Académique Documents
Professionnel Documents
Culture Documents
TD Ds Examens
Transféré par
haythem mokdedTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
TD Ds Examens
Transféré par
haythem mokdedDroits d'auteur :
Formats disponibles
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 2 : TD , DS et Examens
2ème Année L. A Génie Electrique Page 37
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
TD1
1. STABILITE
E(p) S(p)
+
Soit le système suivant :
-
Trouver la condition sur k pour que le système soit stable.
2. PRECISION
On considère le même exemple précédent.
2.1. Calculer en fonction de K l'erreur statique de position et l'erreur statique de traînage.
2.2. Calculer k pour avoir une erreur statique de vitesse de 10%.
3. RAPIDITE
On considère le même exemple précédent.
3.1. Déterminer la valeur de K qui assure un dépassement inférieur ou égal à 6%
3.2. Cette valeur de K assure-t-il la stabilité du système.
3.3. Calculer la valeur du dépassement et du temps de pic.
2ème Année L. A Génie Electrique Page 38
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Solution :
1. Soit H(p) la fonction de transfert en boucle fermée.
3.k 3.k
H ( p) = = 3
p.(p + 1).(p + 3) + 3.k p + 4.p + 3.p + 3.k
2
L'équation caractéristique est: D(p) = p + 4.p + 3.p + 3.k
3 2
1ère condition : vérifiée si et seulement si: k>0
2ème condition : P3 1 3
P2 4 3.k
P1 (12-3.k)/4 0
P0 3.k
Pour que la deuxième condition soit vérifiée, il faut que:12-3.k>0 et 3.k>0.
Pour que le système soit stable il faut que:0<k<4.
2. Soit G(p) la fonction de transfert du système en boucle ouverte.
𝐸(𝑝)
ɛ(p) =
1 + G(p)
E ( p) p 3 + 4.p 2 + 3.p
( p) = = 3 .E(p)
1+
3.k p + 4.p 2
+ 3.p + 3.k
p.(p + 1).(p + 3)
• Erreur statique de position: ➔ E(p) = E .
p
p 3 + 4.p 2 + 3.p
E = 0
= lim ( t ) = lim p.(p) = lim p. =0→ .
p + 4.p + 3.p + 3.k p
t → p →0 p →0 3 2
E
• Erreur statique de vitesse: ➔ E(p) = 2 .
p
p 3 + 4.p 2 + 3.p E E E
= lim ( t ) = lim p.(p) = lim p. . = =
p + 4.p + 3.p + 3.k p
t → p →0 p →0 3 2 2 k
k
E
= 0,1 = 0,1
k k = 10.E
2ème Année L. A Génie Electrique Page 39
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
TD2
EXERCICE N° 1
Considérons un système représenté par la fonction suivante :
4
𝐺(𝑝) =
(1 + 50𝑝) (1 + 12𝑝)2
Ce système est asservi à l’aide d’un régulateur R(p) dans une boucle fermée à rétroaction négative unitaire
E(p) +
R(p) G(p) S(p)
I.R(p) = kp
Déterminer les valeurs de Kp pour lesquelles le système en boucle fermé est stable. (Routh)
II.R(p) = 1
1. Quels sont :
a) Le gain statique K du processus ?
b) Son ordre n ?
c) Sa classe ?
2. Ecrire la transmittance complexe T(jω) et en déduire :
a) L’équation du module de T(jω) (exprimé en dB), en fonction de ω,
b) L’équation de l’argument de T(jω), (noté φ et exprimé en degrés), en fonction de ω.
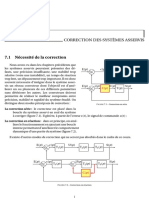
3. On donne ci-joint le tracé sur un abaque de Black de la réponse harmonique du système en boucle ouverte.
Déduire de cette courbe (figure 1) les grandeurs suivantes relatives à un asservissement par retour unitaire du
système.
a) La marge de gain MG (en dB)
b) La marge de phase Mφ (en degrés)
c) Le pic de résonnance
d) La pulsation de résonnance
e) L’erreur statique de position (en % )
f) Connaissant ces valeurs, conclure quant aux performances du système asservi.
2ème Année L. A Génie Electrique Page 40
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Figure 1 : Réponse harmonique
EXERCICE N° 2 : Système à retour quelconque
E(p) ɛ1 (p) S(p)
3
2
𝑝 + 2𝑝 + 2
+ -
1
𝑝
-
ɛ2 (p)
+
Faire l’étude statique des erreurs ɛ1 (p) et ɛ2 (p) pour les entrées de type échelon, rampe et accélération.
2ème Année L. A Génie Electrique Page 41
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
EXERCICE N°3
On considère le système représenté par le schéma fonctionnel suivant
E(p) 1 1
K S(p)
+ (1 + 𝑝)2 𝑝
-
On désigne par F(p) la fonction de transfert en boucle ouverte et H(p) sa fonction de transfert en boucle
fermée.
1- Calculer la fonction de transfert en boucle fermée du système.
2- A l’aide du critère de Routh, étudier la stabilité du système bouclé.
3- Calculer l’erreur permanente pour une entrée de type échelon unitaire.
4- On pose K =1
a- Donner l’expression de F(jw) et arg[F(jw)].
b- Compléter le tableau suivant:
W 0 0.1 0.2 0.3 0.4 0.5 0.75 1 1.2 1.4 1.6 2
FdB
arg[F(jw)]
c- Tracer le lieu de transfert en boucle ouverte dans le plan de Black
d- Déduire la marge de gain et la marge de phase.
EXERCICE N°4 : Critère de Naslin
On considère le système représenté par le schéma fonctionnel suivant avec k > 0 et τ > 0.
1 1
E(p) 𝑘(1 + ) S(p)
+ 𝜏𝑝 (𝑝 + 1)(𝑝 + 2)
-
1) - A l’aide du critère de Naslin, calculer les rapports caractéristiques αi :
2) - Pour un dépassement D% ≤ 6% et sans prise en compte du numérateur N(p),
Représenter l’hyperplan τ = f(k) et hachurer la zone ou le D% ≤ 6%.
