Vous aimerez peut-être aussi
- Tuma Icsv19Document8 pagesTuma Icsv19scribdkhatnPas encore d'évaluation
- Vibration ProjectDocument11 pagesVibration ProjectEileen WongPas encore d'évaluation
- Calculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous GeneratorDocument8 pagesCalculation of Unbalanced Magnetic Pull in A Salient-Pole Synchronous GeneratorVikas KumarPas encore d'évaluation
- Stability and Vibration Analysis of A Complex Exible Rotor Bearing SystemDocument18 pagesStability and Vibration Analysis of A Complex Exible Rotor Bearing SystemtejasckPas encore d'évaluation
- Axial Position and Speed Vector Control of The Inset PermanentDocument6 pagesAxial Position and Speed Vector Control of The Inset PermanentLê Đức ThịnhPas encore d'évaluation
- A.C.Synchronous Transmitter Manual PDFDocument15 pagesA.C.Synchronous Transmitter Manual PDFAbhishek RajPas encore d'évaluation
- Fei2013 Article InvestigationOfTheDynamicCharaDocument13 pagesFei2013 Article InvestigationOfTheDynamicCharaAgustín Erasmo Juárez MartínezPas encore d'évaluation
- Paper LiuDocument4 pagesPaper LiuRoshan ShanmughanPas encore d'évaluation
- Towards Rotordynamic Analysis With COMSOL Multiphysics Towards Rotordynamic Analysis With COMSOL MultiphysicsDocument5 pagesTowards Rotordynamic Analysis With COMSOL Multiphysics Towards Rotordynamic Analysis With COMSOL MultiphysicsjaypallaPas encore d'évaluation
- O A T A O Oatao: Pen Rchive Oulouse Rchive UverteDocument16 pagesO A T A O Oatao: Pen Rchive Oulouse Rchive UverteAnonymous LU3Dz3TKtVPas encore d'évaluation
- Michon 3311Document14 pagesMichon 3311mohammedPas encore d'évaluation
- What Is An Orbit MotorDocument10 pagesWhat Is An Orbit MotorishwarPas encore d'évaluation
- Dynamic Analysis of Rotor-Bearing Systems by Optimization MethodDocument7 pagesDynamic Analysis of Rotor-Bearing Systems by Optimization MethodNicoara AdrianaPas encore d'évaluation
- Calculation of Rotor Interference in Screw CompresDocument9 pagesCalculation of Rotor Interference in Screw CompresAdrian SetyadharmaPas encore d'évaluation
- Torsion Pendulum A Mechanical Nonlinear OscillatorDocument7 pagesTorsion Pendulum A Mechanical Nonlinear OscillatorLeo ChakravartyPas encore d'évaluation
- Mercier2019 PDFDocument42 pagesMercier2019 PDFacar1Pas encore d'évaluation
- NTN TR75 en P053Document9 pagesNTN TR75 en P053hollabackcockPas encore d'évaluation
- Effect of Bearing Housing On Centrifugal Pump RotordynamicDocument6 pagesEffect of Bearing Housing On Centrifugal Pump Rotordynamicmsh16000Pas encore d'évaluation
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDaniel CamargoPas encore d'évaluation
- Zhenwei Yuana Fulei Chua Yanli Lina External and Internal Coupling Effects of Rotor's BendingDocument9 pagesZhenwei Yuana Fulei Chua Yanli Lina External and Internal Coupling Effects of Rotor's Bendingjonathan.gelli5153Pas encore d'évaluation
- Rotary-Linear Machines - A Survey: January 2010Document5 pagesRotary-Linear Machines - A Survey: January 2010Faisal MaqsoodPas encore d'évaluation
- Finite Element Analysis of Natural Whirl Speeds of Rotating ShaftsDocument7 pagesFinite Element Analysis of Natural Whirl Speeds of Rotating ShaftsmanojPas encore d'évaluation
- The Influence of Cracks in Rotating Shafts: To Cite This VersionDocument26 pagesThe Influence of Cracks in Rotating Shafts: To Cite This VersionbungrisPas encore d'évaluation
- Practical Induction 01Document5 pagesPractical Induction 01sathishPas encore d'évaluation
- Modelos de Slip FactorDocument7 pagesModelos de Slip FactorJulio Alejandro GómezPas encore d'évaluation
- Design and Analysis Trends of Helicopter Rotor SystemsDocument40 pagesDesign and Analysis Trends of Helicopter Rotor SystemsHasan ÖzgenPas encore d'évaluation
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument8 pagesComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoPas encore d'évaluation
- Book Pract RDFFBD Chapter-6 PDFDocument90 pagesBook Pract RDFFBD Chapter-6 PDFVILLANUEVA_DANIEL2064Pas encore d'évaluation
- Book Pract RDFFBD Chapter-6Document90 pagesBook Pract RDFFBD Chapter-6HuongDuongPas encore d'évaluation
- Study On Unbalance Magnetic Pull of The Motorized Spindle Under Different Rotor EccentricitiesDocument5 pagesStudy On Unbalance Magnetic Pull of The Motorized Spindle Under Different Rotor EccentricitiesDiego RamosPas encore d'évaluation
- Three Phase Induction MotorsDocument22 pagesThree Phase Induction MotorsSabiha MahbubPas encore d'évaluation
