Vous aimerez peut-être aussi
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 pagesReview 1 (Phase II) - Batch-02 ModifiedVi LPas encore d'évaluation
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 pagesReview 1 (Phase II) - Batch-02 ModifiedVi LPas encore d'évaluation
- GSM Based Home Security System: Minor ProjectDocument17 pagesGSM Based Home Security System: Minor Projectvishnu teja MulakaPas encore d'évaluation
- IJEETC 5cd142704439bDocument6 pagesIJEETC 5cd142704439bMugisha EdwinPas encore d'évaluation
- Development of Portable Water Level Sensor For Flood Management SystemDocument6 pagesDevelopment of Portable Water Level Sensor For Flood Management SystemAnonymous 6FUcbaPPas encore d'évaluation
- Design and Simulation of A GSM Buzzer and Gps Modulebased Accident Detection SystemDocument8 pagesDesign and Simulation of A GSM Buzzer and Gps Modulebased Accident Detection SystemGayathri APas encore d'évaluation
- Seminar ReportDocument27 pagesSeminar ReportVi LPas encore d'évaluation
- Car Accident Prevention and Detection Using Eyeblink Sensor and Accelerometer With ArduinoDocument4 pagesCar Accident Prevention and Detection Using Eyeblink Sensor and Accelerometer With ArduinoInternational Journal of Innovative Science and Research Technology100% (1)
- Project Plan: Iot Based Smart Ambulance SystemDocument16 pagesProject Plan: Iot Based Smart Ambulance SystemMarella Vijaya NarasimhaPas encore d'évaluation
- Alcohol DetectionDocument16 pagesAlcohol DetectionSURABHI MALVIYA IET LucknowPas encore d'évaluation
- Iarjset 2021 8714Document4 pagesIarjset 2021 8714Amit KumarPas encore d'évaluation
- Accident Alert System Using GSM GPS and AcceleromeDocument6 pagesAccident Alert System Using GSM GPS and AcceleromeSiva ÑärêshPas encore d'évaluation
- Diminishing Road Accidents On Sharp Curves Using ArduinoDocument4 pagesDiminishing Road Accidents On Sharp Curves Using ArduinoIJARP PublicationsPas encore d'évaluation
- Collision Control and Collision Avoidance Using Ultrasonic SensorDocument6 pagesCollision Control and Collision Avoidance Using Ultrasonic SensorMadhav ReddyPas encore d'évaluation
- Design and Fabrication of A Radar System Using Power PointDocument17 pagesDesign and Fabrication of A Radar System Using Power PointOyadare sarahPas encore d'évaluation
- PEB 802 Capstone Design Project II Progress Assessment 2Document21 pagesPEB 802 Capstone Design Project II Progress Assessment 2Aveshek DeoPas encore d'évaluation
- .ZigBee Based Remote Control Automatic Street Light System PDFDocument5 pages.ZigBee Based Remote Control Automatic Street Light System PDFTrầnThanhTấnPas encore d'évaluation
- DR Fatha-Material PDFDocument3 pagesDR Fatha-Material PDFMAHAMMAD ILIYASPas encore d'évaluation
- Ijresm V3 I4 147Document3 pagesIjresm V3 I4 147normalguy34kPas encore d'évaluation
- Alert System For Emergency State of Vehicle UsersDocument7 pagesAlert System For Emergency State of Vehicle UsersIJRASETPublicationsPas encore d'évaluation
- Chapter Two Theoretical Background: 2.2.1. Sim808 Gps and GSM CardDocument5 pagesChapter Two Theoretical Background: 2.2.1. Sim808 Gps and GSM Cardابو علي الحيدريPas encore d'évaluation
- Arduino Based Smart Home Automation System PDFDocument5 pagesArduino Based Smart Home Automation System PDFdna13 A.Pas encore d'évaluation
