
Vous aimerez peut-être aussi
- Material de Formación - BioeconomiaDocument80 pagesMaterial de Formación - BioeconomiamanuelllePas encore d'évaluation
- Helenio HerreraDocument5 pagesHelenio HerreramanuelllePas encore d'évaluation
- JehúDocument3 pagesJehúmanuelllePas encore d'évaluation
- Josué (Personaje Bíblico)Document6 pagesJosué (Personaje Bíblico)manuelllePas encore d'évaluation
- Isaías (Profeta)Document5 pagesIsaías (Profeta)manuelllePas encore d'évaluation
- DavidDocument20 pagesDavidmanuelllePas encore d'évaluation
- JoabDocument1 pageJoabmanuelllePas encore d'évaluation
- Guillermo II de AlemaniaDocument16 pagesGuillermo II de AlemaniamanuelllePas encore d'évaluation
- SalomónDocument10 pagesSalomónmanuelllePas encore d'évaluation
- Jeroboam IDocument5 pagesJeroboam ImanuelllePas encore d'évaluation
- Memoria-MÓDULO 5 - MEJORAMIENTO DEL SISTEMA DE GESTIÓN DE SEGURIDAD Y SALUD EN EL TRABAJO PDFDocument76 pagesMemoria-MÓDULO 5 - MEJORAMIENTO DEL SISTEMA DE GESTIÓN DE SEGURIDAD Y SALUD EN EL TRABAJO PDFmanuelllePas encore d'évaluation
- Compañía de Cervecerías UnidasDocument3 pagesCompañía de Cervecerías UnidasmanuelllePas encore d'évaluation
- Deceuninck PDFDocument5 pagesDeceuninck PDFmanuelllePas encore d'évaluation
- Lógica (Moretti)Document5 pagesLógica (Moretti)monopolodediracPas encore d'évaluation
- Tema 6 - Nume - EnterosDocument7 pagesTema 6 - Nume - EnterosAlex MartPas encore d'évaluation
- Ensayo Números RealesDocument5 pagesEnsayo Números RealesK'Romana Mendozaa67% (6)
- EDO Series de PotenciasDocument39 pagesEDO Series de PotenciasJoshi Angie LlanosPas encore d'évaluation
- Taller Modelo Regresión FinalDocument18 pagesTaller Modelo Regresión FinalJOSE DAVID P007Pas encore d'évaluation
- Capitulo 2 Movimiento en Una DimensionDocument42 pagesCapitulo 2 Movimiento en Una Dimensionalessandra pacheco loayzaPas encore d'évaluation
- Convendio MatematicaDocument12 pagesConvendio MatematicaKervins Isaac Pineda CermeñoPas encore d'évaluation
- Taller Variables Aleatorias Discretas Universidad Sergio Arboleda ResueltoDocument8 pagesTaller Variables Aleatorias Discretas Universidad Sergio Arboleda ResueltoJonathan Berrio BeltranPas encore d'évaluation
- R1 Ejercicios (Integrales)Document7 pagesR1 Ejercicios (Integrales)naomy100% (2)
- Teorema de Pitágoras - Qué Es, Fórmulas y Aplicaciones - Toda MateriaDocument6 pagesTeorema de Pitágoras - Qué Es, Fórmulas y Aplicaciones - Toda MateriaALEXANDRAPas encore d'évaluation
- Practica #4 MAT360 15Document3 pagesPractica #4 MAT360 15EliannaPas encore d'évaluation
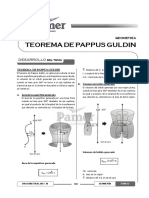
- Teorema de Pappus GuldingDocument2 pagesTeorema de Pappus GuldingAnonymous phAIWgucDtPas encore d'évaluation
- Ejemplo Densidad Lineal y Planar Hex (N.G)Document4 pagesEjemplo Densidad Lineal y Planar Hex (N.G)Edgar MorenoPas encore d'évaluation
- MARCO TEÓRICO ComplejosDocument3 pagesMARCO TEÓRICO ComplejosJanetPas encore d'évaluation
- Estadistica Inef MadridDocument43 pagesEstadistica Inef MadridPablo Camacho LazarragaPas encore d'évaluation
- Examen Parcial IN395 IOP1 20230 Solucionario-VeranoDocument4 pagesExamen Parcial IN395 IOP1 20230 Solucionario-Veranoalejandra sayagoPas encore d'évaluation
- Prueba Integral Matematica (4 - Sexto)Document2 pagesPrueba Integral Matematica (4 - Sexto)camiloags84Pas encore d'évaluation
