Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Modeling and Analysis of Spacecraft Stru AcousticExcit PDFDocument8 pagesModeling and Analysis of Spacecraft Stru AcousticExcit PDFAdamDPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- AnsysDocument216 pagesAnsysEmanuel CruvinelPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Comparison of Nonlinear Random Response Using Equivalent Linearization and Numerical SimulationDocument14 pagesComparison of Nonlinear Random Response Using Equivalent Linearization and Numerical SimulationAdamDPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- PDF - Physics - Introduction To Tensor Calculus and Continuum MechanicsDocument373 pagesPDF - Physics - Introduction To Tensor Calculus and Continuum Mechanicsburcumurcu100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Constitutive Modeling of Elastomers - Accuracy of Predictions and Numerical EfficiencyDocument19 pagesConstitutive Modeling of Elastomers - Accuracy of Predictions and Numerical EfficiencyAdamDPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Nastran 2019 Doc ReleaseDocument116 pagesNastran 2019 Doc ReleaseAdamDPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- HyperMesh Advanced Training PDFDocument122 pagesHyperMesh Advanced Training PDFSalih ÜnalPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Global Stiffness Analysis of Biw Structure: Sharanbasappa, E Sujith Prasd, Praveen MathDocument6 pagesGlobal Stiffness Analysis of Biw Structure: Sharanbasappa, E Sujith Prasd, Praveen MathAdamDPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- JUI-RPWI-ESA-EBOX-RP-Mechanical Analysis Report RPWI - Issue - 2 - Rev - 0 - SignedDocument134 pagesJUI-RPWI-ESA-EBOX-RP-Mechanical Analysis Report RPWI - Issue - 2 - Rev - 0 - SignedAdamDPas encore d'évaluation
- RBEs MPCs in MSC - NastranDocument91 pagesRBEs MPCs in MSC - NastranAdamDPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Patran 2019: Release GuideDocument34 pagesPatran 2019: Release GuideAdamD100% (1)
- ANSYS14 TheoryDocument1 166 pagesANSYS14 Theoryahh1359Pas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Ansysconf Paper 2004Document11 pagesAnsysconf Paper 2004Ajmal SalamPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- ANSYS 7.0 CAD Geometry Connections, Geometry Plugins, and Geometry ReadersDocument6 pagesANSYS 7.0 CAD Geometry Connections, Geometry Plugins, and Geometry ReadersAdamDPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Fatigue ANSYSDocument22 pagesFatigue ANSYSapi-3717939100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Implicit NonlinDocument536 pagesImplicit NonlinAdamDPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Paper Pronto3DDocument231 pagesPaper Pronto3DAdamDPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- Theory ALE CFD SPHDocument34 pagesTheory ALE CFD SPHSanthosh LingappaPas encore d'évaluation
- Chapter 27: Large Sliding Analysis of A BuckleDocument12 pagesChapter 27: Large Sliding Analysis of A BuckleDan WolfPas encore d'évaluation
- Dytran 2012 Example Problem Manual PDFDocument538 pagesDytran 2012 Example Problem Manual PDFAdamDPas encore d'évaluation
- Latihan 5 Hujan Aliran (Jawaban)Document40 pagesLatihan 5 Hujan Aliran (Jawaban)BarurRokhimPas encore d'évaluation
- 84C642121AC 17KG560 C1 980E - 5 or 930E - 4 QuadChopperDocument115 pages84C642121AC 17KG560 C1 980E - 5 or 930E - 4 QuadChopperLuz Robles100% (1)
- Aip LPPTDocument43 pagesAip LPPTJoão MartinhoPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Instruction Manual 862 MIR Multiple Temperature Selector With MPU, HPU or OPU BoardDocument20 pagesInstruction Manual 862 MIR Multiple Temperature Selector With MPU, HPU or OPU BoardNhatPas encore d'évaluation
