Vous aimerez peut-être aussi
- Bioelectrical Signal Processing in Cardiac and Neurological ApplicationsD'EverandBioelectrical Signal Processing in Cardiac and Neurological ApplicationsPas encore d'évaluation
- T FM Bassam Mohamed Prote GDocument100 pagesT FM Bassam Mohamed Prote GDerrickPas encore d'évaluation
- Nonlinear Traction Control Design for Parallel Hybrid VehiclesD'EverandNonlinear Traction Control Design for Parallel Hybrid VehiclesPas encore d'évaluation
- Drone ImplementationDocument181 pagesDrone ImplementationFelipe CarvalhoPas encore d'évaluation
- Embedded Systems and Software ValidationD'EverandEmbedded Systems and Software ValidationÉvaluation : 4 sur 5 étoiles4/5 (1)
- Analogdigitalis Atalakitok Tesztelese A1Document49 pagesAnalogdigitalis Atalakitok Tesztelese A1Madhusmita PandaPas encore d'évaluation
- Communication and Control in Electric Power Systems: Applications of Parallel and Distributed ProcessingD'EverandCommunication and Control in Electric Power Systems: Applications of Parallel and Distributed ProcessingPas encore d'évaluation
- Experiment: Noise-Equivalent Power of Up-Conversion: Ben-Gurion University of The NegevDocument28 pagesExperiment: Noise-Equivalent Power of Up-Conversion: Ben-Gurion University of The NegevMoti Ben LaishPas encore d'évaluation
- RNN ReferDocument71 pagesRNN ReferOqaabPas encore d'évaluation
- Practical Machinery Vibration Analysis and Predictive MaintenanceD'EverandPractical Machinery Vibration Analysis and Predictive MaintenanceÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Manifold Based System For Passive Active Spectrum SharingDocument91 pagesManifold Based System For Passive Active Spectrum SharingNicolas PironnetPas encore d'évaluation
- Video and Multimedia Transmissions over Cellular Networks: Analysis, Modelling and Optimization in Live 3G Mobile CommunicationsD'EverandVideo and Multimedia Transmissions over Cellular Networks: Analysis, Modelling and Optimization in Live 3G Mobile CommunicationsPas encore d'évaluation
- Doppler SensorDocument149 pagesDoppler Sensoryossarian8674Pas encore d'évaluation
- Youssef DellyDocument86 pagesYoussef DellyYou BgPas encore d'évaluation
- Mini Project FinalDocument49 pagesMini Project FinalMayur MorePas encore d'évaluation
- Battery ResearchDocument38 pagesBattery ResearchVijay Vikram SinghPas encore d'évaluation
- Environment For Industrial Robot Performance Evaluation: Hongyi LiuDocument59 pagesEnvironment For Industrial Robot Performance Evaluation: Hongyi LiuBiris GabrielPas encore d'évaluation
- A Comprehensive Study of Passive Wake-Up Radio in Wireless Sensor NetworksDocument73 pagesA Comprehensive Study of Passive Wake-Up Radio in Wireless Sensor NetworksGodyPas encore d'évaluation
- Interference Rejection Combining System PerformanceDocument73 pagesInterference Rejection Combining System PerformanceumeraftabranaPas encore d'évaluation
- Building A Mobile Robot With Optical Tracking and Basic SLAMDocument38 pagesBuilding A Mobile Robot With Optical Tracking and Basic SLAMSwam HtetPas encore d'évaluation
- FULLTEXT01Document63 pagesFULLTEXT01Soumik SinhaPas encore d'évaluation
- 16-17-SERINI DavideDocument133 pages16-17-SERINI DavidesandroPas encore d'évaluation
- MEMS Inertial Sensors Technology: Studies On MechatronicsDocument33 pagesMEMS Inertial Sensors Technology: Studies On MechatronicsMatei LaurentiuPas encore d'évaluation
- Design and Modeling of InductorsNPAryanDocument88 pagesDesign and Modeling of InductorsNPAryanJoe MullerPas encore d'évaluation
- Photon MappingDocument149 pagesPhoton MappingmaxhatbluPas encore d'évaluation
- Power System Protection Modelling With IEC 61850 and IEC 61499Document81 pagesPower System Protection Modelling With IEC 61850 and IEC 61499teja61850Pas encore d'évaluation
- BTP Report FinalDocument47 pagesBTP Report FinalnikhilPas encore d'évaluation
- Riley RE 2009 ThesisDocument82 pagesRiley RE 2009 ThesisRichard E Riley100% (2)