- Balancing Methodology of A Rigid Rotor Using ArtificialDocument8 pagesBalancing Methodology of A Rigid Rotor Using ArtificialJuan Angel Martinez RamirezPas encore d'évaluation
- Analysis of Unbalanced Magnetic Pull in A Multi-Physic Model of Induction Machine With An Eccentric RotorDocument9 pagesAnalysis of Unbalanced Magnetic Pull in A Multi-Physic Model of Induction Machine With An Eccentric Rotor9096664279Pas encore d'évaluation
- Free Vibration Analysis of A Rotating Beam With Nonlinear Spring and Mass SystemDocument24 pagesFree Vibration Analysis of A Rotating Beam With Nonlinear Spring and Mass SystemRotPas encore d'évaluation
- 3D Inviscid Flutter of Rotor Blades and Stator/Rotor Stage: Romuald Rządkowski Vitaly GnesinDocument12 pages3D Inviscid Flutter of Rotor Blades and Stator/Rotor Stage: Romuald Rządkowski Vitaly Gnesinthrust123Pas encore d'évaluation
- Belli 2004Document6 pagesBelli 2004rosarioiovino23Pas encore d'évaluation
- Forward and Backward Whirling of A Rotor With Gyroscopic EffectDocument10 pagesForward and Backward Whirling of A Rotor With Gyroscopic EffectkennedyfernandoPas encore d'évaluation
- Robot Manipulators: Modeling, Performance Analysis and ControlD'EverandRobot Manipulators: Modeling, Performance Analysis and ControlPas encore d'évaluation
- A 300 000-r Min Magnetically Levitated Reaction Wheel DemonstratorDocument4 pagesA 300 000-r Min Magnetically Levitated Reaction Wheel DemonstratorxrovljolscjvmiszchPas encore d'évaluation
- Naf Ems 2013 RotorDocument12 pagesNaf Ems 2013 Rotorletter_ashish4444Pas encore d'évaluation
- 2013-Eling - Dyn of Rotors On Hydrodynamic Bearings-COMSOL ConfDocument7 pages2013-Eling - Dyn of Rotors On Hydrodynamic Bearings-COMSOL ConfAlex CooperPas encore d'évaluation
- Beam VibrationDocument20 pagesBeam Vibrationhmsedighi459Pas encore d'évaluation
- Design Luenberger Observer For An ElectromechanicaDocument17 pagesDesign Luenberger Observer For An ElectromechanicanaghibianmajidPas encore d'évaluation
- Mechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperDocument8 pagesMechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperHo Nhat LinhPas encore d'évaluation
- Mechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperDocument8 pagesMechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperraghulthoppaePas encore d'évaluation
- Sciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveDocument4 pagesSciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveAgusAprilyansahPas encore d'évaluation
- Analysis of Systems With Complex GearsDocument10 pagesAnalysis of Systems With Complex Gearslk700615Pas encore d'évaluation
- A O G E I R - D S: Nalysis F Yroscopic Ffects N Otor ISC YstemsDocument48 pagesA O G E I R - D S: Nalysis F Yroscopic Ffects N Otor ISC YstemsTarun BhardwajPas encore d'évaluation
- Feng 2016 J. Phys.: Conf. Ser. 744 012138 PDFDocument11 pagesFeng 2016 J. Phys.: Conf. Ser. 744 012138 PDFacar1Pas encore d'évaluation
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsAdil AbouelhassanPas encore d'évaluation
- Magnetic Bearings Theory and ApplicationsDocument140 pagesMagnetic Bearings Theory and ApplicationsYüksel Kurtalan100% (2)
- 3-D Stress Analysis Generator Rotor Styudy PDFDocument24 pages3-D Stress Analysis Generator Rotor Styudy PDFdkymqPas encore d'évaluation
- Modelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionDocument28 pagesModelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionMostafadarwishPas encore d'évaluation
- Diskrete-Cotinuum Methods Application For Rotating Machine-Absorber Interaction AnalysisDocument4 pagesDiskrete-Cotinuum Methods Application For Rotating Machine-Absorber Interaction AnalysisJeffrey StuartPas encore d'évaluation
- 2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMDocument10 pages2014 Piscaglia - Unsteady Engine Analysis With Movinf Mech in OpenFOAMCristiano BeckPas encore d'évaluation
- Ratchet Mechanisms For High-Speed Transmissions: V. P. BondaletovDocument4 pagesRatchet Mechanisms For High-Speed Transmissions: V. P. Bondaletovsatheeshsep24Pas encore d'évaluation
- Study of a reluctance magnetic gearbox for energy storage system applicationD'EverandStudy of a reluctance magnetic gearbox for energy storage system applicationÉvaluation : 1 sur 5 étoiles1/5 (1)
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsD'EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsPas encore d'évaluation
