Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Anomaly Detection Principles and Algorithms: Mehrotra, K.G., Mohan, C.K., Huang, HDocument1 pageAnomaly Detection Principles and Algorithms: Mehrotra, K.G., Mohan, C.K., Huang, HIndi Wei-Huan HuPas encore d'évaluation
- ESPKey Tool Manual v1.0.0Document36 pagesESPKey Tool Manual v1.0.0Jad HaddadPas encore d'évaluation
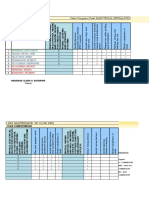
- Class Progress Chart Electrical Installation and Maintenance NC Ii (196 HRS)Document2 pagesClass Progress Chart Electrical Installation and Maintenance NC Ii (196 HRS)Shairrah Claire Bañares BatanguePas encore d'évaluation
- Prime Number FactorizationDocument10 pagesPrime Number FactorizationedithaenriquezPas encore d'évaluation
- Calibration of The Continuous Surface Cap Model For ConcreteDocument19 pagesCalibration of The Continuous Surface Cap Model For ConcreteAbhijit KulkarniPas encore d'évaluation
- LRL 1220 DDocument6 pagesLRL 1220 DDEShifPas encore d'évaluation
- EX - NO:1a Data Definition Languages (DDL) Commands of Base Tables and ViewsDocument44 pagesEX - NO:1a Data Definition Languages (DDL) Commands of Base Tables and Viewslalit thakur100% (1)
- 2-Way Doherty Amplifier With BLF888ADocument27 pages2-Way Doherty Amplifier With BLF888AerdemsecenPas encore d'évaluation
- Scopus Crystal NeedleDocument256 pagesScopus Crystal NeedleDr. Ramchandra Gosavi PatilPas encore d'évaluation
- STP10NK80Z - STP10NK80ZFP STW10NK80ZDocument11 pagesSTP10NK80Z - STP10NK80ZFP STW10NK80ZAnkitPas encore d'évaluation
- Magnetron PDFDocument1 pageMagnetron PDFmytrya debPas encore d'évaluation
- Hydraulic Structure - 16 - 30 - FianalDocument26 pagesHydraulic Structure - 16 - 30 - FianalMahmood YounsPas encore d'évaluation
- Physics 104.1 ManualDocument36 pagesPhysics 104.1 ManualFarmak AcebedoPas encore d'évaluation
- (DT-0581) 21010-BAE-70000-IN-RL-0002 - Revb2Document8 pages(DT-0581) 21010-BAE-70000-IN-RL-0002 - Revb2karthikesan6Pas encore d'évaluation
- Atmel 0038Document1 pageAtmel 0038namerPas encore d'évaluation
- Corirubber: Cori Engineers Private LimitedDocument1 pageCorirubber: Cori Engineers Private LimitedVivace SystmPas encore d'évaluation
- SharePoint 2010 QuestionsDocument5 pagesSharePoint 2010 QuestionsSreedhar KonduruPas encore d'évaluation
- Ch-3 Intersections, Interchanges & Terminals HODocument30 pagesCh-3 Intersections, Interchanges & Terminals HOBebi WakaPas encore d'évaluation
- College Level Math Practice TestDocument17 pagesCollege Level Math Practice TestHarsha Kasaragod100% (1)
- Electricity Markets PDFDocument2 pagesElectricity Markets PDFAhmed KhairiPas encore d'évaluation
- 125 Tractor: (Specifications and Design Subject To Change Without Notice)Document5 pages125 Tractor: (Specifications and Design Subject To Change Without Notice)Gary LarsonPas encore d'évaluation
- PIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) FinalDocument82 pagesPIA B2 - Module 2 (PHYSICS) SubModule 2.2 (Mechanics) Finalsamarrana1234679Pas encore d'évaluation
- ME361 - Manufacturing Science Technology: Measurements and MetrologyDocument20 pagesME361 - Manufacturing Science Technology: Measurements and MetrologyKartikeyaPas encore d'évaluation
- Powerflex 525 Devicenet Adapter: User ManualDocument140 pagesPowerflex 525 Devicenet Adapter: User ManualJahir Emerson Tantalean QuiñonesPas encore d'évaluation
- Harnack and Mean Value Inequalities On Graphs: 1 Introduction and Main ResultsDocument8 pagesHarnack and Mean Value Inequalities On Graphs: 1 Introduction and Main ResultsNo FacePas encore d'évaluation
- Introduction To GIS (Geographical Information System)Document20 pagesIntroduction To GIS (Geographical Information System)pwnjha100% (3)
- S32K14X RM Rev 4Document1 929 pagesS32K14X RM Rev 4Nguyễn Duy HùngPas encore d'évaluation
- A Quick Tutorial On RSLogix Emulator 5000Document9 pagesA Quick Tutorial On RSLogix Emulator 5000slavezerorjPas encore d'évaluation
- Wa Wa40-3 Komatsu s3d84Document2 pagesWa Wa40-3 Komatsu s3d84james foxPas encore d'évaluation