- The Hub-And-Spoke Model - A TutorialDocument23 pagesThe Hub-And-Spoke Model - A TutorialFedele IannonePas encore d'évaluation
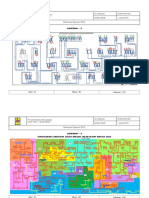
- TPC-HYD - Apartment Booklet - Phase 1 - V3Document25 pagesTPC-HYD - Apartment Booklet - Phase 1 - V3krissramPas encore d'évaluation
- Gdas DCB 2361853Document34 pagesGdas DCB 2361853Kosmic AdminPas encore d'évaluation
- Mangas.-Bidireccional - REVBDocument10 pagesMangas.-Bidireccional - REVBDanilo Camac FloresPas encore d'évaluation
- Mixer DesignDocument22 pagesMixer Designsohagiut100% (4)
- Third Rail SystemDocument18 pagesThird Rail SystemMaryam vafaee.nPas encore d'évaluation
- Updated Response Code ListDocument10 pagesUpdated Response Code ListFreechum8Pas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Guide For Applying For Doctoral Studies: For International Applicants at The University of MunichDocument4 pagesGuide For Applying For Doctoral Studies: For International Applicants at The University of Munichazerafla 01Pas encore d'évaluation
- Daily nutrition diary tracks macros and caloriesDocument19 pagesDaily nutrition diary tracks macros and caloriesSava KovacevicPas encore d'évaluation
- Scana Volda CPP DiagramDocument66 pagesScana Volda CPP DiagramAlejandro BautistaPas encore d'évaluation
- The 'Hilltopper-40' TransceiverDocument23 pagesThe 'Hilltopper-40' TransceiverBrian NetolickyPas encore d'évaluation
- Wborsa - BandsDocument3 pagesWborsa - BandsAmi NePas encore d'évaluation
- Calibration Certificate AnalysisDocument19 pagesCalibration Certificate AnalysisPurushottam JhaPas encore d'évaluation
- MBT Brackets Placements TechniqueDocument10 pagesMBT Brackets Placements TechniqueTricky90100% (1)
- Ethan Frome Quick Guide for Kollmorgen Control SystemDocument31 pagesEthan Frome Quick Guide for Kollmorgen Control SystemJibjab7Pas encore d'évaluation
- Jawa Bali 500kV Grid ConfigurationDocument205 pagesJawa Bali 500kV Grid ConfigurationekaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Minor MNGTDocument11 pagesMinor MNGTpradipta.sarkarPas encore d'évaluation
- Design Standards Accessible StationsDocument254 pagesDesign Standards Accessible StationsMECHKARTHIKRAJPas encore d'évaluation
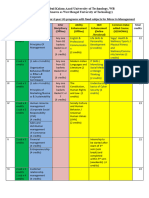
- Evaluation of Masters of Science in Accounting and Finance Curriculums: A Study On Selected Higher Education Institutions in EthiopiaDocument16 pagesEvaluation of Masters of Science in Accounting and Finance Curriculums: A Study On Selected Higher Education Institutions in Ethiopiaelias getachewPas encore d'évaluation
- The Academic Word ListDocument6 pagesThe Academic Word ListQuyen VuPas encore d'évaluation
- Bab 1 Introduction PJJDocument28 pagesBab 1 Introduction PJJPresidaPas encore d'évaluation
- T MSD309 3X T MSD309 3X T.MSD309.3X T.MSD309.3X Maintenance Manual Maintenance ManualDocument11 pagesT MSD309 3X T MSD309 3X T.MSD309.3X T.MSD309.3X Maintenance Manual Maintenance ManualAlejandro CidPas encore d'évaluation
- Ludlum Model 9-3 Ion Chamber: May 2020 Serial Number 261657 and Succeeding Serial NumbersDocument40 pagesLudlum Model 9-3 Ion Chamber: May 2020 Serial Number 261657 and Succeeding Serial NumbersFiliberto Conde MayoPas encore d'évaluation
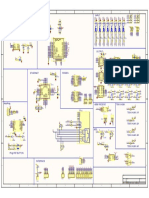
- KC868 A8 PCBV1.4Document1 pageKC868 A8 PCBV1.4Marek Duží100% (1)
- HPVL/SPVL Pilot Controls Technical DataDocument7 pagesHPVL/SPVL Pilot Controls Technical DataMichael AkhramovichPas encore d'évaluation
- SAY CITY COLLEGE TECHNOLOGY STUDENTS' PERFORMANCEDocument22 pagesSAY CITY COLLEGE TECHNOLOGY STUDENTS' PERFORMANCEAlther DabonPas encore d'évaluation