Calculer le temps de pic Tp pour k = 2.5 et τ = 0.74s,
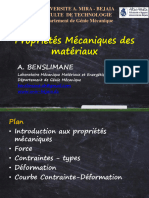
3) - On vous donne ci-dessous (figure 2) la réponse indicielle pour k = 2.5 et τ = 0.74s,
Déterminer graphiquement : Tp , Tm , Ts , D% , gain statique ks et l’erreur statique de position ɛp.
4) - Même question que (2), mais avec prise en compte du numérateur N(p), on donne pour :
𝑁(𝑝) 𝑏1 𝑝+𝑏0 ′ 𝑎0 𝑏1
𝐻 (𝑝) = = ; 𝛼 0 = 1.5 + 4( )( )(𝛼0 − 1.5)
𝐷(𝑝) 𝑎3 𝑝3 +𝑎2 𝑝2 +𝑎1 𝑝 +𝑎0 𝑎1 𝑏0
NB : Cette formule n’est applicable que pour un numérateur d’ordre 1
Figure 2 : Réponse indicielle pour k = 2.5 et τ = 0.75s
2ème Année L. A Génie Electrique Page 42
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
EXERCICE N°4 : Abaque de Black
On donne ci-dessous le tracé sur un abaque de Black de la réponse harmonique du système en boucle
ouverte.
Quels sont :
a) La classe α, l’ordre (n) et le gain statique (K) du processus en BO ?
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
b) Déduire de cette courbe les grandeurs suivantes relatives à un asservissement par retour
unitaire.
La marge de gain MG (en dB) ..................................................................................................
La marge de phase Mφ (en degrés) ..........................................................................................
Le pic de résonnance Mp(en dB)..............................................................................................
L’erreur statique de position (en %) ........................................................................................
c) Connaissant ces valeurs, conclure quant aux performances du système asservi
.................................................................................................................................................................
2ème Année L. A Génie Electrique Page 43
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
TD3
On considéré 1’asservissement suivant :
ɛ(p) U(p)
E(p) R(p) G(p) S(p)
Figure 1
Avec E(p) la consigne, U(p) la commande, R(p) le régulateur et G(p) représente le processus et est donnée
par les essais en régime harmonique suivants :
W(rd/s) 0.001 0.003 0.005 0.007 0.01 0 012 0.015 0.017 0.02 0.04 0.06
GdB 29.9 28.9 27.1 24.8 21 18.4 14.6 12.3 9 -6.9 -17
Arg(G) -17 -50 -80 -105 -135 -151 -169 -178 -190 -228 -241
1- Représenter sur le plan de black la transmittance du processus.
Que peut-on dire de la stabilité du processus en boucle fermée.
2- R(p)=k.
2-1- Déterminer le gain critique kc.
2-2- Calculer k pour avoir une marge de phase de 45°.
En déduire la marge de gain, le pic de résonance, la pulsation de résonance et la bande passante.
2-3- Calculer l’erreur statique de position.
3- R(p) = k(1+200p)
3-1- Pour k = 0.1, représenter le lieu de black du système en boucle ouverte.
3-2- Déterminer les marges de gain et de phase, le pic de résonance, la pulsation de résonance et la bande passante.
3-3-CalcuIer k pour avoir une marge de phase de 45°.
En déduire la marge de gain, le pic de résonance, la pulsation de résonance et la bande passante.
3-4-Pour cette dernière valeur de k, calculer l’erreur statique de position.
2ème Année L. A Génie Electrique Page 44
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2011
Exercice 1 :
Considérons un système représenté par la fonction suivante :
4
𝐺(𝑝) =
(1 + 50𝑝) (1 + 12𝑝)2
Ce système est asservi à l’aide d’un régulateur R(p) dans une boucle fermée à rétroaction négative unitaire
E(p) R(P) G(p) S(p)
III. R(p) = 1
4. Quels sont :
d) le gain statique K du processus ?
e) son ordre n ?
f) sa classe ?
5. Ecrire la transmittance complexe T(jω) et en déduire :
g) l’équation du module de T(jω) (exprimé en dB), en fonction de ω,
h) l’équation de l’argument de T(jω), (noté φ et exprimé en degrés), en fonction de ω.
6. On donne ci-joint le tracé sur un abaque de Black de la réponse harmonique du système en boucle
ouverte.
Déduire de cette courbe les grandeurs suivantes relatives à un asservissement par retour unitaire du
système.
c) La marge de gain MG (en dB)
d) La marge de phase Mφ (en degrés)
i) Le pic de résonnance
j) La pulsation de résonnance
k) L’erreur statique de position (en % )
l) Connaissant ces valeurs, conclure quant aux performances du système asservi
2ème Année L. A Génie Electrique Page 45
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
IV. R(p) = kp
1. Déterminer les valeurs de Kp pour les quelles le système en boucle fermé est stable. (Routh)
2. Tracer avec précision le lieu des pôles du système (avec Kp > 0). (echelle 1cm 0.01)
3. Démontrer par la méthode graphique les valeurs de Kp calculé dans II.1.
4. Etudier, suivant les valeurs de Kp, la stabilité et la nature du système en boucle fermée.
5. Déterminer les valeurs de Kp permettant de garantir une marge de stabilité absolue (𝜎 = −0.02).
Nichols Chart
20
1 dB -1 dB
3 dB
10
-3 dB
6 dB
0 -6 dB
Open-Loop Gain (dB)
-10 -12 dB
-20 dB
-20
-30
-40 dB
-40
-270 -225 -180 -135 -90 -45 0
Open-Loop Phase (deg)
2ème Année L. A Génie Electrique Page 46
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
DS Novembre 2011
Soit un système d’entrée u(t) et de sortie y(t) représenté par l’équation différentielle suivante :
10𝑦⃛(𝑡) + 17𝑦̈ (𝑡) + 8𝑦̇ (𝑡) + 𝑦(𝑡) = 4𝑢(𝑡)
1. Déterminer la transformée de Laplace du système puis donner sa fonction de transfert
𝑌(𝑝)
𝐻(𝑝) =
𝑈(𝑝)
4
2. On donne 𝐻(𝑝) = (1+𝑝)(1+2𝑝)(1+5𝑝)
Le système est mis dans une boucle de régulation avec une correction proportionnelle donné par
représentation suivante :
E(p) + k H(p) Y(p)
a) Déterminer la fonction de transfert en boucle fermée T(p).
b) En utilisant le critère de Routh, déterminer la condition de stabilité sur k. Quel est la valeur du gain
critique kc qui permet d’avoir la limite de stabilité.
