Vous aimerez peut-être aussi
- Control SystemsDocument3 pagesControl SystemsselvajothiPas encore d'évaluation
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyPas encore d'évaluation
- 9A19401 Contol SystemsDocument7 pages9A19401 Contol SystemssivabharathamurthyPas encore d'évaluation
- EC6405-Control Systems EngineeringDocument12 pagesEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaPas encore d'évaluation
- EC2257 Control Systems Question Paper Code 11287Document5 pagesEC2257 Control Systems Question Paper Code 11287Nishanth NiraiPas encore d'évaluation
- BE/BTech 4th Sem Control System Engineering 1st Internal AssessmentDocument4 pagesBE/BTech 4th Sem Control System Engineering 1st Internal AssessmentreporterrajiniPas encore d'évaluation
- II B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Document8 pagesII B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Sandeep YandamuriPas encore d'évaluation
- Control SystemsDocument8 pagesControl SystemsammukeeruPas encore d'évaluation
- Control systems document analysisDocument4 pagesControl systems document analysissivaeinfoPas encore d'évaluation
- EC 2255 Control SystemsDocument5 pagesEC 2255 Control SystemsselvijeganPas encore d'évaluation
- LDCS QuestionsDocument10 pagesLDCS QuestionsRiya SinghPas encore d'évaluation
- SimbuDocument3 pagesSimbu84- R. SilamabarasanPas encore d'évaluation
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanPas encore d'évaluation
- TUTORIAL 6 - System ResponseDocument15 pagesTUTORIAL 6 - System ResponsetiraPas encore d'évaluation
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaPas encore d'évaluation
- Control System Descriptive Type QuestionsDocument2 pagesControl System Descriptive Type QuestionsAlka Goyal100% (1)
- VMU Aarupadai Veedu Institute of Technology Question Bank for Control SystemsDocument10 pagesVMU Aarupadai Veedu Institute of Technology Question Bank for Control SystemsSagaraptor RexPas encore d'évaluation
- GTU BE SEM-IV Control Theory Exam Nov 2011Document3 pagesGTU BE SEM-IV Control Theory Exam Nov 2011vpj100Pas encore d'évaluation
- QB BcsDocument10 pagesQB BcsKrishna Reddy Y.VPas encore d'évaluation
- CS QuestionsDocument2 pagesCS QuestionsKarthik MambersPas encore d'évaluation
- EE43 Control Systems B.E. Degree Exam QuestionsDocument1 pageEE43 Control Systems B.E. Degree Exam QuestionsrameshsenaPas encore d'évaluation
- Control system transfer functions and root locus analysisDocument2 pagesControl system transfer functions and root locus analysisSupreet P APas encore d'évaluation
- acs_2018s2_assn1Document4 pagesacs_2018s2_assn1MiraelPas encore d'évaluation
- EC8391 - Control Systems EngineeringDocument3 pagesEC8391 - Control Systems Engineeringsyed1188Pas encore d'évaluation
- Control System Question BankDocument12 pagesControl System Question Banksagar R RaoPas encore d'évaluation
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88Pas encore d'évaluation
- 2 Year System Dynamics Sheet 6Document4 pages2 Year System Dynamics Sheet 6Yasser BahaaPas encore d'évaluation
- Control Systems Engineering 2010 Sept (2006 Ad)Document2 pagesControl Systems Engineering 2010 Sept (2006 Ad)Tomin PalliyampilPas encore d'évaluation
- Control Systems Exam QuestionsDocument3 pagesControl Systems Exam QuestionsVinayPas encore d'évaluation
- B. E./B.Tech. Degree Examination, Apriiimay 2005Document4 pagesB. E./B.Tech. Degree Examination, Apriiimay 2005vsalaiselvamPas encore d'évaluation
- Cs ImpDocument5 pagesCs ImpLiki LikithPas encore d'évaluation
- IV Semester EED Time Response Analysis Transfer FunctionsDocument4 pagesIV Semester EED Time Response Analysis Transfer FunctionsNitin GoyalPas encore d'évaluation
- Cs April 2011Document8 pagesCs April 201129viswa12Pas encore d'évaluation
- HW 5Document2 pagesHW 5Mahir MahmoodPas encore d'évaluation
- Code - No: 45106Document2 pagesCode - No: 45106Raj SamuelPas encore d'évaluation
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920Pas encore d'évaluation
- Assignment-2 Control SystemDocument4 pagesAssignment-2 Control SystemRajesh BathijaPas encore d'évaluation
- EE404LinearSystemsAnalysis April2010 2006schemeDocument2 pagesEE404LinearSystemsAnalysis April2010 2006schemeAnith KrishnanPas encore d'évaluation
- Ec2255 Control SystemsDocument4 pagesEc2255 Control SystemsSree GaneshPas encore d'évaluation
