Académique Documents
Professionnel Documents
Culture Documents
TEMA 1 Calculo 3 UCV
Transféré par
Gerald DavidDescription originale:
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
TEMA 1 Calculo 3 UCV
Transféré par
Gerald DavidDroits d'auteur :
Formats disponibles
Cálculo III Tema 1.
Funciones vectoriales de una variable real
1. Función vectorial de una variable real.
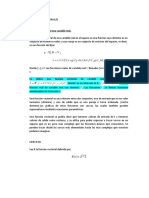
1.1. Definición. Se define una función vectorial de variable real como: r : I → Rn ,
t → r(t) = (r1(t),...,rn (t)) , donde I es un intervalo en R, ri con i = 1,...,n es una función
real de variable real con dominio Ii . Las funciones ri se llaman funciones coordenadas
de la función r.
1.2. Dominio. El dominio de una función vectorial r es la intersección de los dominios de
las funciones coordenadas, es decir,
n
D(r) = II = I.
i =1
i
Ejemplo ilustrativo 1. Dada la función r(t) = ( t − 3, t + 3, t3 ) , encuentre su dominio.
Solución.
Las funciones coordenadas vienen dadas por:
r1(t) = t − 3 ⇒ D(r1 ) = [3, ∞)
r2 (t) = t + 3 ⇒ D(r2 ) = [−3, ∞) .
r3 (t) = t 3
⇒ D(r3 ) = R
Por lo tanto,
3
D(r) = I D(r ) = [3, ∞) .
i =1
i
1.3. Rango. El rango o imagen de una función vectorial r es un conjunto de puntos en
Rn. Muchas funciones vectoriales con imagen en R 2 o R 3 tienen como rango lugares
geométricos conocidos.
Ejemplo ilustrativo 2. Dada la función r(t) = (4 cos(t), 4sen(t)), t ∈ [0,2π] , encuentre
su rango o imagen.
Solución.
La imagen de la función es una circunferencia de radio 4. En efecto llamando a sus
funciones coordenadas x(t) = 4 cos(t), y(t) = 4sen(t) , se tiene
x2 + y2 = 16 cos2 (t) + 16sen2 (t) = 16 .
1.4. Observación. Una función vectorial r lleva implícita dos características fundamentales:
la forma de la curva (imagen de la función) y la manera como se recorre ésta (sentido de
recorrido y posición).
2. Parametrización de algunas curvas conocidas.
2.1. Recta. La imagen de la función vectorial
f(t) = (x0 + (x1 − x0 )t, y0 + (y1 − y0 )t) , t ∈ R
es una recta que pasa por los puntos (x0 , y0 ) y (x1 , y1 ) recorrida en el sentido que va
desde el punto (x0 , y0 ) al punto (x1 , y1 ) . Si se desea cambiar el sentido, basta con
cambiar t por −t . En tal caso se obtiene la función vectorial
g(t) = (x0 + (x0 − x1 )t, y0 + (y0 − y1 )t) , t ∈ R
que resulta ser una recta que pasa por los puntos (x0 , y0 ) y (x1 , y1 ) recorrida en el
sentido que va desde el punto (x1 , y1 ) al punto (x0 , y0 ) .
José Luis Quintero 1
Cálculo III Tema 1. Funciones vectoriales de una variable real
Observación. Si se desea parametrizar un segmento de recta de extremos (x0 , y0 ) y
(x1 , y1 ) recorrido en el sentido que va desde el punto (x0 , y0 ) al punto (x1 , y1 ) se
consigue usando la función vectorial f(t) = (x0 + (x1 − x0 )t, y0 + (y1 − y0 )t) , t ∈ 0,1 .
2.2. Circunferencia. La imagen de la función vectorial
f(t) = (h + r cos(t),k + rsen(t)), t ∈ [0, 2π]
es una circunferencia de centro (h,k) y radio r recorrida en sentido antihorario.
La imagen de la función vectorial
g(t) = (h + r cos(t),k − rsen(t)), t ∈ [0, 2π]
es una circunferencia de centro (h,k) y radio r recorrida en sentido horario.
2.3. Elipse. La imagen de la función vectorial f(t) = (h + a cos(t),k + bsen(t)), t ∈ [0,2π] es
una elipse de ecuación
(x − h)2 (y − k)2
+ =1
a2 b2
recorrida en sentido antihorario. La imagen de la función vectorial
g(t) = (h + a cos(t),k − bsen(t)), t ∈ [0,2π]
es una elipse de ecuación
(x − h)2 (y − k)2
+ =1
a2 b2
recorrida en sentido horario.
2.4. Parábola. La imagen de la función vectorial f(t) = (t, at2 + bt + c) , t ∈ R es una parábola
de ecuación y = ax2 + bx + c con sentido de recorrido de menor a mayor valor de la
variable x. La imagen de la función vectorial f(t) = (at2 + bt + c, t) , t ∈ R es una parábola
de ecuación x = ay2 + by + c con sentido de recorrido de menor a mayor valor de la
variable y.
2.5. Hipérbola. La imagen de la función vectorial
a 2
f(t) = h + b + (t − k)2 , t , t ∈ R
b
es la rama derecha de la hipérbola de ecuación
(x − h)2 (y − k)2
− =1
a2 b2
con sentido de recorrido de menor a mayor valor de la variable y.
La imagen de la función vectorial
a 2
f(t) = h − b + (t − k)2 , t , t ∈ R
b
es la rama izquierda de la hipérbola de ecuación
(x − h)2 (y − k)2
− =1
a2 b2
con sentido de recorrido de menor a mayor valor de la variable y.
La imagen de la función vectorial
b 2
f(t) = t,k + a + (t − h)2 , t ∈ R
a
es la rama superior de la hipérbola de ecuación
José Luis Quintero 2
Cálculo III Tema 1. Funciones vectoriales de una variable real
(x − h)2 (y − k)2
− + =1
a2 b2
con sentido de recorrido de menor a mayor valor de la variable x.
La imagen de la función vectorial
b 2
f(t) = t,k − a + (t − h)2 , t ∈ R
a
es la rama inferior de la hipérbola de ecuación
(x − h)2 (y − k)2
− + =1
a2 b2
con sentido de recorrido de menor a mayor valor de la variable x.
2.6. Cicloide. La cicloide es el lugar geométrico descrito por un punto P sobre una
circunferencia de radio a que gira sin deslizar sobre el eje x. La función vectorial cuya
imagen es la cicloide es f(θ) = (aθ − asen(θ), a − a cos(θ)) , 0 ≤ θ ≤ 2π .
La ecuación rectangular de la cicloide es
a− y
x = a arccos m 2ay − y ,
2
a
en donde debe tomarse el signo positivo o el negativo según que θ sea menor o mayor
que π radianes en el arco comprendido entre θ = 0 y θ = 2π .
2.7. Hélice. La hélice es la imagen de la función vectorial
b
f(t) = r cos(t),rsen(t), t .
2π
Las funciones coordenadas satisfacen la ecuación (x(t))2 + (y(t))2 = r2 , ecuación de la
circunferencia; z(t) = b
2π
t “levanta” el punto a altura b
2π
t . Cuando t aumenta la curva se
recorre en sentido antihorario.
2.8. Ejemplo ilustrativo 3. Determine una parametrización de la curva dada por las
ecuaciones
(x − 2)2 + (y − 1)2 = 4 1 ≤ y ≤ 3
y = 12 (x + 2) 0≤ y ≤1
x2
+ y2 = 1 −1 ≤ y ≤ 0
4
y = 12 (x − 2) 0≤ y ≤1
en sentido antihorario.
Solución.
C1 : (x − 2)2 + (y − 1)2 = 4 , 1 ≤ y ≤ 3 . r1 (t) = (2 + 2 cos(t),1 + 2sen(t)) , 0 ≤ t ≤ π
C2 : y = 1
2
(x + 2) , 0 ≤ y ≤ 1 . r2 (s) = (0 − 2s,1 − s)
0 ≤ s ≤ 1 ⇒ π ≤ s + π ≤ 1 + π ⇒ t = s + π ⇒ s = t − π . r2 (t) = (−2(t − π),1 + π − t) , π < t ≤ 1 + π .
x2
C3 : + y2 = 1 , −1 ≤ y ≤ 0 . r3 (w) = (2 cos(w), sen(w))
4
π ≤ w ≤ 2π ⇒ 1 + π ≤ 1 + w ≤ 1 + 2π ⇒ t = 1 + w ⇒ w = t − 1
r3 (t) = (2 cos(t − 1), sen(t − 1)) , 1 + π < t ≤ 1 + 2π
C4 : y = 1
2
(x − 2) , 0 ≤ y ≤ 1 . r4 (z) = (2 + 2z, 0 + z)
0 ≤ z ≤ 1 ⇒ 1 + 2π ≤ 1 + 2π + z ≤ 2 + 2π ⇒ t = 1 + 2π + z
José Luis Quintero 3
Cálculo III Tema 1. Funciones vectoriales de una variable real
r4 (t) = (2 + 2(t − 1 − 2π), t − 1 − 2π) , 1 + 2π < t ≤ 2 + 2π
Por lo tanto
(2 + 2 cos(t),1 + 2sen(t)) 0≤t≤π
(−2t + 2π,1 + π − t) π < t ≤1+ π
r(t) = .
(2 cos(t − 1), sen(t − 1)) 1 + π < t ≤ 1 + 2π
(2t − 4π, t − 1 − 2π) 1 + 2π < t ≤ 2 + 2π
La gráfica que corresponde es la que se muestra en la figura 1:
Figura 1. Representación gráfica de la curva del ejemplo ilustrativo 3
2.9. Ejemplo ilustrativo 4. Determine una parametrización en sentido horario y obtenga el
gráfico de la curva
y + x +1 = 2 x ≤1
x −y =1 −1 ≤ y ≤ 0 .
2 2
2
x − 2y − 4 = 0 x ≤ 2
Solución.
