Académique Documents
Professionnel Documents
Culture Documents
Fpga Control of Linear Induction Motor Fuzzy
Transféré par
chethanDescription originale:
Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Fpga Control of Linear Induction Motor Fuzzy
Transféré par
chethanDroits d'auteur :
Formats disponibles
FPGA-based Servo Control IC for PMLSM Drives with
Adaptive Fuzzy Control
*Ying-Shieh Kung, Member, IEEE, Ming-Hung Tsai, Chia-Sheng Chen
Department of Electrical Engineering,
Southern Taiwan University of Technology,
No.1 Nan-Tai Street, Yung-Kang, Tainan County, 710, Taiwan
*Email:kung@mail.stut.edu.tw
Abstract Due to the progress of VLSI technology in recent
year, the FPGA has brought more attention before. The
A FPGA-based servo control IC for use in a permanent advantages of the FPGA includes their programmable
magnet linear synchronous motor (PMLSM) drive is hard-wired feature, fast time-to-market, shorter design
presented in this paper. Mathematic model of the cycle, embedding processor, low power consumption
PMLSM is presented and the vector control scheme is and higher density for the implementation of the digital
used in the current loop of the PMLSM drive. Then, to system [6]. Many practical applications in ac motor
increase the performance of the PMLSM drive, an control have been studied [7-8]. But, the researchers
adaptive fuzzy controller (AFC) constructed by a fuzzy used the FPGA only to realize the hardware part of the
basis function and a parameter adjustable mechanism is overall servo control system. Nowadays, an embedded
derived and applied to the position loop of PMLSM processor and IP design can be developed and
drive to cope with the dynamic uncertainty and external downloaded into FPGA to construct a SoPC
load effect. After that, a FPGA-based control IC is environment [9-10]. Therefore, in this paper, a high
designed to realize the controllers. The FPGA-based performance servo control IC with adaptive fuzzy
control IC has two IPs (Intellectual Properties), an Nios control is designed for PMLSM drive under this SoPC
embedded processor IP and an application IP. The Nios environment. In the proposed FPGA-based control IC, it
processor is used to perform the function of an adaptive has two IPs, a Nios embedded processor IP and an
fuzzy position controller for PMLSM drive. The application IP. The Nios processor IP is used to
application IP is used to perform the current vector implement an adaptive fuzzy control algorithm by
control of the PMLSM drive, which includes SVPWM software, and the application IP is used to realize the
generation, coordinate transformation, PI controller and current vector control scheme by hardware. Therefore,
the pulse detection of the quadrature encoder. At last, an all of the functions to build up a high-performance
experimental system has been set up and some PMLSM drive can be integrated in a single FPGA.
experimental results have been demonstrated.
2 Description of PMLSM Model and
1 Introduction Design Method
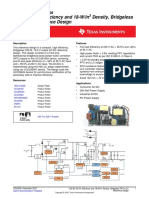
The advantages of superior power density, high- The internal architecture of the proposed FPGA-based
performance motion control with fast speed and better servo system for PMLSM drive is shown in Fig. 1. The
accuracy, are such that permanent magnet linear adaptive fuzzy controller in the position loop and P
synchronous motors (PMLSM) are being increasingly controller in the speed loop is realized by the software
used in many automation control fields as actuators [1- under the Nios embedded processor, but the current
2], including computer-controlled machining tools, X-Y vector control scheme is implemented by PLD hardware.
