Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Cold Nuclear Fusion From Pons & Fleischmann To Rossi's E - CatDocument22 pagesCold Nuclear Fusion From Pons & Fleischmann To Rossi's E - CatGianfrancoSanchezPas encore d'évaluation
- Ch6 Dimension Units ConversionDocument15 pagesCh6 Dimension Units ConversionHamka HidayahPas encore d'évaluation
- Assignment 2Document3 pagesAssignment 2Manu K Vasudevan0% (1)
- Class Notes of Unit Electrostatics Part-4Document25 pagesClass Notes of Unit Electrostatics Part-4Parth Sarthi SharmaPas encore d'évaluation
- Details of Fluid MechanicsDocument25 pagesDetails of Fluid MechanicsJeevan RoyPas encore d'évaluation
- Vectors in Two Dimensions: What Is A Vector?Document13 pagesVectors in Two Dimensions: What Is A Vector?Lazarus MukwekwePas encore d'évaluation
- Relation To Other Fields: Difference Between Classical and Modern PhysicsDocument1 pageRelation To Other Fields: Difference Between Classical and Modern Physicspiping stressPas encore d'évaluation
- Numerical Analysis and Simulation of PlasticityDocument317 pagesNumerical Analysis and Simulation of Plasticitysrikanthrajaram18100% (1)
- Physics 23 - RadioactivityDocument34 pagesPhysics 23 - RadioactivityHakim Abbas100% (1)
- Virtual Work and Power BalanceDocument5 pagesVirtual Work and Power BalanceAlessio ScarabelliPas encore d'évaluation
- Microstrip AntennaDocument56 pagesMicrostrip AntennaPrajakta MorePas encore d'évaluation
- Gravitational Waves: Udit GuptaDocument22 pagesGravitational Waves: Udit GuptaphysicsdoodPas encore d'évaluation
- VCV ManualDocument30 pagesVCV Manualali_gudarzi2249Pas encore d'évaluation
- Form 4 Chapter 2 Paper 1Document82 pagesForm 4 Chapter 2 Paper 1FakhriahPas encore d'évaluation
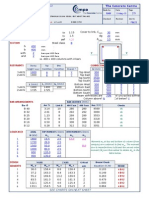
- TCC53 Column DesignDocument18 pagesTCC53 Column DesignVasileios Manginas100% (3)
- Aki and Larner 1970Document22 pagesAki and Larner 1970Jenni WangPas encore d'évaluation
- Sepam 100Document43 pagesSepam 100Emanuel PopaPas encore d'évaluation
- Static Force AnalysisDocument19 pagesStatic Force Analysiskreddy260100% (1)
- Ceva's TheoremDocument4 pagesCeva's TheoremKalpesh GuptaPas encore d'évaluation
- MATH 181-Oblique Triangles and Vectors (11) Term 0306Document16 pagesMATH 181-Oblique Triangles and Vectors (11) Term 0306SharmaineTaguitagOmliPas encore d'évaluation
- Datasheet DXDocument2 pagesDatasheet DXAsnawirarrr100% (2)
- Atomic Structure For Grade 10Document4 pagesAtomic Structure For Grade 10Aja AndersonPas encore d'évaluation
- Acs Chemmater 9b03775Document13 pagesAcs Chemmater 9b03775Modasser HossainPas encore d'évaluation
- 4 and 6 Pole MotorDocument6 pages4 and 6 Pole Motorarajamani78100% (1)
- Chapter5 RDocument37 pagesChapter5 Rsusovan56Pas encore d'évaluation
- (The Physical Appearance or Character of A Rock) : Describing TexturesDocument3 pages(The Physical Appearance or Character of A Rock) : Describing Texturesway2futurePas encore d'évaluation
- VectorsDocument9 pagesVectorsMohd Yousha AnsariPas encore d'évaluation
- Consistency of Standard Cement PasteDocument53 pagesConsistency of Standard Cement PasteLakshay SinghalPas encore d'évaluation
- Chapter 4Document24 pagesChapter 4afewerkPas encore d'évaluation