C1 : y = x + 1 , −1 ≤ x ≤ 0 . r1 (t) = (−1 + t, t) , 0 ≤ t ≤ 1
C2 : y = −x + 1 , 0 ≤ x ≤ 1 . r2 (s) = (s,1 − s)
0 ≤ s ≤ 1 ⇒ 1 ≤ s + 1 ≤ 2 ⇒ t = s + 1 ⇒ s = t − 1.
r2 (t) = (t − 1, 2 − t) , 1 < t ≤ 2
C3 : x = y2 + 1 , −1 ≤ y ≤ 0 . r3 (w) = ( w2 + 1, −w)
0 ≤ w ≤1⇒ 2 ≤ w+2 ≤ 3 ⇒ t = w+2 ⇒ w = t −2.
r3 (t) = ( t2 − 4t + 5,2 − t) , 2 < t ≤ 3
C4 : y = 1
2
x2 − 2 , − 2 ≤ x ≤ 2 . r4 (z) = (−z, 12 z2 − 2)
− 2 ≤ z ≤ 2 ⇒ 3 ≤ z+3+ 2 ≤ 3+2 2 ⇒ t = z+3+ 2 ⇒ z = t−3− 2
r4 (t) = (3 + 2 − t, 12 (t − 3 − 2)2 − 2) , 3 < t ≤ 3 + 2 2
C5 : x = − y2 + 1 , −1 ≤ y ≤ 0 . r3 (w) = (− w2 + 1, w)
−1 ≤ w ≤ 0 ⇒ 3 + 2 2 ≤ w + 4 + 2 2 ≤ 4 + 2 2 ⇒ t = w + 4 + 2 2 ⇒ w = t − 4 − 2 2 .
José Luis Quintero 4
Cálculo III Tema 1. Funciones vectoriales de una variable real
r5 (t) = (− (t − 4 − 2 2)2 + 1, t − 4 − 2 2) , 3 + 2 2 < t ≤ 4 + 2 2
Por lo tanto
(t − 1, t) 0≤ t ≤1
(t − 1, 2 − t) 1 <t≤2
r(t) = ( t2 − 4t + 5, 2 − t) 2<t≤3 .
(3 + 2 − t, 1 (t − 3 − 2)2 − 2) 3< t ≤3+2 2
2
(− (t − 4 − 2 2) + 1, t − 4 − 2 2) 3 + 2 2 < t ≤ 4 + 2 2
2
La gráfica que corresponde es la que se muestra en la figura 2:
Figura 2. Representación gráfica de la curva del ejemplo ilustrativo 4
3. Límite de una función vectorial.
3.1. TEOREMA. Sea r(t) = (r1(t),...,rn(t)) , lím r(t) = L = (l1 ,...,ln ) si y sólo si lím ri(t) = li .
t → t0 t → t0
A efectos de cálculo, se evalúa el límite coordenada a coordenada, es decir.
lím r(t) = lím r1(t),..., lím rn (t) .
t → t0 t → t0 t → t0
3.2. Ejemplo ilustrativo 5. Si
sen(t)
r(t) = t2 , t, ,
t
se tiene
sen(t)
lím r(t) = lím t2 , lím t, lím = (0, 0,1) .
t →0 t →0 t →0 t →0 t
4. Continuidad de una función vectorial.
4.1. Definición. Sea t0 ∈ D(r) . Se dirá que r es continua en t0 si y sólo si lím r(t) = r(t0 ) .
t → t0
4.2. Ejemplo ilustrativo 6. Estudie la continuidad de
2 sen(t)
t , t, si t ≠ 0
r(t) = t .
(0, 0, 0) si t = 0
Solución.
José Luis Quintero 5
Cálculo III Tema 1. Funciones vectoriales de una variable real
sen(t)
lím r(t) = lím t2 , t, = (0, 0,1) ≠ r(0) ,
t →0 t →0 t
por lo tanto la función no es continua en t0 = 0 .
4.3. Observación.
La función r es continua en t0 si y sólo si sus funciones coordenadas ri son continuas en
t0 .
5. Derivada de una función vectorial.
dr
5.1. Definición. Se define la derivada de r en t0 , denotada por r '(t0 ) o bien por dt
(t0 ) ,
como el límite:
r(t0 + h) − r(t0 ) r (t + h) − r1(t0 ) r (t + h) − rn (t0 )
r '(t0 ) = lím = lím 1 0 ,..., n 0
h→ 0 h h →0 h h
r (t + h) − r1(t0 ) r (t + h) − rn(t0 )
= lím 1 0 ,..., lím n 0 = (r1(t0 ),...,rn (t0 )).
' '
h→ 0 h h→ 0 h
5.2. Ejemplo ilustrativo 7. Si r(t) = (2 cos(t), 2sen(t)) se tiene r '(t) = (−2sen(t),2 cos(t)).
5.3. Interpretación geométrica.
Se dice que r '(t0 ) es el vector director de la recta tangente a la curva r(t) en el punto
t0 . La ecuación de la recta tangente a r(t) en t0 viene dada por
f(α) = r(t0 ) + αr '(t0 ) , α ∈ R .
5.4. Ejemplo ilustrativo 8. Halle la ecuación de la recta tangente a r(t) = (cos(t), sen(t)) en
el punto r( 4π ) .
Solución.
r( 4π ) = ( 2
2
, 2
2 ) y r '( ) = ( −
π
4
2
2
, 2
2 ),
por lo tanto la recta tangente tiene ecuación vectorial:
f(α) = ( 2
2
, 2
2 ) + α (− 2
2
, 2
2 ) , α ∈ R.
5.5. Interpretación física.
Si el parámetro t es el tiempo y r(t) es la posición instantánea de un cuerpo entonces:
La velocidad instantánea es v(t) = r '(t) .
La rapidez instantánea es v(t) = v(t) .
La aceleración instantánea es a(t) = r ''(t).
6. Integral de una función vectorial.
Definición. Sea r(t) = (r1(t),...,rn (t)). Se define la integral de r(t) sobre [a,b] como
b b b
∫ a
r(t)dt =
∫ a
r1(t)dt,...,
∫ a
rn (t)dt .
7. Longitud, magnitud o norma de un vector.
7.1. Definición. La longitud, magnitud o norma de un vector es una cantidad escalar
asociada con el tamaño del vector y se puede calcular como
x = x12 + x22 + ... + xn2 .
José Luis Quintero 6
Cálculo III Tema 1. Funciones vectoriales de una variable real
7.2. Propiedades.
a. x = 0 ⇔ x = 0
b. x >0⇔x≠0
c. λx = λ x ( λ escalar real)
d. x + y ≤ x + y (Desigualdad triangular)
7.3. Observaciones.
a. x se dice unitario si y sólo si x = 1
x
b. Sea x ∈ Rn , entonces es unitario
x
8. Longitud de arco.
8.1. Definición. Sea C la curva definida por r(t) en un intervalo abierto I, tal que r '(t) existe
y sea continua en I. Si la curva C satisface las hipótesis anteriores entonces la longitud
de curva comprendida entre r(a) y r(t) está dada por
t
s(t) =
∫ a
r '(α) dα .
8.2. Ejemplo ilustrativo 9. Calcule la longitud de una circunferencia de radio a.
Solución.
Una parametrización para la circunferencia es r(t) = (a cos(t), asen(t)) con 0 ≤ t ≤ 2π .
Luego r '(t) = (−asen(t), a cos(t)) y su longitud será:
2π 2π 2π
s=
∫ 0
r '(t) dt =
∫ 0
(−asen(t)) + (a cos(t)) dt = a
2 2
∫
0
dt = 2πa .
9. Parametrización intrínseca de una curva.
9.1. Definición. Dada una curva r(t), se puede reparametrizar usando s como parámetro; se
llama a ésta la parametrización intrínseca de la curva.
9.2. Ejemplo ilustrativo 10. La curva dada por r(t) = (3 cos(t), 3sen(t), 4t) es una hélice.
Reparametrizarla en función de la longitud de arco.
Solución.
t t t
s(t) =
∫ 0
r '(α) dα =
∫ 0
9sen (α) + 9 cos (α) + 16dα = 5
2 2
∫ 0
dα = 5t ,
de modo que t = s 5 . Por lo tanto en función de la longitud de arco se tiene la función
vectorial
s s 4
r(s) = 3 cos , 3sen , s .
5 5 5
9.3. TEOREMA. Si r(s) es la parametrización intrínseca de una curva C entonces r '(s) = 1 .
José Luis Quintero 7
Cálculo III Tema 1. Funciones vectoriales de una variable real
10. Gráficas de curvas paramétricas en R2.
Para construir curvas definidas mediante una función vectorial se estudian las funciones
coordenadas x(t), y(t). El esquema a seguir, contiene ciertos detalles:
I. Información de r(t):
a. Dominio de r(t) denotado como D(r)
b. Corte con los ejes:
• Eje x: Encuentre t ∈ D(r) tal que y(t) = 0
• Eje y: Encuentre t ∈ D(r) tal que x(t) = 0
c. Signo. Tome en cuenta los valores de t donde hay cortes con algún eje así como los
valores de t para los cuales r(t) no es continua
d. Simetrías:
• Si D(r) es simétrico y r(−t) = (−x(t), −y(t)) , la curva es simétrica respecto del origen
• Si D(r) es simétrico y r(−t) = (−x(t), y(t)) , la curva es simétrica respecto del eje y
• Si D(r) es simétrico y r(−t) = (x(t), −y(t)) , la curva es simétrica respecto del eje x
e. Asíntotas y puntos asintóticos:
• Si t0 = ±∞ (si está dentro del dominio de la función vectorial) entonces:
• Si l í m x(t) = k y l í m y(t) = ±∞ , x = k es una asíntota vertical
t → t0 t → t0
• Si l í m x(t) = ±∞ y l í m y(t) = k , y = k es una asíntota horizontal
t → t0 t → t0
y(t)
• Si l í m x(t) = ±∞ , l í m y(t) = ±∞ , lí m = m y l í m[y(t) − mx(t)] = b con m y b
t → t0 t → t0 t → t0 x(t) t → t0
finitos entonces y = mx + b es una asíntota oblicua
• Si l í m x(t) = a y lí m y(t) = b , (a,b) es un punto asintótico
t → t0 t → t0
• Si r(t) no es continua en t0 entonces:
• Si lí m x(t) = k y l í m y(t) = ±∞ o lí m x(t) = k y lí m y(t) = ±∞ , x = k es una
−
t → t0 −
t → t0 t → t+ t → t+
0 0
asíntota vertical
• Si l í m x(t) = ±∞ y lí m y(t) = k o lí m x(t) = ±∞ y lí m y(t) = k , y = k es una
−
t → t0 −
t → t0 t → t+ t → t+
0 0
asíntota horizontal
y(t)
• Si l í m x(t) = ±∞ , l í m y(t) = ±∞ , lí m = m y l í m[y(t) − mx(t)] = b con m y b
t → t0 t → t0 t → t0 x(t) t → t0
finitos entonces y = mx + b es una asíntota oblícua
• Si l í m x(t) = a y lí m y(t) = b , (a,b) es un punto asintótico
t → t0 t → t0
II. Información de r'(t):
a. Cálculo de r'(t)
b. Dominio de r'(t) denotado como D(r’)
c. Tangentes y puntos cuspidales
• Si x '(t0 ) = 0 , t0 ∈ D(r') , con y '(t0 ) ≠ 0 , entonces se tiene una tangente vertical
de ecuación x = x(t0 ) al gráfico en r(t0 )
• Si y '(t0 ) = 0 , t0 ∈ D(r') , con x '(t0 ) ≠ 0 , entonces se tiene una tangente horizontal
de ecuación y = y(t0 ) al gráfico en r(t0 )
José Luis Quintero 8
Cálculo III Tema 1. Funciones vectoriales de una variable real
• Si r '(t0 ) = (0, 0) , t0 ∈ D(r') , entonces se tiene un punto cuspidal (pico) al gráfico
en t0
d. Crecimiento y decrecimiento de r(t) . Tome en cuenta los valores de t donde
x '(t) = 0 o y '(t) = 0 así como los valores de t para los cuales r’(t) no es continua.
e. Valores máximos y mínimos. Tome en cuenta los valores de t, ( t ∈ D(r') ), para los
cuales x '(t) = 0 y x '(t − ).x '(t + ) < 0 así como los valores de t para los cuales y '(t) = 0 y
y '(t − ).y '(t + ) < 0 , donde t − es un número cercano a t y menor que t y t + es un
número cercano a t y mayor que t.