- Vehicle Theft Detection System Based On Nordic Radio FrequencyDocument6 pagesVehicle Theft Detection System Based On Nordic Radio FrequencymashirPas encore d'évaluation
- Vehicle Speed Detection System Using IR PDFDocument7 pagesVehicle Speed Detection System Using IR PDFSIDHARTH MISHRAPas encore d'évaluation
- PEB 802 Capstone Design Project II Progress Assessment 1 TemplateDocument21 pagesPEB 802 Capstone Design Project II Progress Assessment 1 TemplateAveshek DeoPas encore d'évaluation
- Accident Alert System Using GSM GPS and AcceleromeDocument6 pagesAccident Alert System Using GSM GPS and AcceleromeBhupendra(Rahul...) kumarPas encore d'évaluation
- Design of Tsunami Detector Based Sort Message Service Using ArduinoDocument13 pagesDesign of Tsunami Detector Based Sort Message Service Using ArduinoMeila SariPas encore d'évaluation
- Pre-Crash Sensing and Warning System in Hilly Region: R.Meena, R.Lavanya and K.Suresh KumarDocument3 pagesPre-Crash Sensing and Warning System in Hilly Region: R.Meena, R.Lavanya and K.Suresh KumaryasirPas encore d'évaluation
- Automatic Streetlights That Glow On Detecting Night and Object Using ArduinoDocument15 pagesAutomatic Streetlights That Glow On Detecting Night and Object Using Arduinojunaid hussainPas encore d'évaluation
- .Railways Track Crack Detection System Using ArduinoDocument5 pages.Railways Track Crack Detection System Using ArduinosrinivasPas encore d'évaluation
- GSM Based Garbage Monitoring System: IjarcceDocument4 pagesGSM Based Garbage Monitoring System: IjarcceRoborocks ComputerssPas encore d'évaluation
- Intruder Alarm System by AKASE T.TDocument8 pagesIntruder Alarm System by AKASE T.TWeights MattersPas encore d'évaluation
- Project Report On Obstacle Avoiding RobotDocument13 pagesProject Report On Obstacle Avoiding Robotarunraj SuresPas encore d'évaluation
- Smart Gun War Field Spy Robot Using Arduino and ZigbeeDocument10 pagesSmart Gun War Field Spy Robot Using Arduino and ZigbeeIJRASETPublicationsPas encore d'évaluation
- Design & Development of Water Monitoring SystemsDocument44 pagesDesign & Development of Water Monitoring SystemsdileeppatraPas encore d'évaluation
- Project ReportDocument8 pagesProject ReportLeo UltraPas encore d'évaluation
- RoverDocument3 pagesRoverClass 12Pas encore d'évaluation
- IRJET V4I6575 With Cover Page v2Document5 pagesIRJET V4I6575 With Cover Page v2Monisha S.Pas encore d'évaluation
- Failed Publication PaperDocument6 pagesFailed Publication PaperBajarla IsmailPas encore d'évaluation
- Telehealth Monitoring Based Myoelectric Prosthetic ArmDocument27 pagesTelehealth Monitoring Based Myoelectric Prosthetic ArmAll Engineering ElectronicsPas encore d'évaluation
- Vehicle Theft Detection and Secure System Using ArduinoDocument4 pagesVehicle Theft Detection and Secure System Using ArduinoAditya BobadePas encore d'évaluation
- Controlling of Home Appliances Using Arduino UNO BoardDocument4 pagesControlling of Home Appliances Using Arduino UNO BoardZia Ul IslamPas encore d'évaluation
- Solar Operated Metal Detector Robot Based On GSMDocument4 pagesSolar Operated Metal Detector Robot Based On GSMIJIRSTPas encore d'évaluation
