Vous aimerez peut-être aussi
- International Journal of Geographical Information Science: To Cite This Article: Andrej Osterman, Lucas BenediDocument26 pagesInternational Journal of Geographical Information Science: To Cite This Article: Andrej Osterman, Lucas BenediAndrej OstermanPas encore d'évaluation
- Fresnel Diffraction of Spin Waves: October 2018Document8 pagesFresnel Diffraction of Spin Waves: October 2018Andrej OstermanPas encore d'évaluation
- Implementation of The R.cuda - Los Module in The Open Source GRASS GIS by Using Parallel Computation On The NVIDIA CUDA Graphic CardsDocument6 pagesImplementation of The R.cuda - Los Module in The Open Source GRASS GIS by Using Parallel Computation On The NVIDIA CUDA Graphic CardsAndrej OstermanPas encore d'évaluation
- ECC PT1 (12) 064 - Orange - 3.5 GHZ Propagation ModelsDocument14 pagesECC PT1 (12) 064 - Orange - 3.5 GHZ Propagation ModelsAndrej OstermanPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Undertale - Undertale For Concert Band-PartsDocument63 pagesUndertale - Undertale For Concert Band-Partsjavier iruelaPas encore d'évaluation
- Report On Marketing Strategy of Wateen TelecomDocument28 pagesReport On Marketing Strategy of Wateen TelecomnaranaolabaPas encore d'évaluation
- 09 Fall17Auds Baritone EuphoniumDocument6 pages09 Fall17Auds Baritone Euphoniumbob wrightPas encore d'évaluation
- LG 32lg3000 Chassis Ld84a LCD TV SMDocument26 pagesLG 32lg3000 Chassis Ld84a LCD TV SMEmma FrostPas encore d'évaluation
- The Country Blues (Notes)Document8 pagesThe Country Blues (Notes)Rory Corbett100% (1)
- Su20110916210112x7 393986881 980653141Document18 pagesSu20110916210112x7 393986881 980653141khalishaPas encore d'évaluation
- Unt Lax Mandis Project - Seth Specter PDFDocument110 pagesUnt Lax Mandis Project - Seth Specter PDFpsychpostersPas encore d'évaluation
- Carnatic Music Theory1Document16 pagesCarnatic Music Theory1S RajendraPas encore d'évaluation
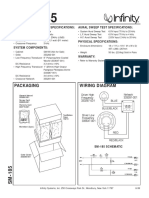
- Infinity sm-185Document2 pagesInfinity sm-185Bmwmotorsport GabriPas encore d'évaluation
- Present Simple - Present ProgressiveDocument32 pagesPresent Simple - Present ProgressiveJéssica Katherine Santoyo VillegasPas encore d'évaluation
- Kongsberg Powerware 700VA-3000VA UPS Type 9120, User's and Installation ManualDocument23 pagesKongsberg Powerware 700VA-3000VA UPS Type 9120, User's and Installation ManualZhiyong Shan100% (2)
- Cantares Del AlmaDocument2 pagesCantares Del AlmaJulio César Mosquera100% (2)
- DVB-TH Transmitter MeasurementsDocument30 pagesDVB-TH Transmitter MeasurementsStarLink1Pas encore d'évaluation
- Bela Lugosi and Boris Karloff - The Expanded Story of A Haunting Collaboration, With A Complete Filmography of Their Films TogetherDocument702 pagesBela Lugosi and Boris Karloff - The Expanded Story of A Haunting Collaboration, With A Complete Filmography of Their Films TogetherDryRot100% (1)
- 522 Week2 TutorialDocument2 pages522 Week2 TutorialEdwin SalvadorPas encore d'évaluation
- Manual-DMNG-PRO180 UG v2-5 EN PDFDocument86 pagesManual-DMNG-PRO180 UG v2-5 EN PDFlexaus950% (2)
- Intro To Event Management - Final PresoDocument28 pagesIntro To Event Management - Final PresoyogeshwarnPas encore d'évaluation
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanPas encore d'évaluation
- Ds 4100 KH SacombankDocument185 pagesDs 4100 KH SacombankQuang VõPas encore d'évaluation
- Brikerbox AR3000Document2 pagesBrikerbox AR3000Bayu Kukuh NugrohoPas encore d'évaluation
- Nano IP Series - Ipn920.Document2 pagesNano IP Series - Ipn920.PaMe LiTaPas encore d'évaluation
- AMPHENOL - 5980400P - 12 PortsDocument7 pagesAMPHENOL - 5980400P - 12 Portsbudi wirahmiPas encore d'évaluation
- Kander and Ebb Research PaperDocument8 pagesKander and Ebb Research PaperEmily ParrishPas encore d'évaluation
- FCE 1 - e PrintatDocument3 pagesFCE 1 - e PrintatSimona Diana MicuPas encore d'évaluation
- One Direction Little Things WorksheetDocument2 pagesOne Direction Little Things WorksheetAmanda Del GrandePas encore d'évaluation
- The X-Files Small Potatoes Commentary TrackDocument11 pagesThe X-Files Small Potatoes Commentary TrackhaskkPas encore d'évaluation
- Absract For Reverse Parking Sensor CircuitDocument4 pagesAbsract For Reverse Parking Sensor CircuitKïshörë100% (1)
- A Hollywood Exit: What California Must Do To Remain Competitive in Entertainment - and Keep JobsDocument42 pagesA Hollywood Exit: What California Must Do To Remain Competitive in Entertainment - and Keep JobsSouthern California Public RadioPas encore d'évaluation
- A DANCE WITH DRAGONS by George R. R. Martin, ExcerptDocument36 pagesA DANCE WITH DRAGONS by George R. R. Martin, ExcerptRandom House Publishing Group55% (11)
- Group 1: Quiz - Direct and Indirect QuestionsDocument2 pagesGroup 1: Quiz - Direct and Indirect QuestionssokkimPas encore d'évaluation