3. Etude harmonique du système en boucle ouverte avec k=1
a) Cette étude nous a permis de remplir le tableau suivant :
ω(rad/s) 0,01 0,03 0,1 0,2 0,3 0,6 0,9 2
|𝐻(𝑗𝜔)|𝑑𝐵 12 11,9 10,9 8,2 5,2 -3,2 -10 -27
𝑎𝑟𝑔(𝐻(𝑗𝜔)) -4,5 -13,7 -43,6 -78 -104 -153 -180 -223,7
b) Représenter le système dans le diagramme de Bode, déterminer la marge de gain et la marge de phase
puis en déduire la stabilité du système en boucle fermée.
2ème Année L. A Génie Electrique Page 47
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2012
Z(p)
Asservissement de débit
Les élements de la boucle sont :
𝑺(𝒑) 𝟒
• Une vanne rotative dont la fonction de transfert est donnée par : G2(p) = Ѳ(𝒑)
= (𝟏+𝟎.𝟒𝒑)
S = débit de sortie, en (litre/s/rad )
Ѳ = position angulaire de l’arbre d’entrée de la vanne, en (rad).
𝑽(𝒑)
• Un débitmétre qui delivre une tension V, sa fonction de transfert : =𝟏
𝑺(𝒑)
• La vanne est entrainée en rotation par un motoréducteur ( moteur à courant continu à aiments permanents
Ѳ(𝒑) 𝟏
+ réducteur + amplificateur), asservi en position de fonction de transfert : G1(p) = 𝑼(𝒑)
= 𝒑(𝟏+𝟎.𝟓𝒑)
𝑿(𝒑)
• Un capteur de position qui délivre une tension X , sa fonction de transfert est : =𝟏
Ѳ(𝒑)
• Les capteurs (position et débit) permettent surtout de convertir des grandeurs physiques (position et débit)
en tensions afin de permettre la comparaison avec une consigne en boucle férmée.
• Le correcteur R1(p) = K1 de la boucle externe(primaire) d’asservissement de débit.
• Le correcteur R2(p) = K2 de la boucle interne(secondaire) d’asservissement de position.
2ème Année L. A Génie Electrique Page 48
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 1 - BOUCLE INTERNE : Asservissement de position de la vanne.
ɛ1
1. On étudie d’abord la boucle ouverte de l’ensemble motoréducteur, dont la fonction de transfert est G1(p).
On vous demande de déterminer :
a) L’ordre (n) : .............................................................................................................................................
b) La valeur des pôles :................................................................................................................................
2 c) La classe du systéme (α) :..........................................................................................................................
Le motoréducteur est-il stable en boucle ouverte ? Justifiez en considérant les pôles.
.....................................................................................................................................................................................
2. Pour R2(p) = K2 ,
Ѳ(𝒑)
a) Déterminer la fonction de transfert en boucle fermée : 𝒁(𝒑) =
𝑬𝟏(𝒑)
................................................................................................................................................................
................................................................................................................................................................
................................................................................................................................................................
1,5 ................................................................................................................................................................
................................................................................................................................................................
b) Pour quelles valeurs de K2 , le systéme de fonction de transfert Z(p) est-il stable ?
................................................................................................................................................................
................................................................................................................................................................
................................................................................................................................................................
................................................................................................................................................................
PARTIE 2 - BOUCLE EXTERNE : Asservissement de débit.
𝟎.𝟕𝟓
3. Pour la suite du probléme, on fixe 𝒁(𝒑) = (𝒑+𝟎.𝟓)(𝒑+𝟏.𝟓) , déduire alors la valeur de K2
................................................................................................................................................................
................................................................................................................................................................
0,5
................................................................................................................................................................
................................................................................................................................................................
2ème Année L. A Génie Electrique Page 49
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
4. Le schéma bloc global de l’installation se met alors sous la forme :
ɛ1
ɛ
a) Pour R1(p) = K1 ,
𝑆(𝑝)
déterminer la fonction la fonction de transfert en boucle ouverte noté 𝑇(𝑝) = , et celle
ɛ(𝑝)
𝑆(𝑝)
en boucle fermée, noté 𝐻(𝑝) =
𝐸(𝑝)
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
2
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
b) Etudier la stabilité par le critère de ROUTH, on déduire le gain critique Kc.
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
2 ....................................................................................................................................................
....................................................................................................................................................
c) Pour la valeur de K1= Kc , déterminer les pôles de la fonction de transfert en boucle fermée.
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
1,5
....................................................................................................................................................
....................................................................................................................................................
....................................................................................................................................................
2ème Année L. A Génie Electrique Page 50
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
d) Représenter le lieu des pôles de la fonction de transfert du système.
5
𝟕.𝟓 𝑲𝟏
On donne 𝑻(𝒑) =
(𝒑+𝟎.𝟓)(𝒑+𝟏.𝟓)(𝒑+𝟐.𝟓)
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................................................
2ème Année L. A Génie Electrique Page 51
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
e) Exploitation de l’abaque de Back :
On donne ci-dessous le tracé sur un abaque de Black pour K1 = 1 de la réponse harmonique du système en
boucle ouverte.
Déduire de cette courbe les grandeurs suivantes relatives à un asservissement par retour unitaire du
système.
• L’ordre du systéme (n) :...............................................................................................................
• La classe du systéme (α) :............................................................................................................
• La marge de gain MG(en db) :..........................................................................................
• La marge de phase Mφ(en degrés) :.................................................................................
• La pulsation de résonnance ɷr (en rad.s-1) :...................................................................
• La bande passante à (-3db) :...........................................................................................
• Conclure sur la stabilité du système :..............................................................................
5
0.5 rad/s
0.86 rad/s
1.76 rad/s
4.24 rad/s
7.3 rad/s
15 rad/s
f) Pour un gain K1 = 1 et une entrée échelon unitaire, calculer l’erreur statique de position ɛp en %.
..................................................................................................................................................................