- Control System Engineering Time Response and Frequency AnalysisDocument16 pagesControl System Engineering Time Response and Frequency AnalysisrameshsmePas encore d'évaluation
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoPas encore d'évaluation
- Ee2253 - Control Systems April-May 2010Document3 pagesEe2253 - Control Systems April-May 2010durgabalPas encore d'évaluation
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTAPas encore d'évaluation
- 3cs EceDocument3 pages3cs Ecekirankumar412Pas encore d'évaluation
- Control SystemsDocument8 pagesControl Systemsvasantha_btechPas encore d'évaluation
- Control Systems Question BankDocument12 pagesControl Systems Question BankdhayasathishPas encore d'évaluation
- Control - Systems (2013) Previous Paper PDFDocument1 pageControl - Systems (2013) Previous Paper PDFnarendran069Pas encore d'évaluation
- Control System Modelling and Time Response Analysis NotesDocument12 pagesControl System Modelling and Time Response Analysis NotesSaravanan PazapughalPas encore d'évaluation
- Computer Science Textbook Solutions - 29Document31 pagesComputer Science Textbook Solutions - 29acc-expertPas encore d'évaluation
- Cse Question Bank Part BDocument5 pagesCse Question Bank Part Bbalaji1986Pas encore d'évaluation
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatPas encore d'évaluation
- Problem 2Document4 pagesProblem 2Jade Do0% (1)
- Control Systems Lesson Plans and AssignmentsDocument25 pagesControl Systems Lesson Plans and AssignmentsjeetendrasidhiPas encore d'évaluation
- Assignments QuestionsDocument11 pagesAssignments QuestionsSetu Patel50% (2)
- Control SystemsDocument8 pagesControl SystemspadmajasivaPas encore d'évaluation
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarPas encore d'évaluation
- acs_2012s2_assn1Document6 pagesacs_2012s2_assn1MiraelPas encore d'évaluation
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsD'EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsPas encore d'évaluation
- LabDocument16 pagesLabguru.rjpmPas encore d'évaluation
- TET Paper 1 EnglishDocument34 pagesTET Paper 1 Englishguru.rjpmPas encore d'évaluation
- TET Paper 2 Language 2 EnglishDocument26 pagesTET Paper 2 Language 2 Englishguru.rjpmPas encore d'évaluation
- Machine LagDocument9 pagesMachine Lagguru.rjpmPas encore d'évaluation
- List of CertificatesDocument2 pagesList of Certificatesguru.rjpmPas encore d'évaluation
- TET Paper 1 Environmental Studues ScienceDocument18 pagesTET Paper 1 Environmental Studues Scienceguru.rjpmPas encore d'évaluation
- Ans 2Document4 pagesAns 2guru.rjpmPas encore d'évaluation
- NTSE MAT Solved Sample Paper 3Document16 pagesNTSE MAT Solved Sample Paper 3guru.rjpm100% (1)
- APCase 2014 - Extended Abstract Template LNCS FormatDocument4 pagesAPCase 2014 - Extended Abstract Template LNCS Formatguru.rjpmPas encore d'évaluation
- Tamil Baby Girl NamesDocument10 pagesTamil Baby Girl Namesguru.rjpmPas encore d'évaluation
- History - KadaiDocument2 pagesHistory - Kadaiguru.rjpmPas encore d'évaluation
- SSLC June2011 MathsDocument16 pagesSSLC June2011 Mathsguru.rjpmPas encore d'évaluation
- Action Script 1 Flash 8Document5 pagesAction Script 1 Flash 8guru.rjpm100% (1)
- Pure Tamil Baby Names For Girls - PureDocument6 pagesPure Tamil Baby Names For Girls - Pureguru.rjpmPas encore d'évaluation
- Create Pong game with Flash ActionScriptDocument7 pagesCreate Pong game with Flash ActionScriptrsunjayaPas encore d'évaluation
- TNEA 2013 Information BrochureDocument38 pagesTNEA 2013 Information BrochureRajarajanPas encore d'évaluation
- Maths: (A) One-OneDocument10 pagesMaths: (A) One-OneJoshuva DanielPas encore d'évaluation
- Chapter 37 Java Database ProgrammingDocument60 pagesChapter 37 Java Database Programmingguru.rjpmPas encore d'évaluation
- Control System ManualDocument23 pagesControl System ManualArivumaniPas encore d'évaluation
- CSDocument0 pageCSguru.rjpmPas encore d'évaluation
- Control SystemsDocument0 pageControl Systemsguru.rjpmPas encore d'évaluation
- Ultrasonic Doppler Shift MethodDocument4 pagesUltrasonic Doppler Shift Methodguru.rjpm67% (3)
- Action Script 1 Flash 8Document5 pagesAction Script 1 Flash 8guru.rjpm100% (1)
- Manonmaniam Sundaranar University Syllabus in BCADocument10 pagesManonmaniam Sundaranar University Syllabus in BCAguru.rjpm0% (1)