driving devices, robots, semiconductor manufacturing
equipment, transport propulsion, etc. However, the 2.1 Mathematical Modeling of PMLSM
PMLSM does not use conventional gears or ball screws,
so uncertainty in the drive system greatly affects servo The dynamic model of a typical PMLSM can be
performance [3]. These uncertainties include parameter described as follows
variations, external load disturbance, friction force and di d R π Lq 1
unknown dynamics. They always diminish the = − s id + x& p iq + vd (1)
dt Ld τ Ld Ld
performance of the pre-designed PMLSM driving
system. To solve the above problems, an intelligent di q π Ld R πλf 1 (2)
=− x& p id − s iq − x& p + vq
control techniques [4-5] such as fuzzy control, neural dt τ Lq Lq τ Lq Lq
networks control, adaptive fuzzy control, have been where vd, vq are the d and q axis voltages; id, iq, are the d
developed and applied to the position control of servo and q axis currents, Rs is the phase winding resistance;
motor drives to yield high operating performance. Ld, Lq are the d and q axis inductance; x& p is the
0-7803-9514-X/06/$20.00 ©2006 IEEE ICIEA 2006
FPGA-based servo control IC Current and vector control for ac servo motor
Implemented by hardware (PLD)
Servo control for PMLSM Implemented by software Rectifier AC110V
using Nios embedded processor −1
Modify
−
Park Clarke 1 + −
i d* =0 vd vα vrfx U
xm +ωr−
PI α, β a, b, c v
PWM1
PWM2
+ e uf + u iq* vq vβ
rfy
SVPWM
PWM3
PWM4
3-Phase
inverter
V
Inference KI Kv d, q
d,q α, β vrfz PWM5 W
_ ∆e FI Mechanism
DFI
1 − Z −1 +
PI PWM6
PMLSM
1 − Z −1 + −
- id iα i iu
α,
α,ββ a, b, c a
xp Knowledge
KP ib Current
A/D LPF
iq iβ α, β ic detector iw
Base d, q
d,q A/D LPF
+ − +
Park Clarke A , A ,B
θe π xp − + −
B ,Z ,Z
Adjust A
1-z-1 Sin&Cos Encoder
B
Differ-
Mechanism τ detector &
Z
ential
Transform. Circuit
em
_
xm + xp
Position & speed control: Current loop: 16kHz,
less than 1kHz PWM circuit: 4~8MHz
Fig. 1 The internal architecture of FPGA-based servo control IC for PMLSM drive
translator speed; λ f is the permanent magnet flux Clarke : stationary a-b-c frame to stationary α-β
linkage; τ is the pole pitch. The developed frame.
electromagnetic thrust force is given by [3]. 2 −1 − 1 f
fα 3 (7)
3 f
a
3π f =
3
Fe = (( Ld − Lq )id + λ f )iq (3)
β 0
1 −1 b
f
2τ 3 c
3
The current control of a PMLSM drive is based on
Clarke −1 : stationary α-β frame to stationary a-b-c
a vector control approach. That is, if we control id to 0
frame.
in Fig.1, the PMLSM will be decoupled, so that control
a PMLSM will become easy as to control a DC linear fa 1 0
motor. After simplification and considering the f = −1 3
fα (8)
2
mechanical load, the model of a PMLSM can be b 2
− 3 β
f
f c −21 2
written as the following equations,
3π Park : stationary α-β frame to rotating d-q frame.
Fe = λ f iq ∆ K t iq (4)
2τ f d cosθ e sin θ e fα
f =
(9)
cosθ e f β
with
3π q − sin θ e
Kt = λf (5)
2τ Park −1 : rotating d-q frame to stationary α-β frame.
and the mechanical dynamic equation of PMLSM is fα cos θ e − sin θ e f d (10)
d 2xp f =
cos θ e f q
dx p
Fe − FL = M m 2
+ Bm (6) β sin θ e
dt dt
where Fe is the motor thrust force, K t is force
constant, M m is the total mass of the moving element, 2.3 Adaptive Fuzzy Controller (AFC) in
Position Control Loop
Bm is viscous friction coefficient and FL is the
external force. The structure of an adaptive fuzzy controller for
PMLSM drives is depicted in the dotted line of Fig. 1,
which consists of a fuzzy controller (FC), a reference
2.2 Coordinate Transformation model and an adjusting mechanism. In Fig.1, the
tracking error and the change of the error, e , ∆e are
The coordination transformation of the PMLSM is
similar to that in the synchronous rotating reference defined as
frame. The relations of coordination transformation in e ( k ) = xm ( k ) − x p ( k ) , (11)
the rotating motor between stationary a-b-c frame, ∆e(k ) = e(k ) − e(k − 1) , (12)
stationary α-β frame and synchronously rotating d-q and e, ∆e and uf as input and output variable of fuzzy
frame are are described as follows, and where f s is a controller, respectively. The design procedure of the
space vector refer to current, voltage or flux. fuzzy controller is as follows:
Define the linguist value are { A1 , A2 , E} with the From (19) and (20), we have
symmetrical triangular membership function: x p ( k ) = ( A + 1 − Bk v ) x p ( k − 1) − (1 − BK v ) x p ( k − 2) (21)
0 xi ≤ xim − wim / 2 + Bk v u I ( k − 2) + Bk v ( K I + K p )u f ( k − 1)
xi − xim + wim / 2 wm (13) with A = exp(−BmT / M m ) , B = Kt (1− A) / Bm .