0,5 ..................................................................................................................................................................
..................................................................................................................................................................
2ème Année L. A Génie Electrique Page 52
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2013
Exercice N°1 : (5 pts)
On considère un système de fonction de transfert en boucle ouverte :
G( p ) =
K
Avec ; K 0
( p + 3)2
On place ce système dans une boucle à retour unitaire. Déterminer la valeur de K qui assure au système en
boucle fermée une erreur de position égale à 5% .
Problème- Etude en boucle fermée : (15 pts)
Soit une chaîne d’asservissement à retour unitaire dont la transmittance en boucle ouverte est T ( p ) .
T ( p) =
1
p + 1.4 p + 2
2
B.1-
1. Calculer l’erreur statique pour une entrée échelon de position d’amplitude 5V
2. Calculer l’erreur statique pour une entrée échelon de vitesse d’amplitude 5V.
On intercale dans la chaîne directe un correcteur de fonction de transfert C ( p ) . Le schéma fonctionnel
du système est donné par la figure 1:
E(p) S(p)
C(p) T(p)
Figure 1
B2- Soit C ( p ) = k .
1. Etablir la fonction de transfert en boucle fermée du système.
2. Etudier la stabilité du système en fonction de k.
3. Exprimer l’erreur statique pour une entrée échelon de position de 5V en fonction de k.
4. Déduire la valeur de k permettant d’assurer une erreur de position de 1%.
B3- Soit C ( p ) =
k
.
p
1. Etablir la fonction de transfert en boucle fermée du système.
2. Etudier la stabilité du système en fonction de k.
3. Calculer l’erreur statique pour une entrée échelon de position d’amplitude 5V
4. Comparer les performances trouvées en B2 et B3 et conclure sur C ( p ) = k et C ( p ) =
k
.
p
2ème Année L. A Génie Electrique Page 53
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2014
NB : Les trois parties sont indépendantes
Soit un système d'entrée e(t), de sortie s(t) décrit par l'équation différentielle suivante:
𝒅𝟑 𝒔(𝒕) 𝒅𝟐 𝒔(𝒕) 𝒅𝒔(𝒕)
𝟑
+𝟑 𝟐
+𝟑 + 𝒔(𝒕) = 𝟐𝒆(𝒕)
𝒅𝒕 𝒅𝒕 𝒅𝒕
PARTIE 1 : Bode (10pts)
𝑺(𝒑) 𝟐
1. Montrer que la FTBO du processus peut se mettre sous la forme : 𝑻(𝒑) = =
𝑬(𝒑) (𝟏+𝒑)𝟑
S(p) et E(p) étant respectivement les transformées de Laplace des signaux s(t) et e(t).
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
...............................................
2. Montrer que l’expression du module de TdB(jɷ) peut se mettre sous la forme :
𝑇𝑑𝐵 (ɷ) = 6 − 30log(1 + ɷ2 ) .
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
3. Montrer que l’expression de l’Arg(T(jɷ)) peut se mettre sous la forme :
𝜑(ɷ) = −3Arctg(ɷ).
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
2ème Année L. A Génie Electrique Page 54
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
4. Calculer pour ɷ=1rd/s ; TdB(1) et φ(1).
.....................................................................................................................................................
.....................................................................................................................................................
5. Calculer la pulsation ɷ1 en (rd /s) pour que TdB(ɷ1) = 0dB.
.....................................................................................................................................................
.....................................................................................................................................................
6. Déduire alors la marge de phase Mφ = 180° + φ(ɷ1).
.....................................................................................................................................................
.....................................................................................................................................................
7. Calculer la pulsation ɷosc en (rd/s) pour que φ(ɷosc) = -180°.
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
8. Déduire alors la marge de gain MG = - 𝑇𝑑𝐵 (ɷosc ) .
.....................................................................................................................................................
.....................................................................................................................................................
9. Représenter les diagrammes asymptotiques de Bode de T(p) ainsi que son allure, sa marge
de gain MG et de phase Mφ.
TdB(ɷ)
10
0 ɷ
Φ°(ɷ)
0 ɷ
-90
-180
2ème Année L. A Génie Electrique Page 55
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 2 : Abaque de Black (6pts)
10. On donne ci-dessous le tracé sur un abaque de Black de la réponse harmonique du
système en boucle ouverte.
Nichols Chart
30
0.25 dB
0.5 dB
20 1 dB -1 dB
10 3 dB
Open-Loop Gain (dB)
-3 dB
6 dB
0 -6 dB
-10 -12 dB
-20 -20 dB
-30
-270 -225 -180 -135 -90 -45 0
Open-Loop Phase (deg)
Quels sont :
10.1. La classe α, l’ordre (n) et le gain statique (K) du processus en BO?
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
10.2. Déduire de cette courbe les grandeurs suivantes relatives à un asservissement par
retour unitaire.
10.2.1. La marge de gain MG (en dB).....................................................................................
10.2.2. La marge de phase Mφ (en egrés).................................................................................
10.2.3. Le pic de résonnance Mp(en dB)...................................................................................
10.2.4. L’erreur statique de position (en %)..............................................................................
10.3. Connaissant ces valeurs, conclure quant aux performances du système asservi.
............................................................................................................................................................................................
............................................................................................................................................................................................
2ème Année L. A Génie Electrique Page 56
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 3 : Critère de Routh (4pts)
11.Afin d’asservir la sortie s(t) à une consigne x(t) par un retour unitaire du système, on insère
dans le montage, entre le comparateur et le processus, un amplificateur de gain A réglable
Dessiner le schéma fonctionnel du système asservi en indiquant les grandeurs utiles.
............................................................................................................................................................................................
............................................................................................................................................................................................
............................................................................................................................................................................................
............................................................................................................................................................................................
............................................................................................................................................................................................
𝑺(𝒑)
12. Déterminer la FTBF noté par 𝐻(𝑝) = .
𝑿(𝒑)
............................................................................................................................................................................................
............................................................................................................................................................................................
............................................................................................................................................................................................
13. Par le critère de ROUTH, étudier la stabilité du système en fonction de A.
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
.....................................................................................................................................................
14. Déduire alors le gain critique Ac.
............................................................................................................................................................................................