- Una Variable Aleatoria X Puede Tomar Los Valores 30Document6 pagesUna Variable Aleatoria X Puede Tomar Los Valores 30Miguel Jesus Ramos SalasPas encore d'évaluation
- SESION - MAT-Representamos Cifras en El Tablero PosicionalDocument14 pagesSESION - MAT-Representamos Cifras en El Tablero Posicionalvero75% (4)
- Leopold KroneckerDocument3 pagesLeopold KroneckerDiego Gabriel FranciosiPas encore d'évaluation
- Ejercicio Alinemientos Horizontal y VerticalDocument7 pagesEjercicio Alinemientos Horizontal y VerticalJunior ZambranoPas encore d'évaluation
- Diagonalizacion en WolframDocument8 pagesDiagonalizacion en WolframRuby CaizaPas encore d'évaluation
- 5 Localización de La Línea de Pelo de TierraDocument4 pages5 Localización de La Línea de Pelo de Tierraسوسيدا اسماعيل100% (1)
- DocDocument15 pagesDocShovi Guiop huamanPas encore d'évaluation
- Artificios de IntegracionDocument10 pagesArtificios de IntegracionJosé Alejandro VargasPas encore d'évaluation
- REGRESIONDocument8 pagesREGRESIONhirvinPas encore d'évaluation
- Lab Álgebra Booleana - 2Document4 pagesLab Álgebra Booleana - 2marusya LunaPas encore d'évaluation
- Operaciones Con RacionalesDocument26 pagesOperaciones Con RacionalesLorena CollazosPas encore d'évaluation
- Experiencia 3 Samuel BaezDocument5 pagesExperiencia 3 Samuel BaezSamuel BaezPas encore d'évaluation
- Sec 2per Ci 2o2oDocument13 pagesSec 2per Ci 2o2oHector Carmelo Fierro MesaPas encore d'évaluation
- Fundamentos de matemática: Introducción al nivel universitarioD'EverandFundamentos de matemática: Introducción al nivel universitarioÉvaluation : 3 sur 5 étoiles3/5 (9)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleD'EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleÉvaluation : 5 sur 5 étoiles5/5 (3)
- Guía práctica para la refracción ocularD'EverandGuía práctica para la refracción ocularÉvaluation : 5 sur 5 étoiles5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalD'EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalÉvaluation : 5 sur 5 étoiles5/5 (3)
- Armónicas en Sistemas Eléctricos IndustrialesD'EverandArmónicas en Sistemas Eléctricos IndustrialesÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.D'EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Évaluation : 4.5 sur 5 étoiles4.5/5 (9)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiD'EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiÉvaluation : 3.5 sur 5 étoiles3.5/5 (5)
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadD'EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadÉvaluation : 4 sur 5 étoiles4/5 (11)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaD'EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaÉvaluation : 4 sur 5 étoiles4/5 (32)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaD'EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaÉvaluation : 5 sur 5 étoiles5/5 (5)
- Matemáticas básicas para economistas. Vol. 0. Fundamentos (Con notas históricas y contextos económicos)D'EverandMatemáticas básicas para economistas. Vol. 0. Fundamentos (Con notas históricas y contextos económicos)Pas encore d'évaluation
- Introducción a las ecuaciones de la física matemáticaD'EverandIntroducción a las ecuaciones de la física matemáticaÉvaluation : 5 sur 5 étoiles5/5 (4)



















































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-1-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)