xim − i < xi < xim
2
wm / 2
ξ m ( xi , xim , wim ) = m i m
xi + wi / 2 − xi
when m wim Furthermore, according to the chain rule, the partial
x < xi < xi +
m
wim / 2
i
2 differential equation of J ( k + 1) in (16) can be
wm
0 xi ≥ xim + i rewritten as
2
∂J ( k + 1) ∂x ( k + 1) ∂u f (k ) (22)
where xi is input value, ξ m (•) is output value, xim and = −αe (k + 1) p
m
∂c j ( k ) ∂u f ( k ) ∂c j (k )
w im are mean value and width of the triangular where α is learning rate. From (21), (15), (22) and (17),
membership function. it is straightforward that the parameters c j of fuzzy
Derive M fuzzy control rules as initial condition,
such as, controller in (15) can be derived by the following
IF e is A1m and ∆e is Am2 THEN u f is Em ,m=1,2,..,M (14)
expression.
µj
Construct the fuzzy system with u f ( x | θ) from those ∆c j ( k ) = αBK v ( K p + K I ) e m (k )
∑µ m (23)
M rules using the singleton fuzzifier, product- m
inference rule, and central average defuzzifier µj
≈ αSgn ( B ) K v ( K p + K I ) e m (k )
method. Therefore, (14) is replaced with the ∑µ m
following expression: m
M M Because the motor parameter B is not easy to know, the
∑ cm[∏i =1 ξm ( xi , xim , wim )] ∑ cm µm
2
(15) sgn(B) is employed to calculate in (23). The sgn(.)
u f ( x |θ ) = m =1
M
∆ m =1
M
denoted the sign operator.
∑ [∏i =1 ξm ( xi , xim , wim )] ∑ µm
2
m =1 m =1 2.4 Design of FPGA-based Servo Control IC
those c1 , c 2 ,.., c M are adjustable parameters. for PMLSM Drive
The gradient descent method is adopted to derive the
fuzzy control law in Fig. 1. The main purpose of The internal architecture of the proposed FPGA-based
adjusting the parameters of the fuzzy controller is to servo control IC for PMSM drive is shown in Fig.2. The
minimum the square error (instantaneous cost function) FPGA chip is manufactured by Altera Corporation and
between the position of moving part of the linear motor it can be embedded by a Nios processor. The FPGA
and the output of the reference model. The used in this paper is Cyclone EP1C20, which has
instantaneous cost function is defined as follows: 20,060 LEs, maximum 301 user I/O pins, total 294,912
1 1
J(k +1) = em(k +1)2 = xm(k +1) − xp(k +1)
2 2
[2
(16) ] RAM bits, and a Nios embedded processor which has a
16-bit or 32-bit configurable CPU core, 1 to 20Kbytes
available on chip and maximum 4G bytes off-chip
and the parameters of cj is adjusted with,
memory. A custom software development kit (SDK)
∂J (k + 1) (17) consists of a compiled library of software routines for
∆c j (k ) ∝ −
∂c j (k ) the SoPC design, a Make-file for rebuilding the library,
To derive the formulation of adjusting the parameters, and C header files containing structures for each
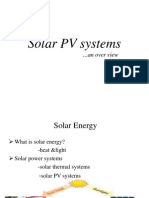
peripheral. In Fig.2, the proposed FPGA-based control
c j at first, we assume FL to be zero, and take Laplace IC has two IPs, a Nios embedded processor IP and an
transformation with (6), and then application IP. The Nios processor is used to perform
x p ( s) K Bm / M m (18) the AFC function of PMLSM drive and its flow chart of
= t interrupt service routine (ISR) for intelligent AFC are
i q* ( s ) Bm s ( s + Bm / M m )
plotted in Fig. 3. The controller program is coded in C
The bilinear transformation is applied and the difference language. The application IP for current vector control
equation of PMLSM drive system can be derived as of PMLSM in Fig.2 is implemented by hardware using
x p (k ) K (1 − e − BmT / M m ) z −1 , (19) PLD due to the need of high-speed but simple
= t − BmT / M m −1 computation and it includes frequency divider, circuits
*
i q (k ) Bm (1 − e z )(1 − z −1 )
of two PI controllers, coordinate transformation of
where z −1 is a back-shift operator, and T is the sampling Clarke, Park, inverse Park, inverse Clarke and circuits
period. In Fig.1, the current command iq* and the output of SVPWM, QEP and ADC conversion control. Figure
4 shows the digital circuit of PI controller, which