- Dissertation PDFDocument105 pagesDissertation PDFbogdanPas encore d'évaluation
- Advanced LiDAR SystemsDocument104 pagesAdvanced LiDAR SystemsAlan PereiraPas encore d'évaluation
- Model-Based Design of A Satellite With OrthogonalDocument59 pagesModel-Based Design of A Satellite With Orthogonalsoros4Pas encore d'évaluation
- Comparisons Between Different Hybrid Statistical Models For Accurate Forecasting of Photovoltaic Systems PowerDocument125 pagesComparisons Between Different Hybrid Statistical Models For Accurate Forecasting of Photovoltaic Systems PowerandcretiPas encore d'évaluation
- 5a 059 PDFDocument170 pages5a 059 PDFlotfiPas encore d'évaluation
- Grid MapDocument74 pagesGrid MapAlexandr PototurkoPas encore d'évaluation
- Three-Level ANPCDocument85 pagesThree-Level ANPCAlexandru100% (1)
- Schlief BA TNWDocument44 pagesSchlief BA TNWYhomn AcerPas encore d'évaluation
- Robot Project DocumentationDocument102 pagesRobot Project DocumentationLenny LemorPas encore d'évaluation
- Lab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT KanpurDocument91 pagesLab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT KanpurSatyajit SahooPas encore d'évaluation
- Flores LicDocument126 pagesFlores Lictaner56Pas encore d'évaluation
- Danieletd 08 25 - 2Document171 pagesDanieletd 08 25 - 2omar ahmedPas encore d'évaluation
- Optical Wireless CommunicationDocument36 pagesOptical Wireless CommunicationMuhammad ShehryarPas encore d'évaluation
- Vehicular Positioning Using 5G and Sensor FusionDocument82 pagesVehicular Positioning Using 5G and Sensor FusionEren Cem GöksülükPas encore d'évaluation
- Structural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Document156 pagesStructural Identification of Bridges: Development of An Integrated System For Continuous Dynamic Monitoring.Alberto LorenzonPas encore d'évaluation
- Teng SA 2014 PDFDocument37 pagesTeng SA 2014 PDFFerry OpilOpPas encore d'évaluation
- 2006 Santhosh - ReportDocument33 pages2006 Santhosh - ReportMohamed Hechmi JERIDIPas encore d'évaluation
- Butt DottoratoDocument151 pagesButt DottoratoVi YifPas encore d'évaluation
- Thesis MainDocument81 pagesThesis MainÚt NhỏPas encore d'évaluation
- EMI Measurements and Modeling: of A DC-DC Buck ConverterDocument96 pagesEMI Measurements and Modeling: of A DC-DC Buck ConverterJonathan GherardPas encore d'évaluation
- TP1 ACT RPT CMS ARI 13 9202 ClimateTippingPointsDocument49 pagesTP1 ACT RPT CMS ARI 13 9202 ClimateTippingPointsEmmanuel kpegloPas encore d'évaluation
- Mit PDFDocument174 pagesMit PDFCHAVEZ MURGA ARTURO ALEJANDROPas encore d'évaluation
- Final Mini Project ReportDocument45 pagesFinal Mini Project Reportmaxplanck6.626e34Pas encore d'évaluation
- Implementation Issues of Multiuser Detection in CDMA Communication SystemsDocument69 pagesImplementation Issues of Multiuser Detection in CDMA Communication SystemsAnil JagadeshaPas encore d'évaluation
- Thesis (2018) Verpaele, M. Assessment of The Performance of Mobile Fans in A Tunnel by Flow Field Measurements and CFD SimulationsDocument76 pagesThesis (2018) Verpaele, M. Assessment of The Performance of Mobile Fans in A Tunnel by Flow Field Measurements and CFD SimulationsAlekseiPas encore d'évaluation
- Eecs 2018 66Document52 pagesEecs 2018 66qh huangPas encore d'évaluation
- Evaluationof Synchronization Algorithmswith UPDocument67 pagesEvaluationof Synchronization Algorithmswith UPsaygun123Pas encore d'évaluation
- Microwave - Experiment 1 - Revision-Network Analyzer PDFDocument32 pagesMicrowave - Experiment 1 - Revision-Network Analyzer PDFariehashimiePas encore d'évaluation
- Sensing, Communication and Illumination With LED LightingDocument178 pagesSensing, Communication and Illumination With LED LightingSophia AsehPas encore d'évaluation
- Tesi Gustavo 12gen2006Document102 pagesTesi Gustavo 12gen2006Racim BenzPas encore d'évaluation