- PRJ p677Document8 pagesPRJ p677Rheymar BarcalaPas encore d'évaluation
- Earthquake Detector Research PaperDocument1 pageEarthquake Detector Research PaperTanya YadavPas encore d'évaluation
- Seventh Sem Project ReportttttDocument6 pagesSeventh Sem Project ReportttttDishaPas encore d'évaluation
- Iot AshishDocument11 pagesIot Ashishraoravinder714Pas encore d'évaluation
- Wireless Sensor Network For Monitoring Control ofDocument12 pagesWireless Sensor Network For Monitoring Control ofkristine cruzPas encore d'évaluation
- 12.wireless Blackbox For Cars Using Sensors AndGps ModuleDocument4 pages12.wireless Blackbox For Cars Using Sensors AndGps Module20EEE24 Balaji kanna MPas encore d'évaluation
- Absract 2Document2 pagesAbsract 2Indomie spesialPas encore d'évaluation
- Smart Blind StickDocument5 pagesSmart Blind StickLalitPas encore d'évaluation
- Autonomous Accident Detection and Information SystemDocument4 pagesAutonomous Accident Detection and Information SystemRahul yadavPas encore d'évaluation
- Ijece - Sewage Block Identification and Rescue System Using Wireless Sensor - 1Document6 pagesIjece - Sewage Block Identification and Rescue System Using Wireless Sensor - 1iaset123Pas encore d'évaluation
- How To Make A Tilt Sensor With ArduinoDocument6 pagesHow To Make A Tilt Sensor With ArduinoRemyaPas encore d'évaluation
- School of Engineering and Natural Sciences: Introduction To EE/COEDocument8 pagesSchool of Engineering and Natural Sciences: Introduction To EE/COEextazyfox2Pas encore d'évaluation
- CHNDDocument22 pagesCHNDchandhuPas encore d'évaluation
- Smart Blind Stick Using Ultrasonic Sensor and ArduinoDocument6 pagesSmart Blind Stick Using Ultrasonic Sensor and ArduinoTony JackiPas encore d'évaluation
- IR Employed Arduino Based Accident-Avoidance Hilly AreasDocument6 pagesIR Employed Arduino Based Accident-Avoidance Hilly AreasIJRASETPublicationsPas encore d'évaluation
- Driver Safety Monitoring System Using IotDocument11 pagesDriver Safety Monitoring System Using IotBarnadip BanerjeePas encore d'évaluation
- Mini Conveyor Using Geneva MechanismDocument2 pagesMini Conveyor Using Geneva MechanismVinayaga ProjectinstitutePas encore d'évaluation
- Design of Gear Operated Hand Mixer GrinderDocument4 pagesDesign of Gear Operated Hand Mixer GrinderVinayaga ProjectinstitutePas encore d'évaluation
- Horizontal and Vertical Tiles Cleaner: SynopsisDocument5 pagesHorizontal and Vertical Tiles Cleaner: SynopsisVinayaga ProjectinstitutePas encore d'évaluation
- Design and Fabrication of Pedal Powered Lawn Mower CycleDocument2 pagesDesign and Fabrication of Pedal Powered Lawn Mower CycleVinayaga ProjectinstitutePas encore d'évaluation
- Fabrication of Solar Grass CutterDocument3 pagesFabrication of Solar Grass CutterVinayaga ProjectinstitutePas encore d'évaluation
- Automatic Sanitizer MachineDocument3 pagesAutomatic Sanitizer MachineVinayaga ProjectinstitutePas encore d'évaluation
- Three Axis Pneumatic Modern TrailerDocument15 pagesThree Axis Pneumatic Modern TrailerTanvi KhuranaPas encore d'évaluation
- 25.IR Sensor Based Homeindustrial AutomationDocument1 page25.IR Sensor Based Homeindustrial AutomationVinayaga ProjectinstitutePas encore d'évaluation
- Foot Step Power Generation Project ReportDocument35 pagesFoot Step Power Generation Project ReportTanvi Khurana70% (23)