of fuzzy controller u f can be obtained by the following includes 3 adders, 2 multipliers, 2 D-type flip-flops and
expression 3 max value limiters. Figures 5 to 6 are the circuits of
iq* (k) = Kv (uI (k −1) + (KI + K p )u f (k) − xp (k) + xp (k −1)) (20) Clark-1 and Park-1 transformation in (8) and (10),
respectively. The block diagram of PWM circuit is
shown in Fig. 7. PWM circuit is designed to be 12 kHz performance of the proposed controller. Figure 8 shows
frequency and 1µs dead-band. The overall circuits the position step responses of the moving part of the
included a Nios embedded processor IP (25.7%) and an linear motor under payload of 0 Kg and 3 Kg using FC
application IP (28.2%) in Fig. 2, use 53.9% utility of when the position command is 1.667Hz square wave
Cyclone EP1C20. signal with 5mm amplitude. The fuzzy rule table is
adequately selected in the case of without any payload,
so the step response in Fig. 8(a) is a good dynamic
3 Experiments and Results
response with a rising time of 90ms, no overshoot and a
The overall experimental system is depicted in Fig. 1, near-zero steady state. However, when a 3 kg payload is
and it includes a FPGA (Cyclone EP1C20), a voltage added and the same fuzzy rule and controller parameters
source IGBT inverter and a PMLSM. The PMLSM was are used, the position dynamic response worsens and
manufactured by the BALDOR electric company; and it exhibits a 10.4% overshoot and a little oscillation in Fig.
is a single-axis stage with a cog-free linear motor and a 8(b). It reveals that the dynamic performance of
stroke length with 600mm. The parameters of the motor PMLSM is affected by a variation in the external
are: Rs = 27 Ω , Ld = Lq = 23.3 mH, Kt = 79.9N/A. The payload. Accordingly, the AFC is adopted in Fig. 1 to
maximum speed and acceleration are 4m/s and 4 g but solve with this problem. Figures 9~10 show the
depend on external load. The moving mass is 2.5Kg, the experimental results with and without the proposed
maximum payload is 22.5Kg and the maximum thrust AFC under the effect of 3Kg and 6Kg payload,
force is 73N under continuous operating conditions. A respectively. Figures 9(a) and 10(a) show a poorer
linear encoder with a resolution of 5µm is mounted on dynamic response with overshoot and oscillation when
the PMLSM as the position sensor, and the pole pitch is only the FC is used. However, when the AFC is adopted,
30.5mm (about 6100 pulses). The inverter has three sets the dynamic responses are improved and presented in
of IGBT power transistors. The collector-emitter Figs. 9(b) and 10(b). Second, the frequency response is
voltage of the IGBT is rated 600V; the gate-emitter considered to evaluate the performance of the proposed
controller. A tested input signal of the sinusoid wave
voltage is rated ±20V, and the DC collector current is
with 10 mm amplitude and a frequency of 1.667Hz is
rated 25A and in short time (1ms) is 50A. The photo-IC,
provided. In this design, the frequency tracking
Toshiba TLP250, is used in the gate driving circuit of
response and the tracking error of the moving part of the
IGBT. Input signals of the inverter are PWM signals
PMLSM with and without the proposed AFC are shown
from FPGA device. For the implement, the PWM
switching frequency of inverter, dead-band and the in Figs. 11 and 12, which reveal that the ±0.35 mm
control sampling frequency of position loop are amplitude tracking error obtained using AFC after one
designed to 12kHz, 1µs, and 1kHz, respectively. period time is better than the ±2 mm tracking error
To evaluate the dynamic performance of PMLSM obtained using only FC. Therefore, from Figs. 8 to 12,
drive, the AFC applied in position control loop of Fig. 1 those results demonstrate that the proposed servo
is tested. The transfer function of the reference model is control IC using SoPC technology for PMLSM drive is
chosen by a second order system with the natural effectiveness and robustness.