2ème Année L. A Génie Electrique Page 57
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
DS Novembre 2014
Régulation d’altitude d’un ballon à air chaud
Dans ce problème, on se propose de réguler l’altitude d’un ballon à air chaud représenté schématiquement par
la figure 1.
w u
Figure 1 : Ballon à air chaud
Dans une analyse simplifiée de la dynamique d’un ballon à air chaud, les différentes grandeurs utilisées sont
les suivantes :
θ : différence de température entre l’air dans le ballon et l’air extérieur (°C),
u : signal de commande de la chaleur injectée (V),
v : vitesse verticale du ballon (m/s),
w : perturbation due à la vitesse du vent vertical (m/s),
h : altitude du ballon (m).
L’objectif de l’étude est de réguler la hauteur du ballon h(t), On notera e (t) la consigne d’altitude souhaitée.
1- Analyse du système (sans perturbation):
Les équations relatives au mouvement vertical du ballon sont :
d (t ) dv(t) dh(t)
= − a 0θ(t) + b0 u(t) , = − a1v(t) + b1 θ(t) et = v(t)
dt dt dt
Les différents coefficients relatifs à ces équations ont les valeurs numériques suivantes :
a0 =5 ; b0 =1 ; a1 =1 ; b1 =5
2ème Année L. A Génie Electrique Page 58
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
1.1-À partir des équations différentielles relatives au mouvement vertical du ballon, compléter le
schéma bloc (figure 2) permettant de représenter le système ayant u(t) comme entrée et h(t) comme
sortie.
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
u v h
θ
Figure 2
1.2. En notant H(p) et U(p) les transformées de Laplace respectives de h(t) et u(t).
Déterminer la fonction de transfert G(p) = H(p)/U(p) du système étudié.
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 59
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
2- Commande du système :
H ( p) b0b1 5
On admet par la suite que G( p) = = =
U ( p) p( p + a0 )( p + a1 ) p( p + 5)( p + 1)
Sachant que e(t) représente la consigne d’altitude, on boucle le système en appliquant la commande u(t)
telle que u(t)=[e(t)-h(t)]r(t), avec r(t) est un correcteur .
2.1. Déterminer le schéma fonctionnel du système bouclé.
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
2.2. Calculer la fonction de transfert en boucle fermée du système, noté par T(p).
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
2.3. On prend R(P) = K, en appliquant le critère de Routh, étudier la stabilité du système.
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 60
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
3- Etude harmonique :
On considère le système représenté par le schéma fonctionnel suivant avec G(P) désigne la fonction de
transfert en boucle ouverte: E(P) H(P)
K G(p)
+
-
3.1. On pose K =1, Donner l’expression de G(jw) et arg[G(jw)].
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
3.2. Compléter le tableau suivant:
w(rd /s) 0 0.01 0.05 0.1 0.75 0.84 1 2.21 2.46 10 50.48 107.46
GdB 25.92 0.47 -0.86 -15.34 -17.23 -88.25 -107.90
arg[G(jw)]° -93.46 -135.39 -139.36 -179.44 -184.05 -263.21 -266.80
3.3. Tracer le lieu de transfert en boucle ouverte dans le plan de BODE
3.4. Déduire la marge de gain MG et la marge de phase Mφ.
2ème Année L. A Génie Electrique Page 61
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2015
Problème : Régulation de température d’une enceinte
On désire réguler la température θ d’une enceinte à chauffage indirecte (voir figure N°1).
Figure N°1
v (t) tension de commande de la vanne
q (t) débit dans l’échangeur
θ1 température en sortie de l’échangeur
𝑄(𝑝) 1
Une vanne rotative dont la fonction de transfert est: =
𝑉(𝑝) 1+0.4𝑝
dθ1(t) dθ (t)
On donne les relations suivantes : θ (t) +
1 1 dt = k1 q(t) et θ (t) + 2 dt = k 2 θ1(t)
On suppose que toutes les conditions initiales sont nulles.
Pour les applications numériques, on prendra : τ1,=25s , τ 2=100s , k1=10 , k2=1
Partie 1
1.1- Compléter le schéma bloc pour le système, entrée V(p) et sortie θ(p).
Q(p) θ1(p) θ(p)
V(p)
1
1 + 0.4𝑝
𝛉 (𝐩)
1.2- Déterminer la fonction de transfert G (p)= 𝐕(𝐩)
……………………………………………………………………………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 62
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Partie 2
10
On admettra par la suite que : 𝐺(𝑝) = (1+0.4𝑝) (1+25𝑝)(1+100𝑝)
2.1- Etude d’une régulation proportionnelle : v (t) = k.( θref (t) - θ (t)).
θref (t) est la température de consigne.
2.1.1- Représenter le schéma bloc du système bouclé.
2.1.2- Donner l’expression de la fonction de transfert en boucle ouverte T(p).
…………………………………………………………………………………………………………….
2.1.3- Donner l’expression de la fonction de transfert en boucle fermée H(p).
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.1.4- Par le critère Routh, déterminer les valeurs de k pour lesquelles le système en boucle fermé est
stable.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.1.5- Calculer en fonction de k l'erreur statique de position Ɛp et l'erreur statique de traînage Ɛv.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.1.6- Calculer k pour avoir une erreur statique de position de 10%.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 63
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
2.1.7- Déterminer la valeur de k qui assure un dépassement inférieur ou égal à 6%.
………………………………………………………………………………………………………………..…
..…………………………………………………………………………………………………………………
2.1.8- Pour cette valeur de k, calculer le temps de pic Tpic en (s).
…………………………………………………………………………………………………………………
2.2- Etude d’une régulation proportionnelle et dérivée : v(p) = k.(1+0.1p).( θref (p) - θ (p)).
2.2.1- Calculer la nouvelle fonction de transfert en boucle fermée.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.2.2- Calculer en fonction de k l'erreur statique de position.
………………………………………………………………………………………………………………..
2.2.3- Calculer k pour avoir une erreur statique de vitesse de 10%.
…………………………………………………………………………………………………………………..
2.2.4- Déterminer la valeur de k qui assure un dépassement inférieur ou égal à 6%.
…………………………………………………………………………………………………………………..
2.2.5- Cette valeur de k assure-t-il la stabilité du système.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.2.6- Déduire alors le temps de pic Tpic en (s).