- Automatic Rain Operated WiperDocument20 pagesAutomatic Rain Operated WiperVincent Paul100% (1)
- Automatic Rain Operated Wiper SystemDocument20 pagesAutomatic Rain Operated Wiper SystemVinayaga ProjectinstitutePas encore d'évaluation
- 18.automatic Hand Wash With Soap SolutionDocument1 page18.automatic Hand Wash With Soap SolutionVinayaga ProjectinstitutePas encore d'évaluation
- Cam ViceDocument3 pagesCam VicemkkfakesPas encore d'évaluation
- 27.automatic Reverse Obstacle Alarm For VehicleDocument1 page27.automatic Reverse Obstacle Alarm For VehicleVinayaga ProjectinstitutePas encore d'évaluation
- 15.speed Monitor For Motor Using Proximity SensorDocument2 pages15.speed Monitor For Motor Using Proximity SensorVinayaga ProjectinstitutePas encore d'évaluation
- MyggfDocument1 pageMyggfVinayaga ProjectinstitutePas encore d'évaluation
- Automatic Mini CNC Plotter MachineDocument3 pagesAutomatic Mini CNC Plotter MachineVinayaga ProjectinstitutePas encore d'évaluation
- Automatic Room Temperature Controller Using ArduinoDocument3 pagesAutomatic Room Temperature Controller Using ArduinoVinayaga ProjectinstitutePas encore d'évaluation
- 16.eye Blink Sensing and Accident PreventerDocument1 page16.eye Blink Sensing and Accident PreventerVinayaga ProjectinstitutePas encore d'évaluation
- Web Controlled Servo Motor Using Arduino - Iot ProjectDocument3 pagesWeb Controlled Servo Motor Using Arduino - Iot ProjectVinayaga ProjectinstitutePas encore d'évaluation
- Automatic Mini CNC Plotter MachineDocument3 pagesAutomatic Mini CNC Plotter MachineVinayaga ProjectinstitutePas encore d'évaluation
- Design and Fabrication of Red Skin Removing MachineDocument32 pagesDesign and Fabrication of Red Skin Removing MachineSathiya UdumalpetPas encore d'évaluation
- Fabrication of Pneumatic Auto Feed Punching MachineDocument73 pagesFabrication of Pneumatic Auto Feed Punching MachineVinayaga ProjectinstitutePas encore d'évaluation
- Fabrication of Pneumatic Auto Feed Punching MachineDocument73 pagesFabrication of Pneumatic Auto Feed Punching MachineVinayaga ProjectinstitutePas encore d'évaluation
- Fabrication of Automatic Spring Rolling MachineDocument66 pagesFabrication of Automatic Spring Rolling MachineVinayaga ProjectinstitutePas encore d'évaluation
- Digital Dash Board AutomissionDocument72 pagesDigital Dash Board AutomissionVinayaga ProjectinstitutePas encore d'évaluation
- Mileage MeterDocument59 pagesMileage MeterChannel VPas encore d'évaluation
- Mileage MeterDocument59 pagesMileage MeterChannel VPas encore d'évaluation
- Design and Fabrication of Red Skin Removing MachineDocument56 pagesDesign and Fabrication of Red Skin Removing MachineChannel V100% (1)
- Design and Fabrication of Plastic ShredderDocument56 pagesDesign and Fabrication of Plastic ShredderVinayaga Projectinstitute100% (1)
- JD 7710 7810Document349 pagesJD 7710 781019crysti0% (1)
- Accident Prevention SignsDocument6 pagesAccident Prevention SignsJaned PerwiraPas encore d'évaluation
- 2008 Hyundai Azera QRGDocument9 pages2008 Hyundai Azera QRGIbrahim AL-SORAIHIPas encore d'évaluation
- Product Bulletin WA320-6Document64 pagesProduct Bulletin WA320-6Gamal Hari PrasetyoPas encore d'évaluation