frequency of 20 rad/s and the damping ratio of 1. The
step response is firstly tested to evaluate the
Altera FPGA (Cyclone EP1C20)
CLK-ctrl
A[22]
Frequency
Nios Embedded Processor IP I-U[11..0] Application IP CLK-sys CLK
CLK-sp divider
A[0] CPU UART I-W[11..0]
D[31] ADIN[11]
Avalon Bus
Avalon Bus
On-chip PIO IQ[11..0]
ADIN[0]
D[0] ROM
sram_be[3]
QEP[15..0] ADC BDIN[11]
Timer CLK-sys
sram_be[2] On-chip
sram_be[1] CLK-ctrl Control
sram_be[0] RAM BDIN[0]
I-U[11..0]
sram_oe SPI CHA
sram_we I-W[11..0] CHB
sram_cs RCA
RCB
STSA
STSB
CLK-sys
KI-p[11..0] Servo on
CLK-ctrl Dead-band[11..0] PWM-1
ID[11..0]=‘0’
CLK-sys PI PWM-2
SVPWM
PWM-f[11..0]
ID[11..0] PWM-3
IDD[11..0] Controller VA[11..0] PWM-4
KP-p[11..0] VB[11..0] PWM-5
Servo on VC[11..0] PWM-6
KI-q[11..0]
CLK-ctrl
IQ[11..0] CLK-sys
IQ[11..0] PI
IQQ[11..0]
KP-q[11..0]
Controller VDD[11..0]
VQQ[11..0] CLK-sys
QEP[15..0] Servo on CLK-sys Modified VA[11..0]
rotor-position[15..0]
INV PARK
VAA[11..0] VB[11..0]
CLK-sys
VBB[11..0]
INV CLARK VC[11..0]
CLK-sp
CLK-sys
SIN/COS
QEP[15..0]
Encoder-A
EN-A
QEP EN-Z Estimation
EN-B
Encoder-B
Encoder-Z
EN-Z
of Flux
Flux-angle[11..0]
CLK-sys angle IQQ[11..0]
CLK-sys
CLK-sp
IDD[11..0] PARK IAA[11..0]
CLARK I-W[11..0]
IBB[11..0]
CLK-sys I-U[11..0]
Fig. 2 The block diagram of internal circuit of a FPGA-based servo control IC
Start of Start of ISR 8
main program ( each 1kHz ) Command Pay load = 0Kg
6
Position (mm)
Read QEP from current Calculation of q-axis
Initial interrupt
vector control IP and current command and
4
calculate velocity of Send to current vector
control IP
2
PMLSM
Initial timer
0
Calculation of Calculation of error Response
Initial all position error and Between position of -2
peripherals the change of error motor and output of 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
reference model (a) Time (s)
Setting of Calculation of output
position command of Fuzzy controller Parameters adjusting
8
of fuzzy controller
Command Pay load = 3Kg
Position (mm)
6
Calculation of
loop
speed loop End 4
2
Fig. 3 Flow chart of main and ISR program in Nios processor
0
PI Controller
Response
-2
CK
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
D-Type
Ki
CK
FF
Ui(k-1)
+/-
(b) Time (s)
Adder Ui(k)
CK
D-Type
Multi
saturate
Fig. 8 Position step position using FC under (a) without
CK
CMD
+/-
e(k)
FF
e(k-1) payload (b) 3 Kg payload
FBK Sub
saturate CK
U(k)
Up(k) +/-
Kp Multi Adder
saturate
Fig. 4 Digital circuit of PI controller 8
Command Response Without Adaptation
Position (mm)
6
vα va 4
1/2 2‘S COMPLEMENT
2
1/2
0
1/4
-2
0 0.5 1 1.5 2 2.5 3 3.5
1/16 adder vb (a) Time (s)
1/32
vβ adder 8
1/64 Command With Adaptation
6
Position (mm)
1/256
adder 2‘S COMPLEMENT vc
4
1/512
2
1/2048
0
Response
Fig. 5 The designed circuit of Clarke −1 formulation -2
0 0.5 1 1.5 2 2.5 3 3.5
(b) Time (s)
cosθe 12 bits
Fig. 9 Position step response under (a) 3 Kg payload and