…………………………………………………………………………………………………………………..
2.2.7- Conclure sur l’avantage par rapport au régulateur proportionnel.
…………………………………………………………………………………………………………………
𝟐.𝟓
2.3- Etude d’une régulation proportionnelle et integrale : v(p) = k.(1+ 𝒑 ).( θref (p) - θ (p)).
2.3.1- Calculer la nouvelle fonction de transfert en boucle fermée.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.3.2- Calculer en fonction de k l'erreur statique de position.
…………………………………………………………………………………………………………………
2.3.3- Calculer k pour avoir une erreur statique de vitesse de 10%.
…………………………………………………………………………………………………………………
2.3.4- Déterminer la valeur de k qui assure un dépassement inférieur ou égal à 6%.
…………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 64
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
2.3.5- Cette valeur de k assure-t-il la stabilité du système.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2.3.6- Déduire alors le temps de pic Tpic en (s).
…………………………………………………………………………………………………………………
2.3.7- Conclure sur l’avantage par rapport au régulateur proportionnel
…………………………………………………………………………………………………………………
Partie 3
Le système est asservi à l’aide d’un régulateur R(p) dans une boucle fermée à rétroaction négative unitaire.
θref(p) R(p) G(p) θ(p)
R(p) = 1
3.1- Quels sont :
3.1.1- Le gain statique k du processus ?.......................................................................................
3.1.2- Son ordre n ?......................................................................................................................
3.1.3- Sa classe α ?......................................................................................................................
3.2- Ecrire la transmittance complexe T(j𝛚) et en déduire :
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
3.2.1- L’équation du module de T(j𝛚) (exprimé en dB), en fonction de 𝛚,
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
3.2.2- L’équation de l’argument de T(j𝛚), (noté 𝛗 et exprimé en degrés), en fonction de 𝛚.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 65
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
On donne ci-joint le tracé sur un abaque de Black de la réponse harmonique du système en boucle ouverte.
3.3- Déduire de cette courbe les grandeurs suivantes relatives à un asservissement par retour unitaire du système.
3.3.1- La marge de gain MG (en dB)………………………………………………………………..
3.3.2- La marge de phase M𝛗 (en degrés)……………………………………………………………
3.3.3- Le pic de résonnance MP (en dB)………………………………………………………………
3.3.4- La pulsation de résonnance 𝛚R…………………………………………………………………
3.3.5- L’erreur statique de position ƐP (en % )………………………………………………………
3.3.6- Connaissant ces valeurs, conclure quant aux performances du système asservi.
…………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 66
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
DS Novembre 2015
Exercice (1) : Analyse d’un système incertain (6 points)
Les systèmes industriels sont généralement des systèmes incertains. Cette incertitude due généralement aux
erreurs de modélisation et de mesure. Dans cet exercice, on traite l’analyse de stabilité de cette catégorie des
systèmes.
On représente un système avec une incertitude additive en sortie de la manière suivante :
𝐄(𝐩) 𝐒(𝐩)
K H0 (p)
0.12
Avec H0 (p) = et ∆ est l’incertitude tel que ∆∈ [−0.25 , 0.25]
p(10p+1)(2p+1)
1- Pour ∆= 𝟎
S(p)
a- Déterminer la fonction de transfert : HBO (p) = .
E(p)
…………………………………………………………………………………………
…………………………………………………………………………………………
………………………………………………………………………………………
b- Donner le schéma bloc du système en boucle fermée pour un asservissement à retour unitaire.
c- Déterminer avec le critère de Routh les conditions sur K pour que le système soit stable en boucle
fermée pour un asservissement à retour unitaire.
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
……....…………………………………………………………………………………
…………………………………………………………………………………………
………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 67
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
1. Pour ∆≠ 𝟎
S(p)
a- Déterminer la fonction de transfert : HBO (p) = E(p)
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
b- Donner le schéma bloc du système en boucle fermée pour un asservissement à retour unitaire.
c- Montrer en utilisant le critère de Routh pour que le système soit stable en boucle fermée à retour
unitaire. que 𝐊 ∈ ]𝟎 , 𝟒[ ,
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
…….... …………………………………………………………………………………
…………………………………………………………………………………………
Exercice (2) : Modélisation et commande d’un moteur à courant continu (12 points)
La machine à courant continu peut être modélisée par l’ensemble des équations électriques, électromécaniques
et mécaniques. Ces équations sont définies comme suit :
𝑑𝑖(𝑡) 𝐶𝑚 − 𝐶𝑟 = 𝐽.
𝑑𝛺(𝑡)
+ 𝑓. 𝛺(𝑡) (2)
𝑈 = 𝑅. 𝑖(𝑡) + 𝐿. + 𝐸 (1) 𝑑𝑡
𝑑𝑡
𝐸 = 𝐾𝑒 . 𝛺(𝑡) (3) 𝐶𝑚 = 𝐾𝑐 . 𝑖(𝑡) (4)
Avec :
U : tension aux bornes de l’induit, J : moment d’inertie ramené sur l’arbre du moteur,
i(t) : courant dans l’induit Ke et Kc : sont respectivement les constantes
R et L : résistance et inductance de l’induit, du f.e.m (V/rad/s) et du couple (N.m/A),
E : f.e.m , Cm : couple moteur et Cr : couple 𝛺(𝑡) : vitesse de rotation de l’arbre moteur en rad/s
résistant.
f : coefficient de frottement
2ème Année L. A Génie Electrique Page 68
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
1- En passant par la transformée de Laplace des équations (1), (2), (3) et (4), compléter le schéma bloc
de la machine à courant continu suivant :
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
Cr (p)
U(p) Ω(p)
………………… ……… …………………
………
On limite notre étude au fonctionnement à vide du moteur tel que Cr (p) = 0
Ω(p)
2- Déterminer la fonction de transfert H0 (p) = U(p) pour Cr (p) = 0 .
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
On donne: R=0.62 Ohm, L=0,012 H, J=0.4 Kg.m2 , f=0.125 Nm/rad/s, Ke=Kc=1.25 Vrad/s,
3- Déterminer les pôles de ce système.