- 50cc (AY501997 2001)Document111 pages50cc (AY501997 2001)Kiril ParaliuzovPas encore d'évaluation
- BMW 318ti 1996Document52 pagesBMW 318ti 1996Piotr JaworskiPas encore d'évaluation
- Osram Automotive LightingDocument16 pagesOsram Automotive LightingExecutive Engineer [E ED TVL BSNLPas encore d'évaluation
- 2020 Product CatalogDocument24 pages2020 Product CatalogArturo AhumadaPas encore d'évaluation
- HELLA VALUEFIT LBE Light BarsDocument4 pagesHELLA VALUEFIT LBE Light BarsOskars RozefeldsPas encore d'évaluation
- TATA Nano Owners Manual-3Document9 pagesTATA Nano Owners Manual-3NikhitaPas encore d'évaluation
- Headlamp Aiming PDFDocument3 pagesHeadlamp Aiming PDFY. VásquezPas encore d'évaluation
- Service Bulletin Trucks: HeadlampsDocument17 pagesService Bulletin Trucks: HeadlampsRegistr RegistrPas encore d'évaluation
- 2022 Subaru XV (IDM)Document20 pages2022 Subaru XV (IDM)Febrizal.R.Pas encore d'évaluation
- DRL OFF Corolla 2013Document2 pagesDRL OFF Corolla 2013Berny GarciaPas encore d'évaluation
- Assignment To StudentsDocument6 pagesAssignment To StudentsManikandanPas encore d'évaluation
- Volgren Optimus Brochure PDFDocument16 pagesVolgren Optimus Brochure PDFCarl Von RydingPas encore d'évaluation
- 99B703 Audi R8 2008 Self Study ProgramDocument64 pages99B703 Audi R8 2008 Self Study ProgramVASEK100% (1)
- Citroen c5 Owners Manual 119483Document196 pagesCitroen c5 Owners Manual 119483Ivan SantannaPas encore d'évaluation
- Mitsubishi Colt 2006 Wiring Circuit DiagramDocument82 pagesMitsubishi Colt 2006 Wiring Circuit DiagramVideo100% (1)
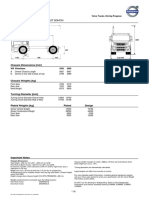
- FM13 4x2 Tractor Air Ride FM 42T B3HCM: Chassis Dimensions (MM)Document4 pagesFM13 4x2 Tractor Air Ride FM 42T B3HCM: Chassis Dimensions (MM)husan shahPas encore d'évaluation
- Jaguar Xe BrochureDocument2 pagesJaguar Xe Brochuresunil chauhanPas encore d'évaluation
- Commonly Used Colour Codes For British Car Wiring: Colour Main/Tracer UseDocument3 pagesCommonly Used Colour Codes For British Car Wiring: Colour Main/Tracer Usehagleyr5638Pas encore d'évaluation
- Personal Protective Equipment (Ppe) - A Short Guide For Wildland FirefightersDocument5 pagesPersonal Protective Equipment (Ppe) - A Short Guide For Wildland FirefightersBenaoumeur FertasPas encore d'évaluation
- BDC PinDocument9 pagesBDC PinStan Laurentiu100% (1)
- Alfa Romeo Tonale MHEVPHEV Price List MY22 DecemberDocument16 pagesAlfa Romeo Tonale MHEVPHEV Price List MY22 DecemberTwinPas encore d'évaluation
- Cole Hersee CatalogDocument172 pagesCole Hersee CatalogJuan Carlos SoHePas encore d'évaluation
- Verkstadshandbok CorollaDocument6 331 pagesVerkstadshandbok CorollaL100% (1)
- Fuse Box Diagram Dacia Renault Duster and Relay With Assignment and LocationDocument11 pagesFuse Box Diagram Dacia Renault Duster and Relay With Assignment and Locationmohhizbar50% (2)
- Lighting Systems From Light To Advanced Vision Technologies Technical Handbook Valeoscope en 998542 WebDocument100 pagesLighting Systems From Light To Advanced Vision Technologies Technical Handbook Valeoscope en 998542 WebavinashmenonPas encore d'évaluation
- Lighting System Session6 Automotive Lighting System PDFDocument65 pagesLighting System Session6 Automotive Lighting System PDFDildar Hussain75% (4)