- Building-Integrated Photovoltaic Systems (BIPVS)Document150 pagesBuilding-Integrated Photovoltaic Systems (BIPVS)Daniel Tamata SolorioPas encore d'évaluation
- Photovoltaic Generator Design, Chen JINDocument3 pagesPhotovoltaic Generator Design, Chen JINMiguel EgidoPas encore d'évaluation
- Mostowska - Ortiz - Final Paper - 2019Document38 pagesMostowska - Ortiz - Final Paper - 2019Miguel EgidoPas encore d'évaluation
- Pengyun Huo y Feizhou Chen PDFDocument23 pagesPengyun Huo y Feizhou Chen PDFMiguel EgidoPas encore d'évaluation
- Manual IV-Generator PDFDocument6 pagesManual IV-Generator PDFMiguel EgidoPas encore d'évaluation
- TFM - Manuel Pastor - VFDocument62 pagesTFM - Manuel Pastor - VFMiguel EgidoPas encore d'évaluation
- Power Optimisation in PV Generators With MPPT Modules2Document1 pagePower Optimisation in PV Generators With MPPT Modules2Miguel EgidoPas encore d'évaluation
- REY Hugo R2A 2016-2017Document71 pagesREY Hugo R2A 2016-2017Miguel EgidoPas encore d'évaluation
- Lessons Learned From Rural Electrification Experiences With Third Generation Solar Home Systems in Latin America 2019 PDFDocument24 pagesLessons Learned From Rural Electrification Experiences With Third Generation Solar Home Systems in Latin America 2019 PDFMiguel EgidoPas encore d'évaluation
- Lessons Learned From Rural Electrification Experiences With Third Generation Solar Home Systems in Latin America 2019 PDFDocument24 pagesLessons Learned From Rural Electrification Experiences With Third Generation Solar Home Systems in Latin America 2019 PDFMiguel EgidoPas encore d'évaluation
- Technical Specifications For SHSs IDCOL January 2017Document23 pagesTechnical Specifications For SHSs IDCOL January 2017Miguel EgidoPas encore d'évaluation
- Z Series: VZ-80 Series Portable Radio - VHF/UHFDocument2 pagesZ Series: VZ-80 Series Portable Radio - VHF/UHFPrima SonyPas encore d'évaluation
- Sample Chapter - Oil and Gas Well Drilling Technology PDFDocument19 pagesSample Chapter - Oil and Gas Well Drilling Technology PDFDavid John100% (1)
- Quarter 4 Summative Test No. 1 Mga Layunin Code Bahagda N Bilang NG Aytem Kinalalagyan NG BilangDocument4 pagesQuarter 4 Summative Test No. 1 Mga Layunin Code Bahagda N Bilang NG Aytem Kinalalagyan NG Bilangmichelle milleondagaPas encore d'évaluation
- 9Y011-02704 KubotaDocument143 pages9Y011-02704 KubotaZaqi SatchPas encore d'évaluation
- Che 410 ................... Transition Metal ChemistryDocument13 pagesChe 410 ................... Transition Metal ChemistryElizabeth AnyangoPas encore d'évaluation
- Anue 3500 Qrs - 0Document2 pagesAnue 3500 Qrs - 0ullascsPas encore d'évaluation
- Testing, Adjusting, and Balancing - TabDocument19 pagesTesting, Adjusting, and Balancing - TabAmal Ka100% (1)
- Relay Maintenance and Testing: BenefitsDocument2 pagesRelay Maintenance and Testing: BenefitsojoladapoPas encore d'évaluation
- Pile FoundationDocument38 pagesPile FoundationChowdhury PriodeepPas encore d'évaluation
- Creating Attachments To Work Items or To User Decisions in WorkflowsDocument20 pagesCreating Attachments To Work Items or To User Decisions in Workflowselampe100% (1)
- TE-419891-001 - 862-U-2301 - BIOCIDE DOSING PACKAGE - Rev.BDocument12 pagesTE-419891-001 - 862-U-2301 - BIOCIDE DOSING PACKAGE - Rev.Brizwan.zamanPas encore d'évaluation
- Chapter 19. TemperatureDocument41 pagesChapter 19. TemperatureNguyên Nguyễn SơnPas encore d'évaluation
- Oculus SDK OverviewDocument47 pagesOculus SDK OverviewparaqueimaPas encore d'évaluation
- Solution To QuestionsDocument76 pagesSolution To QuestionsVipul AggarwalPas encore d'évaluation
- TitleDocument142 pagesTitleAmar PašićPas encore d'évaluation
- 6 Jazz Reading Exercise PDFDocument5 pages6 Jazz Reading Exercise PDFQuốc LiêmPas encore d'évaluation
- فيزياء لغات ثانوية عامة أنجليزى-webDocument462 pagesفيزياء لغات ثانوية عامة أنجليزى-webMohamed RayanyPas encore d'évaluation
- NATCO Presentation - Desalters PDFDocument12 pagesNATCO Presentation - Desalters PDFshahmkamalPas encore d'évaluation