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
L’asservissement de vitesse à retour unitaire du moteur est donné par la figure suivante :
Ωref (p) Ω(p)
K H0 (p)
260.4
Avec : H0 (p) = et K > 0
p²+52p+341.7
2ème Année L. A Génie Electrique Page 69
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Ω(p)
4- Déterminer la fonction de transfert HBF (p) =
Ωref (p)
………………………………………………………………………………………………………..
5- En utilisant le critère de Routh, déterminer les valeurs limite de K pour que ce système soit stable en
boucle fermée.
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
…………………………………………………………………………………………………………
6- Vérifier les résultats obtenus en calculant les pôles du système en boucle fermée.
…………………………………………………………………………………………………………
………………………………………………………………………………………………………….
…………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 70
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
DS Novembre 2016
Asservissement de la position d’un laser chirurgical
Les lasers ont été utilisés en chirurgie de l’œil depuis plus de 25 ans. Ils peuvent couper les tissus ou aider à
la coagulation. Les lasers permettent à l’ophtalmologiste d’appliquer des soins à une zone précise de l’œil
d’une façon précise et contrôlée.
Le contrôle automatique de la position (Figure 1) permet à l’ophtalmologiste d’indiquer au système où
l’opération doit être effectuée. Le contrôleur va alors employer une caméra en utilisant la rétine du patient
comme mire pour déterminer la bonne position du dispositif.
Figure 1 : Dispositif de l’asservissement de position du laser
La Figure 2 représente le modèle de comportement de cet asservissement de position :
Position Contrôleur Caméra et Laser Position
Désirée atteinte
E(p) S(p)
+ k G(p)
-
1+λp
Figure 2 : Schéma bloc de l’asservissement de position du laser
Sur la figure 2, E(p) représente la variation de consigne de position, S(p) la variation de position, G(p) la
fonction de transfert du processus constitué par la caméra et le laser, k le gain du contrôleur.
𝟏
La fonction de transfert du processus s’écrit :𝑮(𝒑) =
𝒑(𝒑+𝟏)(𝒑+𝟐)
2ème Année L. A Génie Electrique Page 71
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 1: Stabilité par Critère de Routh (10pts)
Question 1 : Déterminer l’importance de chacun des critères de performance (précision, stabilité et rapidité)
d’un système asservi par rapport au problème actuel.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
𝑆(𝑝)
Question 2 : Calculer la fonction de transfert en boucle fermée H(p) =
𝐸(𝑝)
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Question 3 : Etudier la stabilité en utilisant le critère de Routh.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Question 4 : Déduire le domaine de stabilité dans l’hyperplan λ=f(k)
…………………………………………………
…………………………………………………
………………………………………………… λ=f(k)
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
………………………………………………… k
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
…………………………………………………
2ème Année L. A Génie Electrique Page 72
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Question 5 : Pour λ=0, Etudier la stabilité en utilisant le critère de Routh, déduire le gain critique kc .
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
PARTIE 2 : Stabilité par critère de revers (10pts) :
Question 6 : Chercher la fonction de transfert en boucle ouverte, notée par T(p).
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
Question 7 : On prendra k = 6 et λ=0 ;
Donner les expressions du module TdB(ɷ) et de l’Argument 𝝋(ɷ) de T(jɷ) :
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
Question 8 : Calculer la pulsation ɷosc en (rd/s) pour que φ(ɷosc) = -π
𝒕𝒂𝒏𝒈(𝑨)+𝒕𝒂𝒏𝒈(𝑩)
NB : 𝒕𝒂𝒏𝒈(𝑨 + 𝑩) = 𝟏− 𝒕𝒂𝒏𝒈(𝑨).𝒕𝒂𝒏𝒈(𝑩)
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
2ème Année L. A Génie Electrique Page 73
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Question 9 : Déduire alors la marge de gain MG = - 𝑻𝒅𝑩 (ɷ𝐨𝐬𝐜 ) en (dB)
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
Question 10 : Conclure sur la stabilité du système.
…………………………………………………………………………………………………………………
Question 11 : On donne ci-dessous le tracé de Bode de la réponse harmonique du système en boucle
ouverte pour k = 3 et λ = 0.5
Tracer puis déduire de ces courbes les grandeurs suivantes :
La marge de gain MG (en dB)…………………………………………………………………………………
La marge de phase Mφ (en degrés)……………………………………………………………………………
Connaissant ces valeurs, conclure sur la stabilité du système. …………………………………………………
2ème Année L. A Génie Electrique Page 74
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Décembre 2016
ASSERVISSEMENT DE DEBIT
I. Présentation du système :
Soit le procédé suivant, destiné à la régulation du débit à travers une canalisation. Il utilise comme actionneur une
vanne dont la position du clapet est asservie au courant de commande par un servomoteur électropneumatique
intégré à la vanne. Le capteur est constitué d'un débitmètre volumique fournissant un signal analogique
proportionnel au débit.
Action Mesure
Conditionnement
Alimentation
Débimètre
en eau
S ( p)
= G( p ) =
1
Le modèle du système est le suivant : . Ce système est asservi à l’aide d’un régulateur
U ( p) (1 + p) 2
R( p ) =
k
; (k , τ) > 0 dans une boucle fermée à rétroaction négative unitaire.
1 + p
ɛ(p) U(p) S(p)
E(p) +
R(p) G(p)
II. Etude temporelle :
1 pt
𝑆(𝑝)
Question 1 : Calculer la fonction de transfert en boucle fermée H(p) =
𝐸(𝑝)
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
Question 2 : Etudier en fonction de k, la stabilité en utilisant le Critère de Routh.
2 pts
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 75
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Question 3 : Calculer en fonction de k l’erreur permanente ɛp (∞) en % pour une entrée de type échelon unitaire :
……………………………………………………………………………………………………………………………………………………………………………………
2 pts
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
Question 4 : Remplir le tableau de valeur et représenter ɛp (∞) en % fonction de k :
2 pts
ɛp (∞) en % k ɛp (∞) en %
0.25
0.5
0.71
20
0.88
k
0 1
0.1
Question 5 : A l’aide du Critère de Naslin, calculer en fonction de k les rapports caractéristiques αi :
……………………………………………………………………………………………………………………………………………………………………………………
2 pts
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………… ……………………………………………………………………………………
Question 6 : En se référant à la question (5), remplir le tableau ci-dessous puis représenter D% fonction de k :
α0 1.5 1.6 1.75 2 2.4
D%
k
2ème Année L. A Génie Electrique Page 76
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
On donne : Log(D%)=4.8-2α0
D%
2 pts
20
k
0 0.1
Question 7: On vous donne ci-dessous (figure 1) la réponse indicielle pour k = 0.5 et τ = 1s,
Déterminer graphiquement : Tp ,Tm ,Tr 5% ,D% ,gain statique en BF kF et l’erreur statique de position ɛp.