III. Gráfico de r(t)
11. Ejemplos ilustrativos sobre construcción de curvas.
11.1. Ejemplo ilustrativo 12. Estudie en forma detallada y grafique la curva
t2 t2
r(t) =
1 − t2 1 − t
, ,
indicando el sentido del recorrido.
Solución.
I. Información de r(t) :
a. Dominio: R − {−1,1} .
b. Corte con los ejes:
Eje x: y = 0 ⇒ t = 0 . Eje y: x = 0 ⇒ t = 0 , r(0) = (0, 0) . Pasa por el origen.
c. Signo:
t -1 0 1
x - + + -
y + + + -
Cuadrante II I I III
d. Simetrías:
(−t)2 (−t)2 t2 t2
r(−t) = =
1 − (−t)2 1 − (−t) 1 − t2 1 + t
, , .
La curva no presenta ningún tipo de simetría.
e. Asíntotas y puntos asintóticos:
• Verticales:
t2 t2 t2 t2
lím = −1 , lím
= +∞ . lím = −1 , lím = −∞ .
t → −∞ 1 − t2 t → −∞ 1 − t t → +∞ 1 − t2 t →+∞ 1 − t
Por tanto x = −1 es asíntota vertical de la curva cuando t → −∞ y cuando
t → +∞ .
• Horizontales:
t2 t2 1 t2 t2 1
lím = −∞ , lím = , lím = +∞ , lím = .
t → −1 1 − t
− 2
t → −1− 1 − t 2 t →−1 1 − t
+ 2
t →−1+ 1 − t 2
Por lo tanto y = 2 es una asíntota horizontal de la curva cuando t → −1 .
1
• Oblicuas:
t2 t2 t2 t2
lím = +∞ , lím = +∞ . lím = −∞ , lím = −∞
t →1− 1−t t →1− 1 − t t →1+ 1 − t t →1+ 1 − t
2 2
José Luis Quintero 9
Cálculo III Tema 1. Funciones vectoriales de una variable real
t2
1− t t2 (1 − t2 )
m= lím 2 = lím = lím(1 + t) = 2 .
t →1 t t →1 t2 (1 − t) t →1
1 − t2
t2 t2 t2 (1 + t) − 2t2 t2 + t3 − 2t2 t2 + t3 − 2t2
b = lím −2 = lím = lím = lím
t →1 1 − t 1 − t2 t →1 1 − t2 t →1 1 − t2 t →1 1 − t2
t3 − t 2 t3 − t 2 t2 (t − 1) −t2 (1 − t) −t2 1
= lím = lím = lím = lím = lím =− .
t →11 − t2 t →1 1 − t2 t →1 1 − t2 t →1 (1 + t)(1 − t) t →1 (1 + t) 2
Por lo tanto y = 2x − 12 es una asíntota oblícua de la curva cuando t → 1 .
II. Información de r'(t):
a. Cálculo de r'(t):
2t t(2 − t) 2t t(2 − t)
x '(t) = , y '(t) = . r '(t) = , 2
.
(1 − t ) (1 − t) (1 − t ) (1 − t)
2 2 2 2 2
b. Dominio: R − {−1,1}
c. Tangentes y puntos cuspidales:
• Verticales: x '(t) = 0 ⇒ t = 0 , y '(0) = 0 . No tiene tangentes verticales.
• Horizontales: y '(t) = 0 ⇒ t = 0 ó t = 2 , x '(2) = 4
9
.
La curva tiene una tangente horizontal en r(2) = − 34 , −4 de ecuación y = −4 . ( )
• Puntos cuspidales: r '(0) = (0, 0) .
d. Crecimiento y decrecimiento de r(t) :
t -1 0 1 2
x’ - - + + +
y’ - - + + -
e. Valores máximos y mínimos: x(0) = 0 es un valor mínimo para la función x.
y(0) = 0 es un valor mínimo e y(2) = −4 es un valor máximo para la función y.
III. Gráfico de r(t): (ver figura 3)
Figura 3. Representación gráfica de la curva
José Luis Quintero 10
Cálculo III Tema 1. Funciones vectoriales de una variable real
11.2. Ejemplo ilustrativo 13. Estudie en forma detallada y grafique la curva
2t − 1 t2
r(t) = 2
t − 1 t − 1
, ,
indicando el sentido del recorrido.
Solución.
I. Información de r(t) :
a. Dominio: R − {−1,1} .
b. Corte con los ejes:
Eje x: y = 0 ⇒ t = 0 , r(0) = (1, 0) Eje y: x = 0 ⇒ t = 1
2
, r( 12 ) = (0, − 12 )
c. Signo:
t -1 0 1/2 1
x - + + - +
y - - - - +
Cuadrante III IV IV III I
d. Simetrías:
2(−t) − 1 (−t)2 −2t − 1 t2
r(−t) = =
(−t)2 − 1 (−t) − 1 t2 − 1 −t − 1
, , .
La curva no presenta ningún tipo de simetría.
e. Asíntotas y puntos asintóticos:
• Verticales:
2t − 1 t2 2t − 1 t2
lím = 0 , lím
= −∞ . lím = 0 , lím = +∞ .
t → −∞ t2 − 1 t →−∞ t − 1 t → +∞ t2 − 1 t → +∞ t − 1
Por lo tanto x = 0 es una asíntota vertical de la curva cuando t → −∞ y
cuando t → +∞ .
• Horizontales:
2t − 1 t2 1 2t − 1 t2 1
lím 2 = −∞ , lím =− , lím 2 = +∞ , lím =− .
t → −1 t − 1
− t → −1 t − 1
− 2 t →−1 t − 1
+ t → −1 t − 1
+ 2
Por lo tanto y = − 2 es una asíntota horizontal de la curva cuando t → −1 .
1
• Oblicuas:
2t − 1 t2 2t − 1 t2
lím = −∞ , lím = −∞ . lím 2 = +∞ , lím = +∞
t →1− t2 − 1 t →1− t −1 t →1+ t − 1 t →1+ t − 1
t2
t −1 t2 (t2 − 1) t2 (t + 1)(t − 1) t2 (t + 1)
m = lím = lím = lím = lím = 2.
t →1 2t −1 t →1 (2t − 1)(t − 1) t →1 (2t − 1)(t − 1) t →1 2t − 1
t2 −1
t2 2t − 1 t2 (t + 1) − 2(2t − 1) t3 + t2 − 4t + 2
b = lím −2 2 = lím = lím
t →1 t − 1 t − 1 t →1 t −1
2 t →1 t2 − 1
(t − 1)(t2 + 2t − 2) t2 + 2t − 2 1
= lím = lím = .
t →1 (t − 1)(t + 1) t →1 t +1 2
Por lo tanto y = 2x + 1
2
es una asíntota oblicua de la curva cuando t → 1 .
José Luis Quintero 11
Cálculo III Tema 1. Funciones vectoriales de una variable real
II. Información de r'(t):
a. Cálculo de r'(t):
2(t2 − 1) − (2t − 1)2t 2t2 − 2 − 4t2 + 2t −2t2 + 2t − 2 −2(t2 − t + 1)
x '(t) = = = = .
(t2 − 1)2 (t2 − 1)2 (t2 − 1)2 (t2 − 1)2
2t(t − 1) − t2 2t2 − 2t − t2 t2 − 2t t(t − 2)
y '(t) = = = = .
(t − 1)
2
(t − 1) 2
(t − 1)2
(t − 1)2
Por lo tanto,
−2(t2 − t + 1) t(t − 2)
r '(t) = , .
(t2 − 1)2 (t − 1)2
b. Dominio: R − {−1,1}
c. Tangentes y puntos cuspidales:
• Verticales: x '(t) < 0 ∀t ∈ D(r). La curva no tiene tangentes verticales.
• Horizontales: y '(t) = 0 ⇒ t = 0 ó t = 2 , x '(0) = −2 , x '(2) = − 23 . La curva
tiene una tangente horizontal en r(0) = (1, 0) de ecuación y = 0 y otra en
r(2) = (1, 4) de ecuación y = 4 .
• Puntos cuspidales: No tiene.
d. Crecimiento y decrecimiento de r(t) :
t -1 0 1 2
x’ - - - - -
y’ + + - - +
e. Valores máximos y mínimos:
y(0) = 0 es un valor máximo e y(2) = 4 es un valor mínimo para la función y.
III.Gráfico de r(t): (ver figura 4)
Figura 4. Representación gráfica de la curva
José Luis Quintero 12
Cálculo III Tema 1. Funciones vectoriales de una variable real
12. Producto escalar.
12.1. Definición. Dados los vectores x = (x1 , x2 ,..., xn ) y y = (y1 , y2 ,..., yn ) se define el
producto escalar x • y, por
n
x • y = x1y1 + ... + xnyn =
∑
i =1
xi yi .
12.2. Propiedades.
a. x • y = y • x
b. (λx) • y = λ(x • y)
c. x • (y + z) = x • y + x • z
d. x • x ≥ 0
e. x • x = 0 ⇔ x = 0
12.3. Observación. x•x = x .
13. Producto vectorial.
13.1. Definición. Para cualquier par de vectores A y B de R3 el producto vectorial de A por B
se define como
A × B = (a2b3 − a3b2 , a3b1 − a1b3 , a1b2 − a2b1 ) .