multiplier using FC only (b) 3 Kg payload and using the
vd 12 bits vα proposed AFC
adder
− sin θ e 12 bits
vq multiplier
8
Command Response Without Adaptation
sin θ e
Position (mm)
12 bits 6
vd multiplier 4
12 bits
2
cos θ e 12 bits
adder vβ
0
multiplier
vq -2
0 0.5 1 1.5 2 2.5 3 3.5
Fig. 6 The designed circuit of Park −1 formulation (a) Time (s)
8
Generation of Command With Adaptation
Position (mm)
CLK the symmetrical 6
triangular wave
4
Q
12
PWMEA_1
2
S1 CMPR1
Vref1 Comparator PWMEA_2 0
(1) PWM1
12
12 Response
S5 S2 CMPR2 PWMEB_1 PWM2 -2
Vref2 Dead-band
Comparator PWM3 0 0.5 1 1.5 2 2.5 3 3.5
State Machine PWMEB_2 generation
Vref3
12 12 (2) PWM4 (b) Time (s)
CMPR3
unit
S4 S3 Comparator
PWMEC_1 PWM5
PWM6
Fig. 10 Position step response under (a) 6 Kg payload and
12 PWMEC_2
Clk_200n
12 (3) using FC only (b) 6 Kg payload and using the
Clk_40n Clk_200n
SVPWM Algorithm proposed AFC
Fig. 7 Block diagram of SVPWM circuit
15
Command Without Adaptation References
Position (mm)
10
5
[1]F. Gieras and Z.J. Piech, Linear synchronous motors –
transportation and automation systems, CRC Press,
0 2000.
Response
-5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 [2]P.K. Budig, “The application of linear motors,” in
(a) Time (s) Proceedings of the 3rd international of PIEMC, 2000,
4
vol. 3, pp.1336-1340.
2
error (mm)
0
[3]T.H. Liu, Y.C. Lee and Y.H. Chang, “Adaptive
controller design for a linear motor control system,”
-2
IEEE Trans. on Aerospace and Electronics System,
-4 April 2004, vol. 40, no.2, pp. 601-613.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
(b) Time (s) [4]G. Qingding, H. Qingtao and Q. Yanli, “Neural
Fig. 11 (a) frequency response of a 1.667Hz sinusoid input network real-time IP position controller on-line design
signal with 3 kg payload using FC (b) tracking error
for permanent magnetic linear synchronous motor,” in
15
Proceedings of the 7th International on Advanced
Command With Adaptation motion control, pp. 386-389, 2002.
Position (mm)
10
5 [5]F.J. Lin, C.H. Lin and P.K. Huang, “Recurrent fuzzy
neural network controller design using sliding-mode
0
Response control for linear synchronous motor drive,” IEE Proc.
-5 Control Theory Application, vol. 151, no.4, pp. 407-
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
(a) Time (s) 416, July 2004.
4
[6]B.W. Bomar, “Implementation of Microprogrammed
Position (mm)
2
control in FPGAs,” IEEE Trans. on Indust. Electr.,
0 vol. 49, no. 2, pp. 415-422, 2002.
-2
[7]Z. Zhou, T. Li, T. Takahahi and E. Ho, “Design of a
-4
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 Universal Space Vector PWM Controller Based on
(b) Time (s) FPGA,” in Proceedings of the 2004 Applied Power
Fig. 12 (a) frequency response of a 1.667Hz sinusoid input Electronics Conference and Exposition Conference,
signal with 3 kg payload using AFC (b) tracking error vol 3, pp. 1698 ~1702, 2004.
