Vous aimerez peut-être aussi
- Motor AccelerationDocument41 pagesMotor AccelerationFrancisco Andrade100% (1)
- Generator Hydrogen Cooling InfoDocument21 pagesGenerator Hydrogen Cooling InfovarsbsPas encore d'évaluation
- Fault Level CalculationDocument14 pagesFault Level CalculationRajesh PillaiPas encore d'évaluation
- Testing Transformer Differential RelaysDocument64 pagesTesting Transformer Differential RelaysRajesh Bodduna100% (6)
- Handbook FOR Protection Engineers: Mohammed Fasil T 9746988538 0483 2854487Document127 pagesHandbook FOR Protection Engineers: Mohammed Fasil T 9746988538 0483 2854487ts45306Pas encore d'évaluation
- Motor Protection & CharacteristicsDocument16 pagesMotor Protection & CharacteristicsGoogool YPas encore d'évaluation
- Greenhouse Project Interim ReportDocument26 pagesGreenhouse Project Interim ReportMuneek ShahPas encore d'évaluation
- 2 Motor Protection Alstom - No Iet LogoDocument72 pages2 Motor Protection Alstom - No Iet LogosayedmhPas encore d'évaluation
- Sharp BP30C25 - Installation ManualDocument58 pagesSharp BP30C25 - Installation ManualSathish SukumaranPas encore d'évaluation
- Short Circuit CalculationDocument42 pagesShort Circuit Calculationgraduadoesime100% (17)
- Fault Calculation Duhail Annex 1Document13 pagesFault Calculation Duhail Annex 1S Naved MasoodPas encore d'évaluation
- Owner: Vedanta Aluminium Limited, Jharsuguda Contractor: Voltech Operation and Maintanance Services Project: Vedanta Smelter-2Document27 pagesOwner: Vedanta Aluminium Limited, Jharsuguda Contractor: Voltech Operation and Maintanance Services Project: Vedanta Smelter-2mari nPas encore d'évaluation
- Gitlab CICDDocument15 pagesGitlab CICDdeepak bansal100% (1)
- Short CircuitDocument30 pagesShort CircuitRa ArPas encore d'évaluation
- Knowledge is "Real Power": Introduction to Power QualityD'EverandKnowledge is "Real Power": Introduction to Power QualityPas encore d'évaluation
- Generator Protection Settings CalculationsDocument112 pagesGenerator Protection Settings CalculationsPradeep_VashistPas encore d'évaluation
- Principles of Generator Protection BasicsDocument130 pagesPrinciples of Generator Protection BasicsChRis dE LeonPas encore d'évaluation
- Motor ProtectionDocument41 pagesMotor Protectionrjphansalkar100% (3)
- ABB HV Shunt ReactorDocument30 pagesABB HV Shunt Reactortkdrt2166100% (1)
- CT DimensioningDocument12 pagesCT DimensioningwaelateaPas encore d'évaluation
- Book 3 Vol 1Document198 pagesBook 3 Vol 1fgdfgdfPas encore d'évaluation
- Motor ProtectionDocument29 pagesMotor ProtectionSridhar N Nagarjan100% (4)
- 03-Presentation Directional ProtectionDocument37 pages03-Presentation Directional ProtectionRajesh Pillai100% (2)
- BS 7639 Short Circuit Current Calculation in 3phase AC SysteDocument92 pagesBS 7639 Short Circuit Current Calculation in 3phase AC SysteAimee Rachel Dean Rabe100% (2)
- Knowledge ManagementDocument141 pagesKnowledge ManagementKush BajpaiPas encore d'évaluation
- 08-Presentation Distance ProtectionDocument73 pages08-Presentation Distance ProtectionRajesh Pillai100% (3)
- IS 2713.1-3.1980 Lighting Pole PDFDocument36 pagesIS 2713.1-3.1980 Lighting Pole PDFnavneetPas encore d'évaluation
- Medium Voltage Induction Motor Protection and Diagnostics: Yi Du Pinjia Zhang Prof. Thomas G. HabetlerDocument61 pagesMedium Voltage Induction Motor Protection and Diagnostics: Yi Du Pinjia Zhang Prof. Thomas G. HabetlerMansoor AwanPas encore d'évaluation
- 050-Itp For Installation of Air Intake Filter PDFDocument17 pages050-Itp For Installation of Air Intake Filter PDFKöksal PatanPas encore d'évaluation
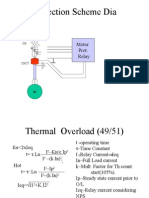
- Protection Scheme Dia: Motor Prot. RelayDocument9 pagesProtection Scheme Dia: Motor Prot. RelayPradipta Kumar MohantyPas encore d'évaluation
- Starting - Large Motor Presentation MAR2016-Rev1Document101 pagesStarting - Large Motor Presentation MAR2016-Rev1royclhorPas encore d'évaluation
- Handbook For Protection EngineersDocument262 pagesHandbook For Protection EngineersAna Raquel Santos86% (22)
- HT Motor ProtectionDocument20 pagesHT Motor Protectionashumanu427Pas encore d'évaluation
- 1 GE Format Motor Protection - Single SessionDocument53 pages1 GE Format Motor Protection - Single SessionDileep GantaPas encore d'évaluation
- Generator ProtectionDocument62 pagesGenerator ProtectionMohammad Ibnul Hossain100% (5)
- Fast Bus Transfer System (BTS)Document9 pagesFast Bus Transfer System (BTS)Amit BiswasPas encore d'évaluation
- AC Motor ProtectionDocument33 pagesAC Motor ProtectionLoretta KimPas encore d'évaluation
- 24 Motor ProtectionDocument32 pages24 Motor Protectionjorge_israell100% (1)
- 01 Introduction Motor ProtectionDocument22 pages01 Introduction Motor ProtectionAndrés Felipe LeonPas encore d'évaluation
- Motor Protection - ABBDocument27 pagesMotor Protection - ABBMub MehPas encore d'évaluation
- 02 - Non-Dir Over CurrentDocument58 pages02 - Non-Dir Over Currenteng_waleed2008Pas encore d'évaluation
- Motor Protection Relay Setting GuideDocument175 pagesMotor Protection Relay Setting GuideThanigaivelan Govindhasamy100% (19)
- Transmission Line Capacity CalculationDocument11 pagesTransmission Line Capacity CalculationRajesh Pillai88% (16)
- Motor ProtectionDocument47 pagesMotor ProtectionKhaled RabeaPas encore d'évaluation
- Motor Protection Training CourseDocument439 pagesMotor Protection Training CourseAlireza Farsani100% (1)
- 10 Motor Protection 1Document51 pages10 Motor Protection 1billymcreal100% (1)
- C9 A.C. Motor ProtectionDocument18 pagesC9 A.C. Motor ProtectionShailesh ChettyPas encore d'évaluation
- AC Motor ProtectionDocument96 pagesAC Motor ProtectionJohn Ladino100% (1)
- Motor Switching and ProtectionDocument30 pagesMotor Switching and ProtectionMohammedSaadaniHassani100% (1)
- L&T Fast Bus Transfer SystemDocument15 pagesL&T Fast Bus Transfer SystemDevi Prasad100% (1)
- 07-Busbar Protection Busbar Protection RFDocument63 pages07-Busbar Protection Busbar Protection RFRajesh Pillai100% (2)
- HV Protection Relays Setting Calculation Rev-4Document58 pagesHV Protection Relays Setting Calculation Rev-4raza23988% (16)
- Generator Protection Calculations SettingsDocument101 pagesGenerator Protection Calculations Settingsrajinipre-160% (5)
- Generator ProtectionDocument22 pagesGenerator ProtectionRajesh Pillai100% (2)
- Protection Relay GuideDocument56 pagesProtection Relay GuideAlan BeechPas encore d'évaluation
- Motor Protection - Customer-FINAL PDFDocument85 pagesMotor Protection - Customer-FINAL PDFJulio LoaizaPas encore d'évaluation
- Relay Setting CalculationDocument6 pagesRelay Setting CalculationSaurabh Kumar Singh100% (6)
- 02 Thermal Motor Protection FunctionDocument36 pages02 Thermal Motor Protection FunctionDavid MendozaPas encore d'évaluation
- API 580 NotesDocument2 pagesAPI 580 Notesmallesh100% (2)
- Motor Protection PrinciplesDocument32 pagesMotor Protection PrincipleschcrrPas encore d'évaluation
- CT Sizing GuidelineDocument26 pagesCT Sizing GuidelineKaushal Pandya100% (3)
- 04-Presentation Analysis of FaultsDocument94 pages04-Presentation Analysis of FaultsRajesh Pillai100% (1)
- IEEE Generator ProtectionDocument40 pagesIEEE Generator ProtectionAndi Uga SismiletostylePas encore d'évaluation
- Generator ProtectionDocument36 pagesGenerator Protectionrohit_me083100% (2)
- 06-Presentation Motor ProtectionDocument47 pages06-Presentation Motor ProtectionshanmuonmPas encore d'évaluation
- TYN 0516 - TYN 816: FeaturesDocument4 pagesTYN 0516 - TYN 816: FeaturesLuna Rebeca Mendoza AlonsoPas encore d'évaluation
- 1 Motor Protection Single SessionDocument27 pages1 Motor Protection Single Sessionmubarakkirko100% (1)
- TYN 682 - TYN 692: FeaturesDocument4 pagesTYN 682 - TYN 692: FeaturesAlejandro BolañosPas encore d'évaluation
- Datasheet - HK - Tyn225 - Tyn1225 - 305987Document4 pagesDatasheet - HK - Tyn225 - Tyn1225 - 30598711. Nguyễn Gia Huy 0318Pas encore d'évaluation
- Ultrafast Soft Recovery Rectifier Diode: APT15D100K 1000V 15ADocument4 pagesUltrafast Soft Recovery Rectifier Diode: APT15D100K 1000V 15AQuickerManPas encore d'évaluation
- TYN 0510 - TYN 1010: FeaturesDocument4 pagesTYN 0510 - TYN 1010: FeaturesSofyan AndikaPas encore d'évaluation
- Tyn 812 PDFDocument5 pagesTyn 812 PDFHernan Vallenilla Rumildo MixPas encore d'évaluation
- FCQ10A03L (Diodo Schottky)Document6 pagesFCQ10A03L (Diodo Schottky)Luis Gamalier ZuritaPas encore d'évaluation
- 2 N 1595Document3 pages2 N 1595gerardo floresPas encore d'évaluation
- Super Fast Recovery Diode: Data SheetDocument7 pagesSuper Fast Recovery Diode: Data SheetYogi SaputraPas encore d'évaluation
- Y38KKE: Fast Turn-Off ThyristorDocument3 pagesY38KKE: Fast Turn-Off ThyristordikaranoPas encore d'évaluation
- Slide 6 Motor ProtecDocument25 pagesSlide 6 Motor ProtecBiniyam DamenePas encore d'évaluation
- Knee Voltage FormulaDocument3 pagesKnee Voltage FormulaRajesh PillaiPas encore d'évaluation
- Basis Principlesof HVDCDocument27 pagesBasis Principlesof HVDCRajesh Pillai100% (1)
- Harmonics in Your Elec SystemDocument7 pagesHarmonics in Your Elec SystemAnubhav ShakyaPas encore d'évaluation
- 2 Fundementals of ProtectionDocument12 pages2 Fundementals of Protectionharsha_iitmPas encore d'évaluation
- SJ 9 PDFDocument52 pagesSJ 9 PDFNicolas X FloresPas encore d'évaluation
- Job Miller AbstractDocument5 pagesJob Miller AbstractTelika RamuPas encore d'évaluation
- Canvas Integration GuideDocument27 pagesCanvas Integration GuideValerie BossPas encore d'évaluation
- Standing Seam Installation-23-11-21Document35 pagesStanding Seam Installation-23-11-21Gokulnath TgPas encore d'évaluation
- L11 ImageplacementDocument2 pagesL11 ImageplacementJayram JavierPas encore d'évaluation
- Apache Derby DatabaseDocument4 pagesApache Derby DatabaseJohn KrcmarikPas encore d'évaluation
- Presented To:prof. Rashmi Menon & Class Prepared By: Valay Chaya (07) Nikul Maheshwari (28) Anis Vohra (56) Ravi Vyas (57) Nilesh JainDocument57 pagesPresented To:prof. Rashmi Menon & Class Prepared By: Valay Chaya (07) Nikul Maheshwari (28) Anis Vohra (56) Ravi Vyas (57) Nilesh JainAnis VohraPas encore d'évaluation
- ToraycaDocument1 pageToraycaAnonymous NFsIMHyfLtPas encore d'évaluation
- Silica Analyzer, Series 5000, Model 6000-Intrument Manual PDFDocument136 pagesSilica Analyzer, Series 5000, Model 6000-Intrument Manual PDFAdhy Priyo Pambudi100% (1)
- Rahul Soni BiodataDocument2 pagesRahul Soni BiodataRahul SoniPas encore d'évaluation
- Elcometer 130: Soluble Salt ProfilerDocument8 pagesElcometer 130: Soluble Salt ProfilerRomualdo CarlosPas encore d'évaluation
- Network Design IssuesDocument13 pagesNetwork Design IssuesMustur Raghunath ReddyPas encore d'évaluation
- 2.changing Challenges For The Operations - Engineering Managers-1Document34 pages2.changing Challenges For The Operations - Engineering Managers-1b00199916Pas encore d'évaluation
- Final Report - Submitted - ExactspaceDocument118 pagesFinal Report - Submitted - ExactspaceParasuram PadmanabhanPas encore d'évaluation
- Caledonian: BS 6346 PVC Insulated, Armored Power and Control CablesDocument28 pagesCaledonian: BS 6346 PVC Insulated, Armored Power and Control CablessurenediyaPas encore d'évaluation
- OODMSDocument8 pagesOODMSvanikkdi76Pas encore d'évaluation
- Aksesoris PumpDocument10 pagesAksesoris PumpDido AlexanPas encore d'évaluation
- A Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemsDocument10 pagesA Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemstarekeeePas encore d'évaluation
- GNP-GAP Installation InstructionsDocument10 pagesGNP-GAP Installation InstructionsLeonardo ValenciaPas encore d'évaluation
- SATR-J - 6802 - Rev 0 PDFDocument3 pagesSATR-J - 6802 - Rev 0 PDFAdel KlkPas encore d'évaluation
- VIJAYDocument61 pagesVIJAYYOGESH CHAUHANPas encore d'évaluation
- Ethics Approval Process 20150223Document8 pagesEthics Approval Process 20150223MPTScribidPas encore d'évaluation