13.2. Observaciones.
a. Si A o B es el vector nulo, entonces es claro que A × B = 0
b. Si A y B son vectores paralelos entonces A × B = 0
13.3. Propiedades.
Sean A, B y C vectores de R3 y λ un número real.
a. A × A = 0
b. 0 × A = A × 0 = 0
c. B × A = − A × B
d. A × (B + C) = A × B + A × C
e. (λA) × B = λ(A × B) = A × (λB)
14. Vectores ortogonales. Proyección ortogonal.
14.1. Definición. Un vector x es ortogonal (perpendicular) al vector y si y sólo si
x+y = x−y .
14.2. Observación. Si dos vectores x, y son perpendiculares se usará la notación x ⊥ y .
14.3. TEOREMA. Dos vectores x, y son ortogonales si y sólo si x • y = 0 .
14.4. Proyección ortogonal. Dados los vectores fijos a y b no nulos es posible proyectar el
vector a sobre el vector b y sobre un vector fijo w’ perpendicular a b como se indica en
la figura 5. De acuerdo a la figura 5, a = v + w , donde v es la proyección de a sobre b
y w es la proyección ortogonal de a sobre b.
14.5. Propiedades de la proyección de un vector.
a. v = λb para algún escalar λ (v es paralelo a b)
b. a = v + w
c. w • b = 0
José Luis Quintero 13
Cálculo III Tema 1. Funciones vectoriales de una variable real
Figura 5. Proyección del vector a sobre el vector b
14.6. Cálculo de la proyección de un vector sobre otro.
a • b = (w + v) • b = w • b + v • b = 0 + v • b = v • b = (λb) • b = λ(b • b)
De lo anterior se tiene que
a•b
λ= .
b•b
La proyección de a sobre b se puede escribir como
a•b
proyba = b = comp(proy a)b .
b
b2
El vector
a•b
w = a − λb = a − b
b2
es ortogonal a b para cualquier vector a (ver figuras 6 y 7).
Figura 6. Proyección del vector a sobre el vector b con escalar positivo
José Luis Quintero 14
Cálculo III Tema 1. Funciones vectoriales de una variable real
15. Formas de la ecuación del plano.
15.1. Fundamentos. Para hallar la ecuación de un plano es necesario conocer un punto y
dos vectores directores del mismo. Un plano, (obtenido a partir de un punto
(x0,y0,z0) y dos vectores v = (v1 , v2 , v3 ) y w = (w1 , w2 , w3 ) ), se puede expresar de las
siguientes formas:
a. Ecuación vectorial. (x, y, z) = (x0 , y0 , z0 ) + t(v1 , v2 , v3 ) + s(w1 , w2 , w3 ) , t, s ∈ R
x = x0 + tv1 + sw1
b. Ecuaciones paramétricas. y = y0 + tv2 + sw2 , t, s ∈ R
z = z + tv + sw
0 3 3
c. Ecuación cartesiana, general o implícita. Ax + By + Cz + D = 0
x y z
d. Ecuación segmentaria. + + =1
a b c
15.2. Observaciones. Los valores a, b y c se denominan, respectivamente, abscisa,
ordenada y cota en el origen. Un plano también se puede hallar sabiendo un punto y
solo un vector, siempre y cuando ese vector sea perpendicular al plano (llamado
vector normal), las coordenadas de ese vector coinciden con los coeficientes A, B, C
del plano; para hallar el término independiente D del plano, sólo hay que sustituir las
coordenadas del punto dado y despejar D.
15.3. Ejemplo ilustrativo 14. Halle la ecuación del plano que contiene a los puntos (1,2,3),
(0,1,1) y (−2,3, 2)
Solución.
Vectores directores que generan el plano:
u = (1,2, 3) − (0,1,1) = (1,1, 2) ; v = (1, 2, 3) − (−2, 3, 2) = (3, −1,1).
Vector normal del plano:
i j k
u× v = 1 1 2 = (3,5, −4) .
3 −1 1
Si D = −(1.3 + 2.5 − 4.3) = −1 , entonces la ecuación del plano será 3x + 5y − 4z = 1 .
15.4. Observaciones:
• Dos planos son paralelos si sus vectores normales son paralelos
• Dos planos son perpendiculares si sus vectores normales son perpendiculares
• Una recta es paralela a un plano si los vectores director de la recta y normal del
plano son ortogonales
• Una recta es perpendicular a un plano si los vectores director de la recta y normal
del plano son paralelos
16. Sistema de coordenadas móvil.
16.1. Vector tangente unitario. En cada punto de la curva C definida por r(t) se define el
vector tangente unitario T(t), como
r '(t)
T(t) = si r '(t) ≠ 0 .
r '(t)
16.2. Observación. Puesto que T(t) = 1 entonces T(t) • T '(t) = 0 , es decir T '(t) es
ortogonal a T(t) . Con base en lo anterior se dan las dos definiciones que siguen:
José Luis Quintero 15
Cálculo III Tema 1. Funciones vectoriales de una variable real
16.3. Vector normal unitario. En cada punto de la curva r(t) se define el vector normal
unitario como
T '(t)
N(t) = si T '(t) ≠ 0 .
T '(t)
16.4. Observación. N(t) apunta hacia la parte cóncava de la curva.
16.5. Recta normal. Se define la recta normal a la curva en el punto r(t0 ) , donde
T(t0 ) ≠ 0 , como la recta que tiene vector director T '(t0 ) . Su ecuación será en
consecuencia RN (α) = r(t0 ) + αT '(t0 ) con α ∈ R .
16.6. Vector binormal. En cada punto de la curva r(t) se define el vector binormal B(t)
unitario y perpendicular a T(t) y a N(t), por lo tanto debe ser B(t) = T(t) × N(t) .
16.7. Observación. Los vectores T, N y B conforman en cada punto de la curva un conjunto
de vectores mutuamente ortogonales; no son más que un sistema de coordenadas
móvil que se desplaza a lo largo de la curva r(t) y reciben el nombre de triedro móvil.
16.8. Ejemplo ilustrativo 15. Demuestre que
r '(t) × r ''(t)
B(t) = .
r '(t) × r ''(t)
Solución.
Se tiene que r '(t) = s '(t)T(t) , de donde
r ''(t) = s ''(t)T(t) + s '(t)T '(t) = s ''(t)T(t) + s '(t) T '(t) N(t) ,
luego
r '(t) × r ''(t) = s '(t)T(t) × (s ''(t)T(t) + s '(t) T '(t) N(t))
= s '(t)s ''(t)(T(t) × T(t)) + (s '(t))2 T '(t) (T(t) × N(t)) = (s '(t))2 T '(t) B(t)
Si r '(t) × r ''(t) = (s '(t))2 T '(t) , entonces
r '(t) × r ''(t)
B(t) = .
r '(t) × r ''(t)
Por otro lado, se puede ver también que N(t) = B(t) × T(t) .
16.9. Ejemplo ilustrativo 16. Calcule los vectores T, N y B para la curva r(t) = (t, t2 , t3 ) .
Solución.
r '(t) (1, 2t, 3t2 )
r '(t) = (1,2t,3t2 ) , r ''(t) = (0, 2, 6t) , T(t) = = .
r '(t) 1 + 4t2 + 9t 4
i j k
r '(t) × r ''(t) = 1 2t 3t2 = (6t2 , −6t,2) ,
0 2 6t
r '(t) × r ''(t) (3t2 , −3t,1)
B(t) = = .
r '(t) × r ''(t) 9t 4 + 9t2 + 1
i j k
1 1
N(t) = B(t) × T(t) = . 3t 2
−3t 1
9t 4 + 9t2 + 1 9t 4 + 4t2 + 1
1 2t 3t2
1
= (−9t3 − 2t,1 − 9t 4 , 6t3 + 3t)
81t + 117t + 54t + 13t + 1
8 6 4 2
José Luis Quintero 16
Cálculo III Tema 1. Funciones vectoriales de una variable real
16.10. Observación. Sea C una curva en R 3 definida como la imagen de r(t). En cada punto
r(t0 ) de la curva los vectores T, N y B (triedro de Frenet) definen tres planos
mutuamente perpendiculares.
16.11. Plano osculador. El plano osculador es el plano generado por T y N, luego su
vector normal es B. Su ecuación es B(t0 ) • ((x, y, z) − r(t0 )) = 0 (ver figura 7).
16.12. Plano rectificante. El plano rectificante es el plano generado por T y B, luego su
vector normal es N. Su ecuación es N(t0 ) • ((x, y, z) − r(t0 )) = 0 (ver figura 7).
16.13. Plano normal. El plano normal es el plano generado por B y N, luego su vector
normal es T. Su ecuación es T(t0 ) • ((x, y, z) − r(t0 )) = 0 (ver figura 7).
Figura 7. Sistema de coordenadas móvil
16.14. Ejemplo ilustrativo 17. Calcule el plano normal a la curva r(t) = (3t − t3 , 3t2 , 3t + t3 )
en el punto (2,3,4).
Solución.
Se debe hallar el valor de t tal que r(t) = (2, 3, 4) . Para obtenerlo se resuelve el sistema
3t − t3 = 2
3t = 3 ⇒ t = 1 .
2
3t + t = 4
3
1
r '(t) = (3 − 3t2 , 6t, 3 + 3t2 ) , r '(1) = (0, 6, 6) , r '(1) = 72 = 6 2 , T(1) = (0,1,1).
2
La ecuación del plano normal en el punto indicado es:
1
(0,1,1) • (x − 2, y − 3, z − 4) = 0 ⇒ y − 3 + z − 4 = 0 ⇒ y + z − 7 = 0
2
17. Curvatura.
17.1. Definición. La curvatura es un concepto importante en el estudio de la geometría
diferencial y del movimiento curvilíneo. Algunas definiciones de la curvatura:
• Es la medida de la tendencia de una curva a desviarse de la línea recta
• Es la medida de cómo la curva se escapa de la recta tangente
• Es una medida de cuánto se dobla una curva
• Es una medida de cuán curva es una curva
• Es una medida de qué tan rápido cambia la curva de dirección en un punto
José Luis Quintero 17
Cálculo III Tema 1. Funciones vectoriales de una variable real
• Es la magnitud de la razón de cambio del vector tangente unitario con respecto a la
longitud de arco
De acuerdo a la última definición se tiene que
dT / dt T '(t) T '(t)
κ(t) = = = .
ds / dt s '(t) r '(t)
17.2. Ejemplo ilustrativo 18. Demuestre que
r '(t) × r ''(t)
κ(t) = 3
.
r '(t)
Solución.
