Vous aimerez peut-être aussi
- Spring Wind UpDocument8 pagesSpring Wind UpAvinashRaiPas encore d'évaluation
- Saponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseDocument14 pagesSaponification: Process of Making Soap From Animal Fat or Vegetable Oil Using A BaseAvinashRaiPas encore d'évaluation
- 48 WordNet Tulu ShivakumarDocument7 pages48 WordNet Tulu ShivakumarAvinashRaiPas encore d'évaluation
- Yoga Is UsedDocument42 pagesYoga Is UsedAvinashRaiPas encore d'évaluation
- FatigueDocument10 pagesFatigueAvinashRaiPas encore d'évaluation
- Cocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)Document80 pagesCocoa World Production (2015/2016) : No. Country Production (1000 Ton/year)AvinashRaiPas encore d'évaluation
- CasshewDocument11 pagesCasshewAvinashRaiPas encore d'évaluation
- AJSE December2009 Lowres PDFDocument14 pagesAJSE December2009 Lowres PDFAvinashRaiPas encore d'évaluation
- BharatanatyamDocument4 pagesBharatanatyamAvinashRaiPas encore d'évaluation
- Lateral Dynamics of Multiaxle Vehicles: Johannes StoerkleDocument87 pagesLateral Dynamics of Multiaxle Vehicles: Johannes StoerkleAvinashRaiPas encore d'évaluation
- FG IronDocument23 pagesFG IronAvinashRaiPas encore d'évaluation
- Design and Analysis of Independent Suspension System Using FEADocument7 pagesDesign and Analysis of Independent Suspension System Using FEAAvinashRaiPas encore d'évaluation
- Customer ID Why Did You Purchase Hotstar Premium?Document4 pagesCustomer ID Why Did You Purchase Hotstar Premium?AvinashRaiPas encore d'évaluation
- Dynamic Systems and Control: Associate Professor, Department of Engineering DesignDocument1 pageDynamic Systems and Control: Associate Professor, Department of Engineering DesignAvinashRaiPas encore d'évaluation
- Experimental Evaluation Trailing Arm Susp Thesis PDFDocument141 pagesExperimental Evaluation Trailing Arm Susp Thesis PDFAvinashRaiPas encore d'évaluation
- Absolute PDFDocument1 pageAbsolute PDFAvinashRaiPas encore d'évaluation
- About Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorDocument17 pagesAbout Fifth Wheels: If You Want To Enhance The Efficiency of Your TractorAvinashRaiPas encore d'évaluation
- Machine Design Ball Screw Vol 1 e BookDocument22 pagesMachine Design Ball Screw Vol 1 e Bookविशाल पुडासैनीPas encore d'évaluation
- Belts Drives 5Document11 pagesBelts Drives 5AvinashRaiPas encore d'évaluation
- Yang Hyundai Final 2232012lDocument7 pagesYang Hyundai Final 2232012lAvinashRaiPas encore d'évaluation
- Epe20120400004 37611614Document7 pagesEpe20120400004 37611614AvinashRaiPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Iso 12135 2002 FR en PDFDocument11 pagesIso 12135 2002 FR en PDFPaquita Londdon100% (2)
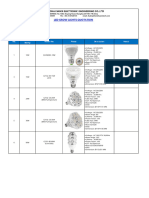
- LED Grow Lights List - Shanghai Sans - 3Document4 pagesLED Grow Lights List - Shanghai Sans - 3asadakhter239Pas encore d'évaluation
- Compaction and Pressureless Sintering of ZirconiaDocument9 pagesCompaction and Pressureless Sintering of ZirconiaWalaa Hassan Salem Abd El KareemPas encore d'évaluation
- Risk Assessment - ElectricalDocument6 pagesRisk Assessment - ElectricalFawaaz KhurwolahPas encore d'évaluation
- Blu Ray Disc and Copper Wires As Solar PanelDocument37 pagesBlu Ray Disc and Copper Wires As Solar PanelDavid Marc Josef Victorio67% (6)
- P 20Document103 pagesP 20DELSP - Dynamic Elevator Services Pakistan100% (6)
- M3 Full Syllabus in Simple ExplanationDocument2 pagesM3 Full Syllabus in Simple Explanationpraveen srikarPas encore d'évaluation
- True and False Energy Saving DevicesDocument5 pagesTrue and False Energy Saving DevicesJose APas encore d'évaluation
- KAS103T Maths I Model QP-2020-21Document2 pagesKAS103T Maths I Model QP-2020-21Tushar SaxenaPas encore d'évaluation
- Handbook of Silicon Based MEMS Materials and Technologies (3rd Edition)Document16 pagesHandbook of Silicon Based MEMS Materials and Technologies (3rd Edition)adriana romeroPas encore d'évaluation
- Lectrocount : Standard Bulk Truck System Standard Bulk Truck System Installation Procedures Installation ProceduresDocument44 pagesLectrocount : Standard Bulk Truck System Standard Bulk Truck System Installation Procedures Installation ProceduresPhilip HoferPas encore d'évaluation
- Tank Datasheet - CS-8000KL - RADocument1 pageTank Datasheet - CS-8000KL - RASumantrra ChattopadhyayPas encore d'évaluation
- Présentation PowerPoint PDFDocument68 pagesPrésentation PowerPoint PDFAssis RochaPas encore d'évaluation
- ENERGETIC ANALYSIS OF AN ABSORPTION CHILLER USING NH3-LiNO3 ASDocument14 pagesENERGETIC ANALYSIS OF AN ABSORPTION CHILLER USING NH3-LiNO3 ASAlvaro Antonio Ochoa VillaPas encore d'évaluation
- Certified Test Report: Craig Wire Products, LLC Date: 05/11/16 580 Carrollton Street Temple, GA 30179Document2 pagesCertified Test Report: Craig Wire Products, LLC Date: 05/11/16 580 Carrollton Street Temple, GA 30179Jorge Alfonzo C.Pas encore d'évaluation
- Chem Class 11 Notes For HydrogenDocument8 pagesChem Class 11 Notes For HydrogenAishahPas encore d'évaluation
- Chapter 9 - Motion Along A Straight LinesDocument5 pagesChapter 9 - Motion Along A Straight Linesahmadkamil9286% (7)
- 1 Tutorial TranformerDocument1 page1 Tutorial TranformerNitin NarangPas encore d'évaluation
- Water of Crystallization Lab ReportDocument2 pagesWater of Crystallization Lab ReportjanoyePas encore d'évaluation
- StructureDocument24 pagesStructureFrank StephensPas encore d'évaluation
- Specification For Pressure Vessel Plates, Alloy Steel, High-Strength, Quenched and TemperedDocument4 pagesSpecification For Pressure Vessel Plates, Alloy Steel, High-Strength, Quenched and TemperededwinbadajosPas encore d'évaluation
- JZBFJZBS Series Semi Hermetic Compressor Condensing Units (Bitzer Compressor)Document9 pagesJZBFJZBS Series Semi Hermetic Compressor Condensing Units (Bitzer Compressor)Coolequipment CeePas encore d'évaluation
- Iit Jam ChemistryDocument9 pagesIit Jam ChemistryUni ManchesterPas encore d'évaluation
- Lab 1 Part 2 Report DC Shunt Wound Part 2Document30 pagesLab 1 Part 2 Report DC Shunt Wound Part 2Mustaqim ShaidinPas encore d'évaluation
- Hd4 / Uniair (Withdrawable, Removable, Fixed Versions) Hd4 / R, Hd4 / S, Hd4 / Unimix (Fixed Version)Document10 pagesHd4 / Uniair (Withdrawable, Removable, Fixed Versions) Hd4 / R, Hd4 / S, Hd4 / Unimix (Fixed Version)Raffaele RattiPas encore d'évaluation
- 3 Shell and Tube Heat Exchanger Features That Affect Shell-Side Pressure DropDocument10 pages3 Shell and Tube Heat Exchanger Features That Affect Shell-Side Pressure DropRanjani J DeepakPas encore d'évaluation
- Chapter 7 - Designing For Machining and AssemblyDocument19 pagesChapter 7 - Designing For Machining and AssemblyGarry TaylorPas encore d'évaluation
- IFRSDocument21 pagesIFRSSamin KhadkaPas encore d'évaluation
- Buckling and Stability of ColumnsDocument49 pagesBuckling and Stability of ColumnsSalman ShabbirPas encore d'évaluation
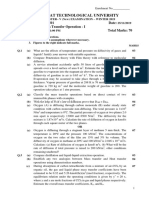
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityShivam PanchalPas encore d'évaluation