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsD'EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsPas encore d'évaluation
- Composite Shaft Analysis JMST - PDF: by Pinank PatelDocument9 pagesComposite Shaft Analysis JMST - PDF: by Pinank PatelPinank PatelPas encore d'évaluation
- Campus by ABC Bearings LTDDocument3 pagesCampus by ABC Bearings LTDPinank PatelPas encore d'évaluation
- Topology Design of Optimizing Material Arrangements of Beam-To-Column Connection Frames With Maximal StiffnessDocument8 pagesTopology Design of Optimizing Material Arrangements of Beam-To-Column Connection Frames With Maximal StiffnessPinank PatelPas encore d'évaluation
- Class List - Suspended Student: SR GR No Roll No Admission Quota Cast Enrollment NoDocument8 pagesClass List - Suspended Student: SR GR No Roll No Admission Quota Cast Enrollment NoPinank PatelPas encore d'évaluation
- Amp 1819Document10 pagesAmp 1819Pinank PatelPas encore d'évaluation
- Object Oriented ParadigmDocument2 pagesObject Oriented ParadigmDickson JohnPas encore d'évaluation
- Approvals Management Responsibilities and Setups in AME.B PDFDocument20 pagesApprovals Management Responsibilities and Setups in AME.B PDFAli LoganPas encore d'évaluation
- The Pneumatics of Hero of AlexandriaDocument5 pagesThe Pneumatics of Hero of Alexandriaapi-302781094Pas encore d'évaluation
- Section 1 Company Overview StandardsDocument34 pagesSection 1 Company Overview StandardsChris MedeirosPas encore d'évaluation
- Hyundai SL760Document203 pagesHyundai SL760Anonymous yjK3peI7100% (3)
- Engineering Management: Class RequirementsDocument30 pagesEngineering Management: Class RequirementsMigaeaPas encore d'évaluation
- "Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Document12 pages"Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Gaston AvilaPas encore d'évaluation
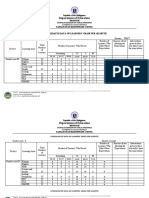
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaPas encore d'évaluation
- FT2020Document7 pagesFT2020Sam SparksPas encore d'évaluation
- ISO Position ToleranceDocument15 pagesISO Position ToleranceНиколай КалугинPas encore d'évaluation
- Stress Management HandoutsDocument3 pagesStress Management HandoutsUsha SharmaPas encore d'évaluation
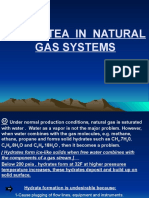
- Chapter 2 HydrateDocument38 pagesChapter 2 HydrateTaha Azab MouridPas encore d'évaluation
- Kübler 5800-5820 - enDocument5 pagesKübler 5800-5820 - enpomsarexnbPas encore d'évaluation
- Fundasurv 215 Plate 1mDocument3 pagesFundasurv 215 Plate 1mKeith AtencioPas encore d'évaluation
- Core CompetenciesDocument3 pagesCore Competenciesapi-521620733Pas encore d'évaluation
- Data SheetDocument56 pagesData SheetfaycelPas encore d'évaluation
- SM EFATEX Rev D2 3 1 2018 PDFDocument20 pagesSM EFATEX Rev D2 3 1 2018 PDFGuilhermePlacidoPas encore d'évaluation
- Agma MachineDocument6 pagesAgma Machinemurali036Pas encore d'évaluation
- Hard DiskDocument9 pagesHard DiskAmarnath SahPas encore d'évaluation
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Document6 pagesCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzPas encore d'évaluation
- The Bio-Based Economy in The NetherlandsDocument12 pagesThe Bio-Based Economy in The NetherlandsIrving Toloache FloresPas encore d'évaluation
- Calculating Free Energies Using Adaptive Biasing Force MethodDocument14 pagesCalculating Free Energies Using Adaptive Biasing Force MethodAmin SagarPas encore d'évaluation
- Manhole Head LossesDocument11 pagesManhole Head Lossesjoseph_mscPas encore d'évaluation
- 28 TerminalsDocument42 pages28 TerminalsAlin FazacasPas encore d'évaluation
- 53 English Work Book XDocument292 pages53 English Work Book XArun DhawanPas encore d'évaluation
- Entrepreneurial Capacity Building: A Study of Small and Medium Family-Owned Enterprisesin PakistanDocument3 pagesEntrepreneurial Capacity Building: A Study of Small and Medium Family-Owned Enterprisesin PakistanMamoonaMeralAysunPas encore d'évaluation
- Daftar ObatDocument18 pagesDaftar Obatyuyun hanakoPas encore d'évaluation
- Internal Resistance To Corrosion in SHS - To Go On WebsiteDocument48 pagesInternal Resistance To Corrosion in SHS - To Go On WebsitetheodorebayuPas encore d'évaluation
- Unit 1 PrinciplesDocument17 pagesUnit 1 PrinciplesRohit YadavPas encore d'évaluation
- Javascript Notes For ProfessionalsDocument490 pagesJavascript Notes For ProfessionalsDragos Stefan NeaguPas encore d'évaluation