Se tiene
T '(t) = T '(t) N(t) = κ(t)s '(t)N(t) , r '(t) = s '(t)T(t) ,
r ''(t) = s ''(t)T(t) + s '(t)T '(t) = s ''(t)T(t) + [s '(t)]2 κ(t)N(t)
r '(t) × r ''(t) = s '(t)T(t) × [s ''(t)T(t) + [s '(t)]2 κ(t)N(t)]
= s '(t)s ''(t)(T(t) × T(t)) + [s '(t)]3 κ(t)(T(t) × N(t)) = [s '(t)]3 κ(t)B(t)
Luego
3
r '(t) × r ''(t) = [s '(t)]3 k(t) = r '(t) k(t) .
Por lo tanto
r '(t) × r ''(t)
κ(t) = 3
.
r '(t)
17.3. Definición. Sea y = f(x) , se define la curvatura como la tasa a la que la curva se
dobla respecto de la pendiente (tangente del ángulo de inclinación) de la recta
tangente.
De acuerdo a la definición κ(x) = dθ / ds . Se tiene que
dθ dθ dx dθ / dx
= . = .
ds dx ds ds / dx
Ahora bien
dθ f ''(x) ds
tg(θ) = f '(x) ⇒ θ = arctg(f '(x)) ⇒ = , = 1 + [f '(x)]2 .
dx 1 + [f '(x)]2 dx
De modo que
f ''(x)
κ(x) =
.
(1 + [f '(x)]2 )3 2
Sea r(t) = (x(t), y(t)) , se sabe de cursos anteriores de Cálculo que
dy dy / dt y '(t)
f '(x) = = =
dx dx / dt x '(t)
y ''(t)x '(t) − y '(t)x ''(t)
d dy
d2 y ( dx ) (x '(t))2 y ''(t)x '(t) − y '(t)x ''(t)
f ''(x) = 2
= dt
dx
= = .
dx dt
x '(t) (x '(t))3
De modo que
y ''(t)x '(t) − y '(t)x ''(t)
(x '(t))3 y ''(t)x '(t) − y '(t)x ''(t)
κ(t) = = .
((x '(t)) )
32 32
( ) + (y '(t))2
2 2
y '(t)
1 + x '(t)
José Luis Quintero 18
Cálculo III Tema 1. Funciones vectoriales de una variable real
17.4. Observación. La curvatura es independiente de la parametrización que se use.
17.5. Curvatura para una recta.
La ecuación vectorial de una recta viene dada por r(t) = P0 + tv . De modo que r '(t) = v
y r ''(t) = 0 , luego para una recta κ(t) = 0 .
17.6. Curvatura para una circunferencia.
Sea r(t) = (h + a cos(t),k + asen(t)) la función vectorial cuya curva es una circunferencia
centrada en el punto (h,k) y de radio a. Entonces se tiene que:
x(t) = h + a cos(t) , x '(t) = −asen(t) , x ''(t) = −a cos(t)
y(t) = k + asen(t) , y '(t) = a cos(t) , y ''(t) = −asen(t)
Por lo tanto
y ''(t)x '(t) − y '(t)x ''(t) a2sen2 (t) + a2 cos2 (t) a2 1
κ(t) = = = = .
((x '(t)) ) (a sen (t) + a )
32 32
2
+ (y '(t))2 2 2 2 2
cos (t) a3 a
18. Componentes tangencial y normal de la aceleración.
18.1. Definición. Si el parámetro t es el tiempo entonces r ''(t) es la aceleración de una
partícula con posición instantánea r(t). Los coeficientes de los vectores unitarios T(t) y
N(t) son respectivamente las componentes tangencial y normal de la aceleración.
18.2. Observación. Como
r ''(t) = s ''(t)T(t) + s '(t) T '(t) N(t) = s ''(t)T(t) + (s '(t))2 κ(t)N(t)
entonces la componente tangencial de la aceleración viene dada por s ''(t) (derivada
de la función rapidez) y la componente normal de la aceleración es (s '(t))2 κ(t)
(producto de la rapidez al cuadrado por la curvatura). Si se proyecta el vector r ''(t)
sobre los vectores T(t) y N(t) se tiene
r ''(t) = comp(proy T(t)r''(t))T(t) + comp(proyN(t)r''(t))N(t) .
De modo que
r ''(t) = r ''(t) • T(t) T(t) + r ''(t) • N(t) N(t) ,
donde r ''• T y r ''• N son las componentes tangencial y normal de la aceleración
respectivamente.
18.3. Ejemplo ilustrativo 19. Se definen c T y cN como las componentes tangencial y
normal de la aceleración respectivamente. Demuestre que
r '(t) • r ''(t) r '(t) × r ''(t)
c T (t) = y cN (t) = .
r '(t) r '(t)
Solución.
Se sabe que c T (t) = s ''(t) = r''(t) • T(t) , de modo que
r'(t) r '(t) • r ''(t)
c T (t) = r''(t) • = .
r'(t) r '(t)
Se sabe que cN (t) = (s '(t))2 κ(t) , de modo que
2 r '(t) × r ''(t) r '(t) × r ''(t)
cN (t) = (s '(t))2 κ(t) = r '(t) 3
=
r '(t) r '(t)
José Luis Quintero 19
Cálculo III Tema 1. Funciones vectoriales de una variable real
19. Circunferencia osculatriz y centro de curvatura.
19.1. Definición. Se define la circunferencia osculatriz a una curva C en un punto
P = r(t0 ) , como la circunferencia que pasa por P y tiene igual curvatura que la curva.
19.2. Observación. La curvatura de una circunferencia de radio a es κ = 1
a
, de donde el
radio de la circunferencia osculatriz debe ser a = 1
κ
.
19.3. Centro de curvatura. El centro de curvatura, o centro de la circunferencia osculatriz
está en la dirección del vector normal N(t) y está dado por C(t0 ) = r(t0 ) + aN(t0 ) .
19.4. Ejemplo ilustrativo 20. Halle la circunferencia osculatriz al gráfico de y = x2 para
x = 1 y para x = 0 .
Solución.
2 2
κ(x) = = .
(1 + [2x] ) 2 32
(1 + 4x2 )3 /2
Una parametrización para la curva es r(t) = (t, t2 ) . De modo que:
(1, 2t) 4t 1
T(t) = ⇒ T '(t) = − (1,2t) + (0, 2)
1 + 4t 2
(1 + 4t ) 1 + 4t
2 2
1 + 4t2
1 (−4t, 2) (−2t,1)
⇒ T '(t) = (−4t, 2) ⇒ N(t) = =
(1 + 4t ) 1 + 4t
2 2
16t + 4
2
4t2 + 1
2 5 5 (−2,1) 5 5 (−2,1) 7
t = 1 ⇒ κ(1) = ⇒ a(1) =
⇒ N(1) = ⇒ C(1) = (1,1) + . = −4,
5 5 2 5 2 5 2
1 1 1
t = 0 ⇒ κ(0) = 2 ⇒ a(0) = ⇒ N(0) = (0,1) ⇒ C(0) = (0, 0) + .(0,1) = 0,
2 2 2
Por lo tanto
2 2
7 125 1 1
t = 1 ⇒ ( x + 4) + y − =
2
; t = 0 ⇒ x2 + y − = .
2 4 2 4
20. Torsión.
20.1. Curva plana. Se denomina curva plana al recorrido de una función vectorial tal que
todos sus puntos se encuentran en un mismo plano.
20.2. Curva alabeada. Se denomina curva alabeada a aquella curva tal que no todos sus
puntos están en un mismo plano.
20.3. Torsión. La torsión también es un concepto importante en el estudio de la geometría
diferencial y del movimiento curvilíneo. Algunas definiciones de la torsión:
• Caracteriza la forma en que una curva alabeada dada difiere de una curva plana
• Caracteriza la velocidad con que la curva se separa de su plano osculador
• Es una medida del torcimiento de la curva respecto al plano osculador
• Es una medida de cuanto se aleja la curva del plano osculador
Se tiene entonces que
dB / dt B '(t) B '(t)
τ(t) = = = .
ds / dt s '(t) r '(t)
20.4. Observaciones de interés.
• El vector B '(t) es paralelo a N(t)
• τ(t) = 0 ∀t si y sólo si la curva es plana y el plano que la contiene es el plano
osculador
José Luis Quintero 20
Cálculo III Tema 1. Funciones vectoriales de una variable real
• τ(t) = 0 ∀t ⇒ B '(t) = 0 de modo que B(t) = (b1 ,b2 ,b3 ) , lo que significa que el plano
osculador es el mismo siempre
21. Fórmulas de Frenet.
21.1. Fundamentos. A continuación se tienen las siguientes fórmulas:
B '(t) = −τ(t)s '(t)N(t)
T '(t) = κ(t)s '(t)N(t)
N '(t) = τ(t)s '(t)B(t) − κ(t)s '(t)T(t)
que se conocen con el nombre de fórmulas de Frenet. Con base en estas fórmulas se
deduce una expresión para la torsión en función de cualquier parámetro:
(r '(t) × r ''(t)) • r '''(t)
τ(t) = 2
si r '(t) × r ''(t) ≠ 0 .
r '(t) × r ''(t)
21.2. Ejemplo ilustrativo 21. Dada la curva definida por r(t) = (t3 , t3 + t2 , −t3 + t) , calcule los
puntos en los cuales la torsión es cero.
Solución.
r '(t) = (3t2 , 3t2 + 2t, −3t2 + 1) ; r ''(t) = (6t, 6t + 2, −6t) ; r '''(t) = (6, 6, −6)
i j k
r '(t) × r ''(t) = 3t 2
3t + 2t −3t2 + 1 = (−6t2 − 6t − 2, 6t, −6t2 )
2
6t 6t + 2 −6t
(r '(t) × r ''(t)) • r '''(t) (−6t2 − 6t − 2, 6t, −6t2 ) • (6, 6, −6) 12
τ(t) = 2
= 2
=− 2
.
r '(t) × r ''(t) r '(t) × r ''(t) r '(t) × r ''(t)
De modo que no hay valor de t para el cual la torsión sea cero ( τ = 0 ).