- Action Script 1 Flash 8Document5 pagesAction Script 1 Flash 8guru.rjpm100% (1)
- TNPSC Group 4 General Tamil Answer KeyDocument8 pagesTNPSC Group 4 General Tamil Answer Keykapeed_supPas encore d'évaluation
- Eee IVDocument22 pagesEee IVguru.rjpmPas encore d'évaluation
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Control Systems Year: Ii Time: 1.30 Hrs Marks: 50Document4 pagesControl Systems Year: Ii Time: 1.30 Hrs Marks: 50guru.rjpmPas encore d'évaluation
- Differential Auscultatory TechniqueDocument3 pagesDifferential Auscultatory Techniqueguru.rjpm0% (1)
- Spain Guia de Bolsillo Productos de Infraestuctura de RedDocument45 pagesSpain Guia de Bolsillo Productos de Infraestuctura de Redscribd01Pas encore d'évaluation
- Line Follower Robot Project ReportDocument9 pagesLine Follower Robot Project ReportIqra ArainPas encore d'évaluation
- Seventy Years of Getting Transistorized 2017Document5 pagesSeventy Years of Getting Transistorized 2017RajatPas encore d'évaluation
- Application of Instrument Transformers - CTDocument24 pagesApplication of Instrument Transformers - CTKaran TripathiPas encore d'évaluation
- Radar Assignment 1 SolDocument8 pagesRadar Assignment 1 Solfuckoff121gPas encore d'évaluation
- PC 3Document1 pagePC 3Daniel VargasPas encore d'évaluation
- Unit 3 Interfacing: InterfaceDocument21 pagesUnit 3 Interfacing: Interfacechirag khandelwalPas encore d'évaluation
- Ref 550Document14 pagesRef 550Dario AbelPas encore d'évaluation
- CPT Cirprotec PSC4 12 - 5 400 TT IR 77738406Document8 pagesCPT Cirprotec PSC4 12 - 5 400 TT IR 77738406niltonnas80Pas encore d'évaluation
- Ofc Lab Manual 2Document21 pagesOfc Lab Manual 2Shobhit JainPas encore d'évaluation
- Wallchart Cisco Ccap 2013Document2 pagesWallchart Cisco Ccap 2013Ti NguyenPas encore d'évaluation
- Amateur Radio Operator Certificate Exam QuestionsDocument109 pagesAmateur Radio Operator Certificate Exam QuestionstaufiqPas encore d'évaluation
- Data Sheets: ©2004 Littelfuse, Inc. Thyristor Product Catalog +1 972-580-7777Document76 pagesData Sheets: ©2004 Littelfuse, Inc. Thyristor Product Catalog +1 972-580-7777fadia.fayadhPas encore d'évaluation
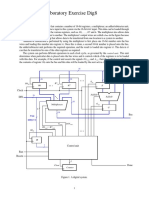
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocument6 pagesLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaPas encore d'évaluation
- Phasor DiagramsDocument3 pagesPhasor Diagramspurushg62Pas encore d'évaluation
- Lab 2 BEEL 1125Document7 pagesLab 2 BEEL 1125Denayshan SelvarajooPas encore d'évaluation
- 9157 - p5 - Electrical System'sDocument97 pages9157 - p5 - Electrical System'snaranbaatar_bPas encore d'évaluation
- Ch08-Image CompressionDocument38 pagesCh08-Image Compressionbaigsalman251Pas encore d'évaluation
- TCS-P-107.01 (Rev 01)Document8 pagesTCS-P-107.01 (Rev 01)Ahmed FathyPas encore d'évaluation
- An Efficient Procedure For Narrowband Bandpass Filter DesignDocument7 pagesAn Efficient Procedure For Narrowband Bandpass Filter DesignPhilippeaPas encore d'évaluation
- BrightSign Built-In ManualDocument18 pagesBrightSign Built-In ManualecdkPas encore d'évaluation
- Brosur Arr Be RR-100-TB02Document2 pagesBrosur Arr Be RR-100-TB02sharonfifa22Pas encore d'évaluation
- Alarm Annunciators With Plastic EnclosureDocument14 pagesAlarm Annunciators With Plastic EnclosureswarupkumarnayakPas encore d'évaluation
- Flir T530-24-DatasheetDocument2 pagesFlir T530-24-DatasheetJuan PérezPas encore d'évaluation
- Notes Lecture7 GSMDocument32 pagesNotes Lecture7 GSMAkhil DasPas encore d'évaluation
- HPE 3PAR StoreServ 8000 Site Planning PDFDocument68 pagesHPE 3PAR StoreServ 8000 Site Planning PDFBas VolkswagenPas encore d'évaluation
- Leaflet Dahua Smart Digital Signage 201906 (2P)Document2 pagesLeaflet Dahua Smart Digital Signage 201906 (2P)lucky zorroPas encore d'évaluation
- SEng 3102 Multimedia Assignment Group ReportDocument18 pagesSEng 3102 Multimedia Assignment Group ReportElisaPas encore d'évaluation
- Honeywell S7830 SpecDocument16 pagesHoneywell S7830 SpecAndres ParedesPas encore d'évaluation
- Cadence Innovus: Innovation Continues : Peter Pan, Product Manager, Cadence Arm Tech Symposia - Beijing October 2018Document26 pagesCadence Innovus: Innovation Continues : Peter Pan, Product Manager, Cadence Arm Tech Symposia - Beijing October 2018Dileep GangavaramPas encore d'évaluation