[8]Z.Zhou, T. Li, T. Takahahi and E. Ho, “FPGA
4 Conclusions Realization of a High-performance Servo Controller
for PMSM,” in Proceeding of the 9th IEEE
A FPGA embedded with a Nios processor is successfully Application Power Electronics conference and
developed in the servo control IC of PMLSM drives in Exposition, vol.3, pp. 1604~1609, 2004.
this paper. The FPGA-based servo control IC allows a
fully digital function and high performance control for [9]Y.S. Kung, P.G. Huang and C.W. Chen,
the PMLSM drive, therefore that the current vector “Development of a SOPC for PMSM Drives,” in
control scheme, SVPWM generation, coordinate Proceeding of the 47th IEEE International Midwest
transformation, QEP detection and adaptive fuzzy Symposium on Circuits and Systems, vol. II, pp. II-
position control strategy are all realized and integrated in 329~II-332, 2004.
a single FPGA. The experiments are successfully
validated, and the experimental results show a good [10] Y.S. Kung and G.S. Shu, “Design and
performance. Implementation of a Control IC for Vertical
Articulated Robot Arm using SOPC Technology,” in
Proceeding of 2005 IEEE International Conference
Acknowledgement on Mechatronics, pp. 532~536, 2005.
This work was supported by National Science Council of
the R.O.C. under grant no. NSC 94-2213-E-218-032.
Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 4.power Systems & Synchronous Motor Operation in IndiaDocument12 pages4.power Systems & Synchronous Motor Operation in IndiachethanPas encore d'évaluation
- 5.stability Issues of Synchronous MotorDocument6 pages5.stability Issues of Synchronous MotorchethanPas encore d'évaluation
- 3.operation When Feeding A Local Load, Synchronization & Grid FailureDocument19 pages3.operation When Feeding A Local Load, Synchronization & Grid FailurechethanPas encore d'évaluation
- Radio Frequency DC-DC Power Conversion PDFDocument204 pagesRadio Frequency DC-DC Power Conversion PDFchethanPas encore d'évaluation
- 1.synchronous MachinesDocument13 pages1.synchronous MachineschethanPas encore d'évaluation
- 2.effect of Variation of Load P.F. On Synchronous MachineDocument13 pages2.effect of Variation of Load P.F. On Synchronous MachinechethanPas encore d'évaluation
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanPas encore d'évaluation
- Solar Water PumpingDocument16 pagesSolar Water Pumpingchethan50% (2)
- Basic Data Mining Techniques: AttributesDocument12 pagesBasic Data Mining Techniques: AttributeschethanPas encore d'évaluation
- Model Predictive ControlDocument49 pagesModel Predictive ControlchethanPas encore d'évaluation
- Nanosolar PowersheetDocument18 pagesNanosolar PowersheetchethanPas encore d'évaluation
- Solar PV SystemsDocument21 pagesSolar PV SystemschethanPas encore d'évaluation
- Anupam Vinay Surin 12PS05F P & Es, NitkDocument20 pagesAnupam Vinay Surin 12PS05F P & Es, NitkchethanPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- MF HA12CJ EN E09.12Document117 pagesMF HA12CJ EN E09.12Petroquen Sa VidelaPas encore d'évaluation
- sg1526 Rev1.2Document12 pagessg1526 Rev1.2ChrisPas encore d'évaluation
- AirpaxDocument46 pagesAirpaxbandaraPas encore d'évaluation
- Datasheet TS2012 Audio AmplifierDocument30 pagesDatasheet TS2012 Audio AmplifierNicholas AlvesPas encore d'évaluation
- Sensing - Universal PID-Thermoregulator: Application Note AbstractDocument19 pagesSensing - Universal PID-Thermoregulator: Application Note Abstractnqdinh100% (2)
- Design and Development of A Wind Turbine EmulatorDocument9 pagesDesign and Development of A Wind Turbine EmulatorhieuhuechPas encore d'évaluation