21.3. Ejemplo ilustrativo 22. La posición de una partícula es
r(t) = (1 + sen(t), cos(t),2 cos(t) − sen(t))
a. Demuestre que la partícula se mueve en un plano.
b. Encuentre la ecuación del plano.
Solución.
a. Se debe probar que τ(t) = 0 :
r '(t) = (cos(t), −sen(t), −2sen(t) − cos(t)) , r ''(t) = (−sen(t), − cos(t), −2 cos(t) + sen(t))
r '''(t) = (− cos(t), sen(t),2sen(t) + cos(t))
i j k
r '(t) × r ''(t) = cos(t) −sen(t) −2sen(t) − cos(t) = (−1, 2, −1)
−sen(t) − cos(t) −2 cos(t) + sen(t)
(r '(t) × r ''(t)) • r '''(t) = (−1, 2, −1) • (− cos(t), sen(t), 2sen(t) + cos(t)) = 0
b. Si se toman tres puntos: r(0) = (1,1, 2) ; r(π / 2) = (2, 0, −1) ; r(π) = (1, −1, −2)
El vector normal del plano será
i j k
−1 1 3 = (−2, 4, −2) .
0 2 4
Se tiene
(−2, 4, −2) • (x − 1, y − 1, z − 2) = 0 ⇒ −2x + 2 + 4y − 4 − 2z + 4 = 0 ⇒ x − 2y + z = 1 .
José Luis Quintero 21
Cálculo III Tema 1. Funciones vectoriales de una variable real
22. Sistema de coordenadas polares.
22.1. Fundamentos. El sistema de coordenadas rectangulares que se ha estado usando
hasta ahora, no es más que un algoritmo que permite establecer una correspondencia
entre los puntos del plano y los pares de números reales. Sin embargo, esta no es la
única manera en que se puede establecer una correspondencia de este tipo. Cada punto
P de R 2 con coordenadas rectangulares (x,y) se puede asociar con el par (r, θ) de la
siguiente forma: Se traza una recta (eje polar) que pase por P y por el origen de
coordenadas (llamado ahora polo), la cual formará un ángulo θ , medido en radianes,
con la dirección positiva del eje X. Esta recta puede verse como la rotación de un ángulo
θ del eje X. El eje X corresponde a θ = 0 . Se asigna a P las coordenadas polares r
(coordenada radial) que es la distancia dirigida de P al polo y θ (coordenada angular)
(ver figura 8). De esta forma, dado un punto P, la relación entre sus coordenadas
cartesianas (x,y) y sus coordenadas polares, viene dada por:
x = r cos(θ) r = ± x2 + y2
⇒ .
y = rsen(θ) θ = arctg(y / x) , x ≠ 0
Figura 8. Relaciones cartesianas - polares
22.2. Ejemplo ilustrativo 23. Encuentre las coordenadas cartesianas del punto (3, π) en
coordenadas polares.
Solución.
x = 3 cos(π) = −3 ; y = 3sen(π) = 0 .
22.3. Ejemplo ilustrativo 24. Encuentre las coordenadas polares del punto (1,1) en
coordenadas cartesianas.
Solución.
r = ± 12 + 12 = ± 2 ; θ = arctg(1 / 1) = π 4 . Si θ = π 4 , r = 2 .
Entonces se puede apreciar que las coordenadas polares del punto son ( 2, 4π ) .
22.4. Observación. La representación polar de un punto en cartesianas no es única. Si un
punto tiene coordenadas polares (r, θ) , también son coordenadas del mismo punto
(r, θ + 2kπ) o (−r, θ + (2k + 1)π) , (k ∈ Z) . Por ejemplo, para k = 0 se tiene que las
coordenadas (r, θ) y (−r, θ + π) representan el mismo punto P.
22.5. Ejemplo ilustrativo 25. Las coordenadas polares del punto (1,1), además de ( 2, 4π )
también pueden ser (− 2, 54π ) , (− 2, − 34π ) .
José Luis Quintero 22
Cálculo III Tema 1. Funciones vectoriales de una variable real
23. Representaciones de una curva en coordenadas polares.
23.1. Fundamentos. Como se sabe, un punto tiene infinitas representaciones. En tal sentido,
si las coordenadas de P son (r, θ) , también lo son (r, θ + 2kπ) o (−r, θ + (2k + 1)π) con
k ∈ Z , estas dos expresiones se pueden resumir en una sola: (−1)k r = f(θ + kπ) .
23.2. Ejemplo ilustrativo 26. Halle las representaciones de la curva dada por r = 2 cos(2θ) .
Solución.
(−1)k r = 2 cos 2(θ + kπ) = 2 cos(2θ + 2kπ) = 2 cos(2θ) cos(2kπ) − 2sen(2θ)sen(2kπ))
de donde
r = 2 cos(2θ) si k es par, r = −2 cos(2θ) si k es impar .
Las dos ecuaciones representan la misma curva.
24. Ecuación polar de una recta.
24.1. Fundamentos. Sean R una recta cualquiera, I = (r* , ω) las coordenadas polares del
punto intersección entre R y su perpendicular que pasa por el polo y P(r, θ) cualquier
punto sobre la recta R, entonces
r*
cos(θ − ω) = ,
r
de donde se obtiene la ecuación de R en coordenadas polares:
r*
r= .
cos(θ − ω)
24.2. Ejemplo ilustrativo 27. Encuentre la ecuación polar de la recta de ecuación cartesiana
y = x + 1.
Solución.
La ecuación de la recta perpendicular que pasa por el origen es y = −x , siendo el punto
de intersección:
−x + y = 1
⇒ (−1 / 2,1 / 2) .
x+y =0
Sus coordenadas polares son:
r* = (−1 / 2)2 + (1 / 2)2 = 2 2.
Sea ω = arctg(−1) = 3π 4 , luego las coordenadas de este punto son ( 2 2 , 3π 4) .
La ecuación polar de la recta es por lo tanto
2 2
r= .
cos(θ − 34π )
24.3. Casos particulares: (ver figura 9)
a. Recta que pasa por el origen:
y = mx : rsen(θ) = mr cos(θ) ⇒ tg(θ) = m ⇒ θ = arctg(m)
c
b. Recta paralela al eje y: x = c : r* = c; ω = 0; r =
cos(θ)
π b b
c. Recta es paralela al eje x: y = b : r* = b; ω = ; r= =
2 cos(θ − π 2) sen(θ)
José Luis Quintero 23
Cálculo III Tema 1. Funciones vectoriales de una variable real
d. Rectas paralelas: Si la recta R tiene ecuación r* = r cos(θ − ω) entonces la ecuación
de una recta paralela R es r* + d = r cos(θ − ω) donde d es la distancia entre las dos
rectas. Observe que d puede ser positivo o negativo de acuerdo con la posición de la
recta respecto de R
Figura 9. Algunos casos particulares de ecuaciones de rectas en polares
24.4. Ejemplo ilustrativo 28. Determine la ecuación de la recta que pasa por el punto (5,0)
y forma con el eje polar un ángulo α = 5π / 6.
Solución.
Ecuación cartesiana: 3y + 3x − 5 3 = 0 . Recta perpendicular: 3y = 3x.
5 5 5 π
Punto de intersección: , 3 . En coordenadas polares: , .
4 4 2 3
Ecuación polar de la recta:
5
r= 2
.
cos(θ − 3π )
25. Ecuación polar de una circunferencia.
25.1. Fundamentos. Sean (r ', θ ') las coordenadas polares del centro de la circunferencia y a
su radio. Sea P(r, θ) cualquier otro punto de la circunferencia, entonces por el teorema
del coseno se tiene la ecuación general de una circunferencia dada por la expresión
a2 = (r ')2 + r2 − 2rr ' cos(θ − θ ') .
25.2. Casos particulares:
a. Centro en el polo, es decir, (r ', θ ') = (0, θ) , por lo tanto r2 = a2 de donde: r = a o
bien r = −a .
b. Centro sobre el eje x y pasa por el polo, es decir, (r ', θ ') = (a, 0) , por lo tanto su
ecuación es r = 2a cos(θ) .
c. Centro sobre el eje y y pasa por el polo, es decir, (r ', θ ') = (a, 2π ) , por lo tanto su
ecuación es r = 2asen(θ) .
25.3. Ejemplo ilustrativo 29. Una circunferencia que pasa por el polo y por el punto (−1, 6π ) ,
4π
tiene su centro en la recta θ = 3
. Determine su ecuación polar.
Solución.
José Luis Quintero 24
Cálculo III Tema 1. Funciones vectoriales de una variable real
4π
Ecuación de la circunferencia: r = 2a cos(θ − 3
). Como pasa por (−1, 6π ) entonces
−1 = 2a cos( 6π − 4π
3
) = 2a cos( π−68π ) = 2a cos(− 76π ) = 2a cos( 76π ) = − 3a ⇒ a = 3
3
.
4π
Por lo tanto r = 2 3
3
cos(θ − 3
).
26. Distancia en coordenadas polares.
26.1. Distancia entre dos puntos. Sean P1(r1 , θ1 ) y P2 (r2 , θ2 ) dos puntos del plano, dados en
coordenadas polares. Por el teorema del coseno se tiene que
d(P1 ,P2 ) = r12 + r22 − 2r1r2 cos(θ1 − θ2 ) .
26.2. Distancia entre un punto y una recta. Sean R la recta de ecuación polar
r* = r cos(θ − ω) y P(r1 , θ1 ). Sea d la distancia entre las rectas R y R’, donde R’ es
paralela a R y pasa por (r1 , θ1 ) . Su ecuación es por lo tanto r* + d = r cos(θ − ω) . El punto
(r1 , θ1 ) satisface la ecuación de R’. Por lo tanto d(P,R) = d = r1 cos(θ1 − ω) − r * .
26.3. Ejemplo ilustrativo 30. Halle la distancia de la recta r = 2 cos(θ − 4π ) a (2, 3π / 4) .
Solución.
3π π π
d(P,R) = 2 cos − − 2 = 2 cos − 2 = 2.
4 4 2
27. Ecuación polar de una cónica.
27.1. Definición. Una cónica es el conjunto de los puntos P del plano tales que el cociente
de la distancia de P a un punto fijo F (foco) entre la distancia de P a una recta fija D
(directriz) es una constante e (excentricidad):
PF
=e
PD
a. Si e < 1 la cónica es una elipse
b. Si e = 1 la cónica es una parábola
c. Si e > 1 la cónica es una hipérbola
27.2. Observaciones. Suponga que la directriz D tiene ecuación r cos(θ − ω) = r* , las
coordenadas del foco son (ρ, α) , y sea P(r, θ) un punto arbitrario de la cónica, luego:
r2 + ρ2 − 2rρ cos(θ − α) = e r cos(θ − ω) − r* .
En algunos casos la ecuación anterior toma una forma muy simple, por ejemplo, si el
foco coincide con el polo, es decir, F = (0, 0) la ecuación anterior se reduce a:
r = e r cos(θ − ω) − r* .
27.3. Ejemplo ilustrativo 31. Determine la ecuación de la cónica con foco en el polo,
directriz x = 2 y excentricidad e = 2.
Solución.
La directriz es x = 2 , luego r* = 2 , está a la derecha del foco y es paralela al eje
θ = π / 2 por lo tanto su ecuación general es r = er* (1 + e cos(θ)) . Sustituyendo se tiene
4
r= .
1 + 2 cos(θ)
José Luis Quintero 25
Cálculo III Tema 1. Funciones vectoriales de una variable real
27.4. Ejemplo ilustrativo 32. La ecuación de una cónica es
4
r= .
3 + 2sen(θ)
Identifique cónica, dé la ecuación de la directriz asociada al foco en el polo y vértices.
Solución.
4
4
r= = 3
.
3 + 2sen(θ) 1 + 2
3
sen(θ)
Por tanto e = 2 / 3 < 1 , la cónica es una elipse. Se tiene además que
2 4
er* = r * = ⇒ r* = 2 ;
3 3
por lo tanto la ecuación de la directriz es rsen(θ) = 2.
Vértices: r(π / 2) = 4 / 5 ⇒ v1 = (4 / 5, π / 2) ; r(3π / 2) = 4 ⇒ v2 = (4, 3π / 2) .
28. Gráficas en coordenadas polares.
28.1. Fundamentos. Dada una curva definida por la ecuación F(r, θ) = 0 , se define el gráfico
de ella como el conjunto de puntos P(r, θ) que satisfacen la ecuación.
28.2. Tipos de caracoles (o limacon). Sea la ecuación r = a + b cos(θ), a > 0 y b > 0 .
a. 0 < a / b < 1 : Caracol con lazo (ver figura 10)
Figura 10. Gráfica de r=1+2cos(θ)
b. a / b = 1 : Cardioide (forma de corazón) (ver figura 11)
Figura 11. Gráfica de r=1+cos(θ)
José Luis Quintero 26
Cálculo III Tema 1. Funciones vectoriales de una variable real
c. 1 < a / b < 2 : Caracol con hendidura (ver figura 12)
3 +cos(θ)
Figura 12. Gráfica de r= 2
d. 2 ≤ a / b : Caracol convexo (sin hendidura) (ver figura 13)
Figura 13. Gráfica de r=3+cos(θ)
28.3. Tipos de rosas. La gráfica de una ecuación de la forma r = a cos(nθ) es una rosa que
tiene n hojas si n es impar y 2n hojas si n es par. Cada hoja tiene una longitud a. (ver
figuras 14 y 15)
Figura 14. Gráfica de r=2cos(2θ)
José Luis Quintero 27
Cálculo III Tema 1. Funciones vectoriales de una variable real
Figura 15. Gráfica de r=2cos(3θ)
29. Intersección de curvas en coordenadas polares.
29.1. Fundamentos. Dada una curva definida por la ecuación F(r, θ) = 0 , se define el gráfico
de ella como el conjunto de puntos P(r, θ) que satisfacen la ecuación.
29.2. Ejemplo ilustrativo 33. Intersecte las curvas r = 2 cos(2θ) y r = 1 .
Solución.
Figura 16. Intersecciones de las curvas del ejemplo
Se observa de la figura anterior que hay ochos puntos de intersección. Para obtener
todas las soluciones se debe intersectar una a una las representaciones de dichas
curvas, es decir, r = ±1 y r = ±2 cos(2θ) ; lo cual se traduce en resolver los siguientes
dos sistemas:
r =1 r =1
; ,
r = 2 cos(2θ) r = −2 cos(2θ)
cuyas soluciones en el intervalo [0, 2π] son:
π 5π 7π 11π
θ= , , ,
6 6 6 6
del primer sistema y
π 2π 4π 5π
θ= , , ,
3 3 3 3
del segundo sistema.
José Luis Quintero 28
Cálculo III Tema 1. Funciones vectoriales de una variable real
30. Forma paramétrica de una curva en coordenadas polares. Búsqueda de tangentes.
30.1. Forma paramétrica. Sea r = r(θ) la ecuación de una curva en coordenadas polares, se
tiene entonces su forma paramétrica r(θ) = (r(θ) cos(θ),r(θ)sen(θ)) .
30.2. Búsqueda de tangentes:
Tangentes horizontales: r '(θ)sen(θ) + r(θ) cos(θ) = 0 y r '(θ) cos(θ) − r(θ)sen(θ) ≠ 0
Tangentes verticales: r '(θ)sen(θ) + r(θ) cos(θ) ≠ 0 y r '(θ) cos(θ) − r(θ)sen(θ) = 0
30.3. Ejemplo ilustrativo 34. Encuentre los puntos de tangencia horizontal y los puntos de
tangencia vertical a r = 1 + 2 cos(θ) .
Solución.
Figura 17. Gráfica del ejemplo
Puntos de tangencia horizontal:
−2sen2 (θ) + (1 + 2 cos(θ)) cos(θ) = 0 ⇒ −2(1 − cos2 (θ)) + cos(θ) + 2 cos2 (θ) = 0
⇒ −2 + 4 cos2 (θ) + cos(θ) = 0
⇒ θ = 53.62o ,147.46o ,212.53o ,306.38o
y 4sen(θ) cos(θ) + sen(θ) ≠ 0 .
Puntos (2.19,53.62o ) , (−0.69,147.46o ) , (−0.69,212.53o ) , (2.19, 306.38o )
Puntos de tangencia vertical:
−2sen(θ) cos(θ) − (1 + 2 cos(θ))sen(θ) = 0 ⇒ −2sen(θ) cos(θ) − sen(θ) − 2sen(θ) cos(θ) = 0
⇒ 4sen(θ) cos(θ) + sen(θ) = 0
⇒ sen(θ)(4 cos(θ) + 1) = 0
⇒ θ = 0o ,180o ,104.47o , 255.52o
y 4 cos2 (θ) + cos(θ) − 2 ≠ 0 .
Puntos (3, 0) , (−1,180o ) , (0.5,104.47o ) , (0.5,255.52o ) .
30.4. TEOREMA. Si m es la pendiente de la recta tangente a la gráfica de r(θ) en el punto
(r(θ), θ), entonces
r '(θ)sen(θ) + r(θ) cos(θ)
m= .
r '(θ) cos(θ) − r(θ)sen(θ)
Demostración.
Se sabe que
dy dy / dθ r '(θ)sen(θ) + r(θ) cos(θ)
m= = =
dx dx / dθ r '(θ) cos(θ) − r(θ)sen(θ)
considerando la forma paramétrica en coordenadas polares vista anteriormente.
José Luis Quintero 29
Cálculo III Tema 1. Funciones vectoriales de una variable real
31. Longitud de arco y área en coordenadas polares.
31.1. Longitud de arco. Sea r(θ) = (r(θ) cos(θ),r(θ)sen(θ)) , la forma paramétrica de una
curva dada en coordenadas polares. Se tiene:
r' (θ) = (r '(θ) cos(θ) − r(θ)sen(θ),r '(θ)sen(θ) + r(θ) cos(θ)) .
De modo que
β β
L=
∫
α
(r '(θ) cos(θ) − r(θ)sen(θ)) + (r '(θ)sen(θ) + r(θ) cos(θ)) dθ =
2 2
∫
α
(r(θ))2 + (r '(θ))2 dθ .
31.2. Ejemplo ilustrativo 35. Calcule la longitud de arco de de la cardioide r = 2(1 + cos(θ)).
Solución.
π
L=2
∫ 0
(−2sen(θ))2 + 4(1 + cos(θ))2 dθ = 16.
31.3. Área (TEOREMA). Sea R la región limitada por las rectas θ = α y θ = β y la curva cuya
ecuación es r(θ) , donde r es continua y no negativa en el intervalo cerrado [α, β] .
Entonces, si A unidades cuadradas es el área de la región R,
β
∫
1
A= [r(θ)]2 dθ .
2
α
31.4. Ejemplo ilustrativo 36. Calcule el área de la región limitada por la cardioide de
ecuación polar r = 2(1 + cos(θ)).
Solución.
π
A=2
∫
0
1
2
(2 + 2 cos(θ))2 dθ = 6π .
José Luis Quintero 30
Vous aimerez peut-être aussi
- Taller S08 DinamicaDocument2 pagesTaller S08 DinamicaJuan Rodrigo100% (1)
- Unidad 3 Funciones Vectoriales de Una Variable RealDocument49 pagesUnidad 3 Funciones Vectoriales de Una Variable RealNoel Vicente Santy100% (1)
- CT Mate 4 Sec IV Bim 2019Document23 pagesCT Mate 4 Sec IV Bim 2019Keytel Tarmeño QuispePas encore d'évaluation
- Falsilla de WulfDocument10 pagesFalsilla de Wulfjosemenatoro100% (1)
- 04 - Funciones Vectoriales PDFDocument10 pages04 - Funciones Vectoriales PDFVicky ZacaríasPas encore d'évaluation
- 01 PD (Eeaa) PDFDocument18 pages01 PD (Eeaa) PDFBrenda BogarinPas encore d'évaluation
- Unidad 3Document48 pagesUnidad 3Isabel Perez ArellanoPas encore d'évaluation
- Libro Cálculo Multivariable Capítulo IVDocument50 pagesLibro Cálculo Multivariable Capítulo IVAnthony Carranza AnguloPas encore d'évaluation
- Cálculo II TP1 2020Document13 pagesCálculo II TP1 2020felcro999 CabralPas encore d'évaluation
- Funciones VectorialesDocument9 pagesFunciones VectorialesFATIMA YAIDALY TUZ POOTPas encore d'évaluation
- Notas Calculo III PDFDocument13 pagesNotas Calculo III PDFIsaac Hasse ArmengolPas encore d'évaluation
- Funciones VectorialesDocument11 pagesFunciones VectorialesChristian JesusPas encore d'évaluation
- PF3. - Portafolio Unidad III. - Funciones VectorialesDocument52 pagesPF3. - Portafolio Unidad III. - Funciones VectorialesGuillermo ArtezánPas encore d'évaluation
- Clase 4Document18 pagesClase 4Ricardo Molina BeltránPas encore d'évaluation
- Clase 17. Funciones Vectoriales y Curvas Paramétricas en El EspacioDocument5 pagesClase 17. Funciones Vectoriales y Curvas Paramétricas en El EspacioJuanpablo bolañosPas encore d'évaluation
- Integrales de Linea y SuperficieDocument8 pagesIntegrales de Linea y SuperficieRodil Huillca AnccoPas encore d'évaluation
- N ss11 Funciones Vectoriales - BookDocument20 pagesN ss11 Funciones Vectoriales - Bookanon_919887327Pas encore d'évaluation
- Clase20 PDFDocument6 pagesClase20 PDFcarlos jose peckermanPas encore d'évaluation
- Cal Vectc1Document12 pagesCal Vectc1Alejandro VazquezPas encore d'évaluation
- Funciones VectorialesDocument5 pagesFunciones VectorialesSanthier Mosquera Ampudia100% (1)
- Sesión 5.1-Funciones VectorialesDocument18 pagesSesión 5.1-Funciones VectorialesJose Luis AlvarezPas encore d'évaluation
- Unidad 3 Calculo VectorialDocument39 pagesUnidad 3 Calculo VectorialJosé Suárez100% (1)
- Continuacion Integral Trayectoria Vectorial BDocument5 pagesContinuacion Integral Trayectoria Vectorial BJhoanna BarreraPas encore d'évaluation
- Guía01 - Derivada Implícita, Inversa, ParamétricaDocument2 pagesGuía01 - Derivada Implícita, Inversa, Paramétricarsebastianj86Pas encore d'évaluation
- Clase 1 Funciones VectorialesDocument10 pagesClase 1 Funciones Vectorialesyisela agrasoPas encore d'évaluation
- Tarea Calculo II ResumenDocument2 pagesTarea Calculo II ResumenXIOMARA ISABEL AYQUIPA JIHUAÑAPas encore d'évaluation
- 3 Funciones Vectorial de Una Variable RealDocument3 pages3 Funciones Vectorial de Una Variable RealCarlos E. M. CernaPas encore d'évaluation
- Integrales de LineaDocument26 pagesIntegrales de Lineasofiaq07Pas encore d'évaluation
- 3 Funciones Vectoriales de Una Variable RealDocument22 pages3 Funciones Vectoriales de Una Variable RealOswaldo CázaresPas encore d'évaluation
- 01 FuncionesDocument11 pages01 FuncionesRoberto LamasPas encore d'évaluation
- Funciones VectorialesDocument21 pagesFunciones VectorialesJairo MineroPas encore d'évaluation
- Teoria I-19Document26 pagesTeoria I-19Juan AmbroggioPas encore d'évaluation
- Deriv e IntDocument6 pagesDeriv e IntJovePas encore d'évaluation
- Cap 3.1Document8 pagesCap 3.1Ariel Diaz JaldinPas encore d'évaluation
- Definición de Funciones VectorialesDocument3 pagesDefinición de Funciones VectorialesJavier EstevesPas encore d'évaluation
- Tarea 1 MultivariadoDocument2 pagesTarea 1 MultivariadoGerson Daniel Galeano GiraldoPas encore d'évaluation
- Funciones 2Document11 pagesFunciones 2gabriela VILLEGASPas encore d'évaluation
- CIII 01 Función Vector de RealDocument7 pagesCIII 01 Función Vector de RealJesús IniestaPas encore d'évaluation
- Ensayo Funciones VectorialesDocument11 pagesEnsayo Funciones VectorialesmicoPas encore d'évaluation
- Recta Parametrica 1Document9 pagesRecta Parametrica 1Alejandro Hernandez PinedaPas encore d'évaluation
- Taller 3-Cálculo VectorialDocument3 pagesTaller 3-Cálculo VectorialhernancPas encore d'évaluation
- Análisis Matemático II-1Document16 pagesAnálisis Matemático II-1Avril Bolondi MedinaPas encore d'évaluation
- Funciones Vectoriales de Un Parámetro: Capítulo 2Document31 pagesFunciones Vectoriales de Un Parámetro: Capítulo 2Juan José Gonçalves MendozaPas encore d'évaluation
- Apunte VI Transformaciones Ineales PDFDocument36 pagesApunte VI Transformaciones Ineales PDFGabriela PastranaPas encore d'évaluation
- 03 U Calculo Vec Verano 2023 Est 01Document28 pages03 U Calculo Vec Verano 2023 Est 01Solana LeyverPas encore d'évaluation
- Funciones VectorialesDocument36 pagesFunciones VectorialesAgustina AnitPas encore d'évaluation
- 3.1 Introducci OnDocument13 pages3.1 Introducci OnLeonardo ABPas encore d'évaluation
- 3.3 Derivada de Una Funcion VectorialDocument2 pages3.3 Derivada de Una Funcion VectorialOMAR LOPEZ FELIXPas encore d'évaluation
- Guía Nº1 MAT023 - Transformaciones LinealesDocument5 pagesGuía Nº1 MAT023 - Transformaciones LinealestesteerPas encore d'évaluation
- Unidad 3Document44 pagesUnidad 3ALAN0% (1)
- Funciones Vectoriales CHUNGDocument3 pagesFunciones Vectoriales CHUNGSalma Silenka Salguero PairaPas encore d'évaluation
- Trabajo 1Document6 pagesTrabajo 1sleydermpPas encore d'évaluation
- Guia 5 Mecanica UtemDocument2 pagesGuia 5 Mecanica UtemIsocrack FelizPas encore d'évaluation
- Reporte de InvestigacionDocument7 pagesReporte de Investigacionerik valerioPas encore d'évaluation
- 1 FuncvectlistoDocument6 pages1 FuncvectlistoAlba LemaPas encore d'évaluation
- FuncionesDocument16 pagesFuncionesKazuto Fandubs0% (1)
- Clase 19-IndicacionesDocument5 pagesClase 19-IndicacionesOneal RosalesPas encore d'évaluation
- 2008 - SetiembreDocument1 page2008 - SetiembreEduardo GindelPas encore d'évaluation
- Funcion VectorialDocument24 pagesFuncion VectorialLenin RojasPas encore d'évaluation
- Notas de Clases 4-Transformaciones LinealesDocument36 pagesNotas de Clases 4-Transformaciones LinealesHector SantanaPas encore d'évaluation
- Parcial La Venganza Primer Corte Calculo VectorialDocument1 pageParcial La Venganza Primer Corte Calculo VectorialdocduvanguevaradepaPas encore d'évaluation
- La ecuación general de segundo grado en dos y tres variablesD'EverandLa ecuación general de segundo grado en dos y tres variablesPas encore d'évaluation
- Libro TopografiaDocument16 pagesLibro Topografiacarlos alberto montoyaPas encore d'évaluation
- El Concepto de Grupo y Los Principios Organizadores Be La Estructura Grupal en El Pensamxnto de E. Pichon Riviere.Document29 pagesEl Concepto de Grupo y Los Principios Organizadores Be La Estructura Grupal en El Pensamxnto de E. Pichon Riviere.Lu GaravanoPas encore d'évaluation
- Introduccion Del Lenguaje de La FormaDocument50 pagesIntroduccion Del Lenguaje de La FormaAlex ArizaPas encore d'évaluation
- Solidos GeométricosDocument17 pagesSolidos Geométricosbryan oteroPas encore d'évaluation
- Función CuadráticaDocument30 pagesFunción CuadráticaTamila TerukPas encore d'évaluation
- Copia de Activ Pract GeometriaDocument2 pagesCopia de Activ Pract GeometriaDolores ArancioPas encore d'évaluation
- Cuestionario de CinematicaDocument9 pagesCuestionario de CinematicaSuheidy Maria SanchezPas encore d'évaluation
- Identidades TrigonométricasDocument36 pagesIdentidades TrigonométricasNilo Wilfredo Moreno JaimesPas encore d'évaluation
- EJERCICIO Curva de DescargaDocument6 pagesEJERCICIO Curva de DescargaMarco Rufasto SanchezPas encore d'évaluation
- La Curva CatenariaDocument7 pagesLa Curva CatenariaheribertoparadaPas encore d'évaluation
- Función Sagital, Angulos, Conquista GuatemalaDocument10 pagesFunción Sagital, Angulos, Conquista Guatemalajosuejimenez1908Pas encore d'évaluation
- Transformación de CoordenadasDocument14 pagesTransformación de CoordenadasJulieta VillagraPas encore d'évaluation
- Subsanacion FinalDocument395 pagesSubsanacion FinalJahir MaguiñaPas encore d'évaluation
- La Teoría de TegmarkDocument23 pagesLa Teoría de TegmarkJAVIER DE LUCAS100% (2)
- Libro en DEFENSA DEL CATOLICISMO Lo Que Todo Catolico Debe SaberDocument179 pagesLibro en DEFENSA DEL CATOLICISMO Lo Que Todo Catolico Debe Saberamorareymx100% (3)
- RM VFDocument6 pagesRM VFPaul WeedPas encore d'évaluation
- Lab Fis-5Document10 pagesLab Fis-5Lopez DayanPas encore d'évaluation
- Ensayo Procedimiento en Espacios ConfinadosDocument3 pagesEnsayo Procedimiento en Espacios ConfinadosFelixPas encore d'évaluation
- Propiedades InercialesDocument13 pagesPropiedades InercialesJan Paul Infante LlerenaPas encore d'évaluation
- Prueba de Ecuacion de La Recta 1 Medio 2013Document3 pagesPrueba de Ecuacion de La Recta 1 Medio 2013vondeviaPas encore d'évaluation
- Problemas Algebra LinealDocument46 pagesProblemas Algebra LinealDīeego PadillaPas encore d'évaluation
- Ejercicios de Cinemática (1º Bachillerato)Document7 pagesEjercicios de Cinemática (1º Bachillerato)ramoncinPas encore d'évaluation
- IntegralesDocument8 pagesIntegralesMarco Antonio Cconislla MartinezPas encore d'évaluation
- Funciones Paramétricas y VectorialesDocument76 pagesFunciones Paramétricas y Vectorialescesargabriel_94Pas encore d'évaluation
- Movimiento RectilineoDocument5 pagesMovimiento RectilineoJuan Pablo Rondon IbarraPas encore d'évaluation
- Dibujo. Ing PDFDocument19 pagesDibujo. Ing PDFSdcIvan100% (2)
- PLANIMETRIADocument20 pagesPLANIMETRIArafael rivasPas encore d'évaluation