Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Some Notes On Aircraft and Spacecraft Stability and Control: Michael Carley, M.j.carley@bath - Ac.ukDocument115 pagesSome Notes On Aircraft and Spacecraft Stability and Control: Michael Carley, M.j.carley@bath - Ac.ukMohammad Reza Madadi100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- 2 PDFDocument16 pages2 PDFMohammad Reza MadadiPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Lakshminarayan Umn 0130M 17648 PDFDocument55 pagesLakshminarayan Umn 0130M 17648 PDFMohammad Reza MadadiPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- ITS P F S P: Ecurity Lan For Light Imulation RogramDocument24 pagesITS P F S P: Ecurity Lan For Light Imulation RogramMohammad Reza MadadiPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Telemetry Adapter V1-0: 09/2016 Operating InstructionsDocument24 pagesTelemetry Adapter V1-0: 09/2016 Operating InstructionsMohammad Reza MadadiPas encore d'évaluation
- Q-Flex QA-2000 Accelerometer: The Inertial Navigation StandardDocument2 pagesQ-Flex QA-2000 Accelerometer: The Inertial Navigation StandardMohammad Reza MadadiPas encore d'évaluation
- NASA Technical Memorandum: N83-OF AND (NASA) A02/8F 63/02Document12 pagesNASA Technical Memorandum: N83-OF AND (NASA) A02/8F 63/02Mohammad Reza MadadiPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Electric Field in A Rectangular Channel With An Electrohydrodynamic Gas PumpDocument12 pagesElectric Field in A Rectangular Channel With An Electrohydrodynamic Gas PumpMohammad Reza MadadiPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Q-Flex QA-3000 Accelerometer: Highest Inertial Navigation-Grade PerformanceDocument2 pagesQ-Flex QA-3000 Accelerometer: Highest Inertial Navigation-Grade PerformanceMohammad Reza MadadiPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Unclassified Ad Number Classification Changes TO: From: Limitation Changes TODocument26 pagesUnclassified Ad Number Classification Changes TO: From: Limitation Changes TOMohammad Reza MadadiPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Classification of The Dubins Set: Andrei M. Shkel, Vladimir LumelskyDocument24 pagesClassification of The Dubins Set: Andrei M. Shkel, Vladimir LumelskyMohammad Reza MadadiPas encore d'évaluation
- The Internet of Things Is Here: PointsDocument2 pagesThe Internet of Things Is Here: PointsMohammad Reza MadadiPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Airborne Radar SimulationDocument16 pagesAirborne Radar SimulationMohammad Reza MadadiPas encore d'évaluation
- Master Thesis: Conceptual Design of Wings and Tailplanes - Methods, Statistics, Tool SetupDocument87 pagesMaster Thesis: Conceptual Design of Wings and Tailplanes - Methods, Statistics, Tool SetupMohammad Reza MadadiPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Aiaa 2009 6050Document11 pagesAiaa 2009 6050Mohammad Reza MadadiPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Iot Systems ChallengesDocument20 pagesIot Systems ChallengesMohammad Reza MadadiPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Matlab Optimization Toolbox Mathworks - IrDocument4 pagesMatlab Optimization Toolbox Mathworks - IrMohammad Reza MadadiPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Autopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodDocument5 pagesAutopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodMohammad Reza MadadiPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- USS E 4 Chapter 4 Pages From EnterpriseDocument5 pagesUSS E 4 Chapter 4 Pages From EnterpriseMohammad Reza MadadiPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
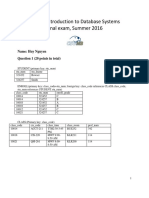
- CST363 Final Exam HuyNguyenDocument9 pagesCST363 Final Exam HuyNguyenHuy NguyenPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Application of ICT and BIM For Implementation of Building ByelawsDocument41 pagesApplication of ICT and BIM For Implementation of Building ByelawsAyesha MalikPas encore d'évaluation
- OSF - Open-Source Miniature Spectrophotometer WikiDocument3 pagesOSF - Open-Source Miniature Spectrophotometer WikibiznizPas encore d'évaluation
- Chapter 1 Maths Cbse 10 Answer-1Document18 pagesChapter 1 Maths Cbse 10 Answer-1RamyaPas encore d'évaluation
- How To Add Fonts To Xdo FileDocument5 pagesHow To Add Fonts To Xdo Fileseethal_2Pas encore d'évaluation
- Deep Learning For Human Beings v2Document110 pagesDeep Learning For Human Beings v2Anya NievePas encore d'évaluation
- Motivate! 2 End-Of-Year Exam Basic: Units 1-9Document6 pagesMotivate! 2 End-Of-Year Exam Basic: Units 1-9Oum Vibol SatyaPas encore d'évaluation
- En 30039205v020200oDocument271 pagesEn 30039205v020200oJesús María García BuenoPas encore d'évaluation
- Chapter 2Document31 pagesChapter 2pavanikaveesha9562Pas encore d'évaluation
- Exam - Chinese PDFDocument81 pagesExam - Chinese PDFmlachake1978100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Murata MA40 SERIESDocument2 pagesMurata MA40 SERIESMiltonAlvaradoPoncePas encore d'évaluation
- Sumobot CodeDocument5 pagesSumobot Codeabubakar_13Pas encore d'évaluation
- Abe 14 Activity Module 4Document9 pagesAbe 14 Activity Module 4Erman DeanoPas encore d'évaluation
- Emona DATEx User Manual V1Document52 pagesEmona DATEx User Manual V1Jesus VinasPas encore d'évaluation
- How To Stop The Charge Account From Rebuilding After Changing The RequesterDocument5 pagesHow To Stop The Charge Account From Rebuilding After Changing The RequesterSaurabh ChandraPas encore d'évaluation
- S23 Autosampler ConfiguratonDocument10 pagesS23 Autosampler ConfiguratonUswatul HasanahPas encore d'évaluation
- SCSE UG BrochureDocument24 pagesSCSE UG Brochuresharathatchayan007Pas encore d'évaluation
- Exam Syria ATA 34Document4 pagesExam Syria ATA 34Mohamed AliPas encore d'évaluation
- Robert Salisbury Email: Office: (713) - 462-5232 Ext.102Document24 pagesRobert Salisbury Email: Office: (713) - 462-5232 Ext.102KaushikPas encore d'évaluation
- KPLC DistributionDocument598 pagesKPLC DistributionRahabGathoni50% (2)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- OTM INtegration ShippingDocument21 pagesOTM INtegration Shippingkkathiresan4998100% (1)
- Intelligence Officer Weekly Test 01Document16 pagesIntelligence Officer Weekly Test 01onlyforacademy13Pas encore d'évaluation
- Apple, Inc. v. Andrew AudeDocument36 pagesApple, Inc. v. Andrew AudeMacRumors on Scribd100% (2)
- Construction 4.0Document43 pagesConstruction 4.0Hamda GhaffarPas encore d'évaluation
- BOSS ManualDocument182 pagesBOSS ManualMohanPas encore d'évaluation
- Intro CH 03ADocument18 pagesIntro CH 03Aapi-3831049100% (7)
- Treatment of Assets Under Construction in SAP - From Creation To Settlement - SapGurusDocument22 pagesTreatment of Assets Under Construction in SAP - From Creation To Settlement - SapGurusAman VermaPas encore d'évaluation
- Computational GraphDocument17 pagesComputational GraphRam MurthyPas encore d'évaluation
- Designing and Maitenance of Control PanelDocument40 pagesDesigning and Maitenance of Control PanelVenomPas encore d'évaluation
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureD'EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsD'EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsPas encore d'évaluation
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation