Vous aimerez peut-être aussi
- Power Grip Design Manual 17195Document179 pagesPower Grip Design Manual 17195Javier Jimenez100% (1)
- Torsion of ShaftsDocument3 pagesTorsion of ShaftskaoblekstenaPas encore d'évaluation
- Tutorial Problems: Problem 1Document8 pagesTutorial Problems: Problem 1Omar ZamalkawyPas encore d'évaluation
- Ex MatlabDocument7 pagesEx MatlabAbdulrhman AL-MasrePas encore d'évaluation
- Crossmorse Timing Belts PDFDocument52 pagesCrossmorse Timing Belts PDFDanilo RojasPas encore d'évaluation
- Dynamic Force Analysis of MechanismDocument21 pagesDynamic Force Analysis of MechanismAgare TubePas encore d'évaluation
- Gears PresentationDocument33 pagesGears PresentationNaveen YadavPas encore d'évaluation
- Chap 2 DesignDocument49 pagesChap 2 DesignFareedMohmed100% (1)
- IJME - Design and Analysis of - UmamaheswararaoDocument8 pagesIJME - Design and Analysis of - Umamaheswararaoiaset123Pas encore d'évaluation
- Lab 3Document7 pagesLab 3jisteelePas encore d'évaluation
- Pt41 COSIMIR ProfessionalDocument11 pagesPt41 COSIMIR ProfessionalAlberto MaciasPas encore d'évaluation
- Stepper Motor CatalogueDocument28 pagesStepper Motor CatalogueSuvek KumarPas encore d'évaluation
- Radial Stackups - Concentric Components ExampleDocument5 pagesRadial Stackups - Concentric Components ExampleGeorge HerreraPas encore d'évaluation
- Exercise:: Solution: Code: Part ADocument4 pagesExercise:: Solution: Code: Part AAbdul Rehman AfzalPas encore d'évaluation
- Lathe DesignDocument11 pagesLathe DesignShiyas Basheer0% (1)
- TSU BEARING TESTBED STATIC AND DYNAMIC LOAD ANALYSISDocument11 pagesTSU BEARING TESTBED STATIC AND DYNAMIC LOAD ANALYSISusama666Pas encore d'évaluation
- CIROS Production Handout - ENDocument121 pagesCIROS Production Handout - ENĐặng Xuân Hồng100% (1)
- Mechanical Design of Machine Elements-CouplingDocument10 pagesMechanical Design of Machine Elements-CouplingDepoel Like Soto DigelasPas encore d'évaluation
- Lab Report EetDocument4 pagesLab Report EetMuhd HaidharPas encore d'évaluation
- CVtech Baja CVTDocument6 pagesCVtech Baja CVTAbhinav Saxena100% (1)
- Noncircular GearsDocument6 pagesNoncircular GearsRăzvan NicolaePas encore d'évaluation
- Practice Exercises: Graphing Functions Using MATLABDocument2 pagesPractice Exercises: Graphing Functions Using MATLABDrake Ramoray100% (1)
- 2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1Document16 pages2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1minhnguyenvonhatPas encore d'évaluation
- Mechanical MeasurementsDocument8 pagesMechanical MeasurementsRam NicePas encore d'évaluation
- Limit and Fit Data BooDocument18 pagesLimit and Fit Data Booविशाल पुडासैनीPas encore d'évaluation
- 4 Cylinder Compressed Air Engine LayoutDocument15 pages4 Cylinder Compressed Air Engine LayoutJitendra BagalPas encore d'évaluation
- ContiTech Power Transmission SystemsDocument87 pagesContiTech Power Transmission SystemsRamírez Vilca JulioPas encore d'évaluation
- Machine Design ProjectDocument1 pageMachine Design Projectنور القرأنPas encore d'évaluation
- Manual 4Document3 pagesManual 4Maria MeharPas encore d'évaluation
- Flat Belt CalculationDocument19 pagesFlat Belt CalculationAstri NgentPas encore d'évaluation
- Abaqus TutorialDocument19 pagesAbaqus Tutorialklomps_jrPas encore d'évaluation
- Drivedesign LightpowerDocument110 pagesDrivedesign LightpowerMirescu Robert-AlexandruPas encore d'évaluation
- Simcenter SPEED: Rapid Electric Machine DesignDocument48 pagesSimcenter SPEED: Rapid Electric Machine DesignTuna TaşkıntunaPas encore d'évaluation
- EENG492 Extended Assignment Spring 2019-2020 - v4Document4 pagesEENG492 Extended Assignment Spring 2019-2020 - v4Jamil NahraPas encore d'évaluation
- Rotex InchDocument31 pagesRotex InchDwi Hermanto SetiawanPas encore d'évaluation
- DynamometerDocument7 pagesDynamometerGaurav S PatilPas encore d'évaluation
- Parametric Spur GearDocument11 pagesParametric Spur GearGoutam AcharjeePas encore d'évaluation
- Design Frictional Brake Absorption Dynamometer Strain GaugesDocument5 pagesDesign Frictional Brake Absorption Dynamometer Strain Gaugesविशाल पुडासैनीPas encore d'évaluation
- Servo Motor Modeling in SimulinkDocument10 pagesServo Motor Modeling in SimulinkRose GutierrezPas encore d'évaluation
- Problemas de EngranesDocument18 pagesProblemas de EngranesStratowarionPas encore d'évaluation
- Motor BrushlessDocument5 pagesMotor BrushlessHector CarrilloPas encore d'évaluation
- Design and Analysis of Floor Hydraulic JDocument28 pagesDesign and Analysis of Floor Hydraulic JabebawalemkerPas encore d'évaluation
- Motion Control Basics PDFDocument8 pagesMotion Control Basics PDFFouad ElhajjiPas encore d'évaluation
- Hitachi skd61 PDFDocument12 pagesHitachi skd61 PDFHieu Nguyen MinhPas encore d'évaluation
- Rack and Pinion2Document18 pagesRack and Pinion2Romy MPas encore d'évaluation
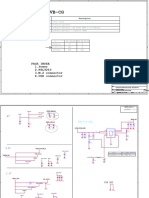
- RTL9210-VB-CG Demo V203 PDFDocument5 pagesRTL9210-VB-CG Demo V203 PDFCenusa MihaiPas encore d'évaluation
- CuñaDocument20 pagesCuñaJulian Granados RicoPas encore d'évaluation
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC MotorArif KusumaPas encore d'évaluation
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC Motoranonymous anonymousPas encore d'évaluation
- Handson Technology: 775 Ball Bearing DC MotorDocument13 pagesHandson Technology: 775 Ball Bearing DC Motorkaderdina abdullaPas encore d'évaluation
- 380 MotorDocument10 pages380 MotorNicolás JaimePas encore d'évaluation
- Handson Technology: Nema-17 1.5A High Torque 80N.cm Stepper MotorDocument12 pagesHandson Technology: Nema-17 1.5A High Torque 80N.cm Stepper MotorPUTRI NUR SHAHIDA MOHD ASRIPas encore d'évaluation
- 390 MotorDocument14 pages390 MotorAlex MoisePas encore d'évaluation
- Coreless Motor 720Document15 pagesCoreless Motor 720anikmandal106Pas encore d'évaluation
- CalculationDocument14 pagesCalculationLipika KanojiaPas encore d'évaluation
- How to Calculate Motor Torque Needs for CNC MachinesDocument5 pagesHow to Calculate Motor Torque Needs for CNC MachinesmuhdqasimPas encore d'évaluation
- Motor Calculations#numericalcalculation PDFDocument6 pagesMotor Calculations#numericalcalculation PDFCris VillarPas encore d'évaluation
- DC Motor Calculations - Calculating Torque - MICROMODocument8 pagesDC Motor Calculations - Calculating Torque - MICROMOaniruthPas encore d'évaluation
- IAI DD - Motor - CJ0199-1A-UST-1-1013Document8 pagesIAI DD - Motor - CJ0199-1A-UST-1-1013ElectromatePas encore d'évaluation
- Design Realization: John Canny 10/30/03Document35 pagesDesign Realization: John Canny 10/30/03muserahmatPas encore d'évaluation
- Proxima Patio Ceiling Fan Installation InstructionsDocument10 pagesProxima Patio Ceiling Fan Installation InstructionsLuka JelovčanPas encore d'évaluation
- Data Base BaruDocument102 pagesData Base BaruAfif PrstyoPas encore d'évaluation
