Vous aimerez peut-être aussi
- TQIWPJS0ON 9 Aluminium ExtrusionDocument3 pagesTQIWPJS0ON 9 Aluminium Extrusionlamia97Pas encore d'évaluation
- Stud And: The MineraDocument172 pagesStud And: The Mineralamia97Pas encore d'évaluation
- Jump To Navigation Jump To SearchDocument16 pagesJump To Navigation Jump To Searchlamia97Pas encore d'évaluation
- Quality AssuaranceDocument150 pagesQuality Assuarancelamia97100% (1)
- Differences in Densification Behaviour oDocument8 pagesDifferences in Densification Behaviour olamia97Pas encore d'évaluation
- CSWIP Welding Inspection Notes and QuestionsDocument133 pagesCSWIP Welding Inspection Notes and Questionslram70100% (20)
- Procedure Qualification RecordDocument10 pagesProcedure Qualification Recordlamia97Pas encore d'évaluation
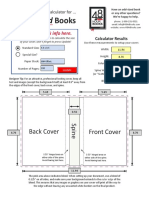
- Case Bound Books: Back Cover Front CoverDocument1 pageCase Bound Books: Back Cover Front Coverlamia97Pas encore d'évaluation
- RaiS2012 PDFDocument21 pagesRaiS2012 PDFlamia97Pas encore d'évaluation
- Coxem CX-200Plus - Operating ManualDocument4 pagesCoxem CX-200Plus - Operating Manuallamia97Pas encore d'évaluation
- Bohr MagnetonsDocument5 pagesBohr Magnetonslamia97Pas encore d'évaluation
- Jubail Industrial College: Dept. of Çáåäïóé Çáãíßçäíßíé Æçáêõäíú / Program Maaden Al/5 Rolling/ExtrusionDocument1 pageJubail Industrial College: Dept. of Çáåäïóé Çáãíßçäíßíé Æçáêõäíú / Program Maaden Al/5 Rolling/Extrusionlamia97Pas encore d'évaluation
- 0deec5241b45d2bb69000000 PDFDocument6 pages0deec5241b45d2bb69000000 PDFlamia97Pas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Claim of FactDocument11 pagesClaim of FactXeb UlritzPas encore d'évaluation
- Evidence Prove DiscriminationDocument5 pagesEvidence Prove DiscriminationRenzo JimenezPas encore d'évaluation
- Instant Download Business in Action 7Th Edition Bovee Solutions Manual PDF ScribdDocument17 pagesInstant Download Business in Action 7Th Edition Bovee Solutions Manual PDF ScribdLance CorreaPas encore d'évaluation
- ABARI-Volunteer Guide BookDocument10 pagesABARI-Volunteer Guide BookEla Mercado0% (1)
- Hare and Hyena: Mutugi KamundiDocument18 pagesHare and Hyena: Mutugi KamundiAndresilePas encore d'évaluation
- Diogenes Laertius-Book 10 - Epicurus - Tomado de Lives of The Eminent Philosophers (Oxford, 2018) PDFDocument54 pagesDiogenes Laertius-Book 10 - Epicurus - Tomado de Lives of The Eminent Philosophers (Oxford, 2018) PDFAndres Felipe Pineda JaimesPas encore d'évaluation
- ADocument54 pagesActyvtePas encore d'évaluation
- Highlights ASME Guides Preheat PWHT IDocument4 pagesHighlights ASME Guides Preheat PWHT IArul Edwin Vijay VincentPas encore d'évaluation
- APA Vs Harvard Referencing - PDFDocument4 pagesAPA Vs Harvard Referencing - PDFTalo Contajazz Chileshe50% (2)
- Combined South Dakota Motions To Reconsider in ICWA CaseDocument53 pagesCombined South Dakota Motions To Reconsider in ICWA CaseLee StranahanPas encore d'évaluation
- Pathophysiology of Myocardial Infarction and Acute Management StrategiesDocument11 pagesPathophysiology of Myocardial Infarction and Acute Management StrategiesnwabukingzPas encore d'évaluation
- Module 5 What Is Matter PDFDocument28 pagesModule 5 What Is Matter PDFFLORA MAY VILLANUEVAPas encore d'évaluation
- Simran's ResumeDocument1 pageSimran's ResumesimranPas encore d'évaluation
- Li JinglinDocument3 pagesLi JinglincorneliuskooPas encore d'évaluation
- 9400 Series - Catalogue - AccessoriesDocument86 pages9400 Series - Catalogue - AccessoriesSaulo Leonardo Fabelo FontesPas encore d'évaluation
- Nutridiet-Enteral and Parenteral FeedingDocument3 pagesNutridiet-Enteral and Parenteral FeedingBSN 1-N CASTRO, RicciPas encore d'évaluation
- Ultracold Atoms SlidesDocument49 pagesUltracold Atoms SlideslaubbaumPas encore d'évaluation
- Hele Grade4Document56 pagesHele Grade4Chard Gonzales100% (3)
- Session 1Document18 pagesSession 1Akash GuptaPas encore d'évaluation
- Contemporary Strategic ManagementDocument2 pagesContemporary Strategic ManagementZee Dee100% (1)
- Quality Control of Rigid Pavements 1Document58 pagesQuality Control of Rigid Pavements 1pranjpatil100% (1)
- Best Mutual Funds For 2023 & BeyondDocument17 pagesBest Mutual Funds For 2023 & BeyondPrateekPas encore d'évaluation
- AIIMS 2015 Solved PaperDocument436 pagesAIIMS 2015 Solved PaperSurya TejaPas encore d'évaluation
- 02 Object Modeling TechniqueDocument50 pages02 Object Modeling TechniqueMuhammad Romadhon Batukarang EsdPas encore d'évaluation
- Colfax MR Series CompresorDocument2 pagesColfax MR Series CompresorinvidiuoPas encore d'évaluation
- Importance of Skill Based Education-2994Document5 pagesImportance of Skill Based Education-2994João Neto0% (1)
- Origin ManualDocument186 pagesOrigin ManualmariaPas encore d'évaluation
- Geotechnical PaperDocument16 pagesGeotechnical PaperTxavo HesiarenPas encore d'évaluation
- Genil v. Rivera DigestDocument3 pagesGenil v. Rivera DigestCharmila SiplonPas encore d'évaluation
- Test 2-Module 1 12-10-2017: VocabularyDocument2 pagesTest 2-Module 1 12-10-2017: VocabularySzabolcs Kelemen100% (1)