- Basic Electronics Lab ManualDocument47 pagesBasic Electronics Lab ManualAlpesh ThesiyaPas encore d'évaluation
- DocuDocument77 pagesDocuDon'tAsK TheStupidOnesPas encore d'évaluation
- Slip Rings: SRI085 V100 - XX - XX - Xxx1XxDocument3 pagesSlip Rings: SRI085 V100 - XX - XX - Xxx1XxMatheus Henrique MattiaPas encore d'évaluation
- MoazzamMaqsood Transcript PDFDocument3 pagesMoazzamMaqsood Transcript PDFmoazzam maqsoodPas encore d'évaluation
- Type 85 Di Box DatasheetDocument2 pagesType 85 Di Box DatasheetmegadePas encore d'évaluation
- PRD Doc Pro 3201-00001 Sen Ain V31Document10 pagesPRD Doc Pro 3201-00001 Sen Ain V31rudybestyjPas encore d'évaluation
- KD-131 Asme Viii Div3Document2 pagesKD-131 Asme Viii Div3comar85Pas encore d'évaluation
- Pioneer Car Stereo System DVH-735AVDocument85 pagesPioneer Car Stereo System DVH-735AVJs LópezPas encore d'évaluation
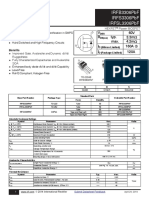
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligPas encore d'évaluation
- Watchgas AirWatch MK1.0 Vs MK1.2Document9 pagesWatchgas AirWatch MK1.0 Vs MK1.2elliotmoralesPas encore d'évaluation
- Data Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchDocument6 pagesData Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchMd Rubaiyat BhuiyanPas encore d'évaluation
- List of GHS Hazard Statement & PictogramsDocument33 pagesList of GHS Hazard Statement & PictogramsKhairul BarsriPas encore d'évaluation
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPND'EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNÉvaluation : 5 sur 5 étoiles5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsD'EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.D'EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Évaluation : 5 sur 5 étoiles5/5 (2)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsD'EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsPas encore d'évaluation
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsD'EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsPas encore d'évaluation
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZD'EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZPas encore d'évaluation
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionD'EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionÉvaluation : 5 sur 5 étoiles5/5 (4)
- Concise Guide to OTN optical transport networksD'EverandConcise Guide to OTN optical transport networksÉvaluation : 4 sur 5 étoiles4/5 (2)
- Designing and Building Security Operations CenterD'EverandDesigning and Building Security Operations CenterÉvaluation : 3 sur 5 étoiles3/5 (3)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityD'EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxD'EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (67)
- Software-Defined Networks: A Systems ApproachD'EverandSoftware-Defined Networks: A Systems ApproachÉvaluation : 5 sur 5 étoiles5/5 (1)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamD'EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamÉvaluation : 5 sur 5 étoiles5/5 (1)
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900D'EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Pas encore d'évaluation
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)D'EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Pas encore d'évaluation
- Mastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionD'EverandMastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionPas encore d'évaluation
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamD'EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamPas encore d'évaluation
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringD'EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringÉvaluation : 5 sur 5 étoiles5/5 (40)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationD'EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationPas encore d'évaluation