- Hummer-Bot Instruction ManualDocument108 pagesHummer-Bot Instruction Manualinghdj100% (1)
- Discovery Pro Users ManualDocument35 pagesDiscovery Pro Users ManualsimacproPas encore d'évaluation
- Power Electronics Question BankDocument14 pagesPower Electronics Question BankHitesh GoyalPas encore d'évaluation
- Tea 1521 TDocument20 pagesTea 1521 TSamir Del CidPas encore d'évaluation
- Siemens MotorsDocument105 pagesSiemens MotorsAhmed M.FarahatPas encore d'évaluation
- Product Manual 26912 (Revision D, 12/2018) : Digital Valve Positioner (DVP) Service Tool ManualDocument194 pagesProduct Manual 26912 (Revision D, 12/2018) : Digital Valve Positioner (DVP) Service Tool Manualalex pereira pinheiroPas encore d'évaluation
- Analysis of Single-Phase SPWM Inverter: A Thesis Submitted in Partial Fulfillment of The Requirements For The Degree ofDocument46 pagesAnalysis of Single-Phase SPWM Inverter: A Thesis Submitted in Partial Fulfillment of The Requirements For The Degree ofCho Thandar LwinPas encore d'évaluation
- Angular Position (FULL REPORT)Document19 pagesAngular Position (FULL REPORT)Farid AsyrafPas encore d'évaluation
- MDD10A User's ManualDocument10 pagesMDD10A User's ManualiankulehPas encore d'évaluation
- Cython A Guide For Python ProgrammersDocument120 pagesCython A Guide For Python ProgrammersCristh Juarez100% (4)
- Primary-Side Control, Offline LED Controller With Active PFC, NTC and PWM DimmingDocument19 pagesPrimary-Side Control, Offline LED Controller With Active PFC, NTC and PWM Dimmingzuffflor_925748656Pas encore d'évaluation
- AGR Field Operations TD Focus-Scan Data SheetDocument2 pagesAGR Field Operations TD Focus-Scan Data SheetJeganeswaranPas encore d'évaluation
- IGBT Power Losses Calculation Using The Data-Sheet ParametersDocument17 pagesIGBT Power Losses Calculation Using The Data-Sheet ParametersElvis Yu100% (1)
- MID Question PaperDocument5 pagesMID Question PaperSingam SridharPas encore d'évaluation
- Service Manual: CD Mechanism Module (S10Mp3)Document25 pagesService Manual: CD Mechanism Module (S10Mp3)roto44Pas encore d'évaluation
- 2.0 Amp Output Current IGBT Gate Drive Optocoupler: HCPL-3120Document15 pages2.0 Amp Output Current IGBT Gate Drive Optocoupler: HCPL-3120euromoszeusPas encore d'évaluation
- Modicon EmulatorDocument70 pagesModicon EmulatorAl ZanoagaPas encore d'évaluation
- SG6961 DatasheetDocument15 pagesSG6961 DatasheetStefanoViganóPas encore d'évaluation
- Aitecs 2015 - Service ManualDocument79 pagesAitecs 2015 - Service Manualoswaldo_apaza_1Pas encore d'évaluation
- 3-4: Measured Result Table 3-2 Measured Results Of Μa741 Pulse Width Modulator. (V = 3V, F = 500 Hz) Dc Bias Voltage Atv (+) Input Signal Waveforms Output Signal WaveformsDocument10 pages3-4: Measured Result Table 3-2 Measured Results Of Μa741 Pulse Width Modulator. (V = 3V, F = 500 Hz) Dc Bias Voltage Atv (+) Input Signal Waveforms Output Signal WaveformsFirda Firda OoaalaaPas encore d'évaluation
- RT7736GGEDocument24 pagesRT7736GGEPedro AriasPas encore d'évaluation
- Home Lighting LED Canopy Lights of Commercial Lighting For Sale atDocument8 pagesHome Lighting LED Canopy Lights of Commercial Lighting For Sale atDanilo Delgado BonillaPas encore d'évaluation
- Advanced Motion Controls B30A40Document10 pagesAdvanced Motion Controls B30A40Servo2GoPas encore d'évaluation
- Project Essentials Guide: Ni MyrioDocument249 pagesProject Essentials Guide: Ni MyrioFelipeAlfonsoMuñozMorenoPas encore d'évaluation