- Manual HandgludsDocument11 pagesManual HandgludsBruno Peterson de PauliPas encore d'évaluation
- Geneva Mechanism and Its ApplicationsDocument4 pagesGeneva Mechanism and Its ApplicationsRutu PatilPas encore d'évaluation
- Kit Oficial STUDICA, Itens Que Compõem o KitDocument2 pagesKit Oficial STUDICA, Itens Que Compõem o KitGuga93Pas encore d'évaluation
- Electric Multi-Turn ActuatorsDocument36 pagesElectric Multi-Turn ActuatorsPop-Coman SimionPas encore d'évaluation
- 988f Final DriveDocument5 pages988f Final DriveАлександрPas encore d'évaluation
- Mercruiser 5.0l Mpi Alpha BravoDocument136 pagesMercruiser 5.0l Mpi Alpha Bravorodrigo catalanPas encore d'évaluation
- Centrifugal Pump - Troubleshooting MatrixDocument1 pageCentrifugal Pump - Troubleshooting MatrixSuresha Pd100% (1)
- Series E Centravac Centrifugal Chillers: Then. Now. AlwaysDocument2 pagesSeries E Centravac Centrifugal Chillers: Then. Now. AlwaysDianaPas encore d'évaluation
- Manual Murray OkDocument52 pagesManual Murray OkGIOVANNIPas encore d'évaluation
- Electrical Engineering Single Phage Motor Mostly Asked MCQ PDFDocument22 pagesElectrical Engineering Single Phage Motor Mostly Asked MCQ PDFNaveen Kumar100% (1)
- Service Manual EMDDocument887 pagesService Manual EMDAlok Garg92% (37)
- Gas Engines OSC9 G01 and OSC11 G03: en-GBDocument36 pagesGas Engines OSC9 G01 and OSC11 G03: en-GBRuanPas encore d'évaluation
- KalmarDocument2 pagesKalmarhse grogolPas encore d'évaluation
- SPPR10 10 Ton Body Kit: Owner'S ManualDocument5 pagesSPPR10 10 Ton Body Kit: Owner'S ManualBen KingPas encore d'évaluation
- Maytag Dryer Installation ManualDocument6 pagesMaytag Dryer Installation ManualRob HilliardPas encore d'évaluation
- Electric Motors Catalogue en 2019-2020 Low PDFDocument80 pagesElectric Motors Catalogue en 2019-2020 Low PDFAlex PumneaPas encore d'évaluation
- Inspection of Crank Pin Bearing Inspection On The Main EngineDocument2 pagesInspection of Crank Pin Bearing Inspection On The Main EngineEzhil AnPas encore d'évaluation
- 60 Egr SeriesDocument135 pages60 Egr SeriesGustavo de Paula100% (1)
- General Special ToolsDocument5 pagesGeneral Special ToolsBoran CarmonaPas encore d'évaluation
- Bombas Agua PDFDocument4 pagesBombas Agua PDFSERGUIPas encore d'évaluation
- MANITOU MHT-X 780 T E3 Maintenance and Repair Manual 212 Axle MO212S20Document245 pagesMANITOU MHT-X 780 T E3 Maintenance and Repair Manual 212 Axle MO212S20mliugong100% (4)
- hdt-400 HOTSTARTDocument24 pageshdt-400 HOTSTARTAlexisAlejandroSandovalFloresPas encore d'évaluation
- TRIPLEX NATIONAL OIL WELL BARCO-165T-5parts-list PDFDocument26 pagesTRIPLEX NATIONAL OIL WELL BARCO-165T-5parts-list PDFPlaneación y ConfiabilidadPas encore d'évaluation
- TD - Sa1 - 3ph - en - PDF (AUMA)Document4 pagesTD - Sa1 - 3ph - en - PDF (AUMA)andy175Pas encore d'évaluation
- (001, 104, 105, 137, 204, 205, 237, 300, 311, 350, 316, 700) Butterfly Valve DN 40 50 65 80 100 125 150 200 450 Pneum LTDocument26 pages(001, 104, 105, 137, 204, 205, 237, 300, 311, 350, 316, 700) Butterfly Valve DN 40 50 65 80 100 125 150 200 450 Pneum LTBata ZivanovicPas encore d'évaluation
- Steering System: PART NO. 1565182 1600 SRM 1109Document34 pagesSteering System: PART NO. 1565182 1600 SRM 1109Juanjo Garcia Jimenez100% (1)
- XT Style Hubs & BushingsDocument4 pagesXT Style Hubs & BushingsAlejandro HernandezPas encore d'évaluation
- Compass 2013 2.4LDocument292 pagesCompass 2013 2.4LCarlos MonzonPas encore d'évaluation