3 pts
Tp =……………
Tm =……………
Tr 5%=..................
D%=.....................
ks =…………….
III. Etude harmonique :
Question 8: On prendra T ( p ) =
0.5
comme fonction de transfert en boucle ouverte, 1.5pts
(1 + p) 3
Donner les expressions du module TdB(ɷ) et de l’Argument 𝝋(ɷ) de T(jɷ) :
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 77
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Question 9:
On donne ci-joint le tracé sur un abaque de Black de la réponse harmonique du système en boucle ouverte.
Déduire de cette courbe (figure 2) les grandeurs relatives à un asservissement par retour unitaire du système.
4 pts
a) Ordre du système (n)………………………………
b) Classe du système (α)………………………………
c) Le gain statique en BO (kO)…………………………
………………………………………………………
d) Le gain statique en BF (kF)…………………………
………………………………………………………
e) La marge de gain MG (en dB)……………….………
f) La marge de phase Mφ (en degrés)…………………
g) Le pic de résonnance MP(en dB)……………………
h) L’erreur statique de position (en % )………………..
……………………………………………………....
Question 10: Connaissant ces valeurs, conclure quant aux performances du système asservi.
0.5pt
……………………………………………………………………………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 78
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
DS Novembre 2017
NB : Les parties sont indépendantes
Soit un système d'entrée e(t), de sortie s(t) décrit par l'équation différentielle suivante:
𝒅𝟑 𝒔(𝒕) 𝒅𝟐 𝒔(𝒕) 𝒅𝒔(𝒕)
𝟑
+ 𝟑 𝟐
+𝟑 + 𝒔(𝒕) = 𝟐𝒆(𝒕)
𝒅𝒕 𝒅𝒕 𝒅𝒕
PARTIE A: Bode (10pts)
𝑺(𝒑) 𝟐
1. Montrer que la FTBO du processus peut se mettre sous la forme : 𝑻(𝒑) = 𝑬(𝒑)
= (𝟏+𝒑)𝟑
S(p) et E(p) étant respectivement les transformées de Laplace des signaux s(t) et e(t).
..............................................................................................................................................................................................
..............................................................................................................................................................................................
1.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
.......................................................................................................................................
2. Donner l’expression du module en (dB) de T(jɷ): noté par 𝑇𝑑𝐵 (ɷ).
..............................................................................................................................................................................................
..............................................................................................................................................................................................
1.5
..............................................................................................................................................................................................
..................................................................................................................................................
3. Donner l’expression de l’Argument deT(jɷ) en (°): noté par 𝜑(ɷ).
..............................................................................................................................................................................................
..............................................................................................................................................................................................
1.5
.............................................................................................................................................................
4. Compléter le tableau des valeurs suivant :
ɷ 0.1 0.2 0.4 0.5 0.6 0.7 0.8 0.9 1 2 4 5 6 8 9 10
𝑇𝑑𝐵 (ɷ) ? 5.5 4.08 3.09 1.99 0.795 -0.463 -1.75 ? -15 -30.9 -36.4 -41 -48.4 -51.4 ?
𝜑(ɷ)° ? -34 -65.6 -79.8 -92.9 -105 -116 -126 ? -190 -228 -236 -242 -249 -251 ?
..............................................................................................................................................................................................
..............................................................................................................................................................................................
............................................................................................................................................................. 1.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
.............................................................................................................................................................
2ème Année L. A Génie Electrique Page 79
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
5. Représenter le système dans le diagramme de Bode, déterminer la marge de gain MG et la marge de phase Mφ
puis en déduire la stabilité du système en boucle fermée.
6. Calculer le gain critique Kc,
..................................................................................................................................................................................
2ème Année L. A Génie Electrique Page 80
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE B: (10pts)
Soit une chaîne d’asservissement à retour unitaire dont la transmittance en boucle ouverte est T ( p ) .
𝑺(𝒑) 𝟐 1
𝑻(𝒑) = =
𝑬(𝒑) (𝟏+𝒑)𝟑
B.1-
7. Donner l’ordre, la classe et gain statique de la FTBO , puis calculer l’erreur statique pour une entrée échelon de
position d’amplitude 5V
..............................................................................................................................................................................................
..............................................................................................................................................................................................
..............................................................................................................................................................................................
1.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
..............................................................................................................................................................................................
8. Calculer l’erreur statique pour une entrée échelon de vitesse d’amplitude 5V.
..............................................................................................................................................................................................
..............................................................................................................................................................................................
0.5
..............................................................................................................................................................................................
.........................................................................................................................................
...................................................................................................................................................................................
On intercale dans la chaîne directe un correcteur de fonction de transfert C ( p ) . Le schéma fonctionnel du système
est donné par la figure 1:
E(p) S(p)
C(p) T(p)
Figure 1
B2- Soit C ( p ) = k .
9. Etablir la fonction de transfert en boucle fermée du système.
..............................................................................................................................................................................................
..............................................................................................................................................................................................
0.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
.......................................................................................................................................
2ème Année L. A Génie Electrique Page 81
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
10. Etudier la stabilité du système en fonction de k.
..............................................................................................................................................................................................
..............................................................................................................................................................................................
..............................................................................................................................................................................................
..............................................................................................................................................................................................
1.5
........................................................................................................................................................................
11. Exprimer l’erreur statique pour une entrée échelon de position de 5V en fonction de k.
..............................................................................................................................................................................................
..............................................................................................................................................................................................
....................................................................................................................................................... 1
..............................................................................................................................................................................................
........................................................................................................................................................................
12. Déduire la valeur de k permettant d’assurer une erreur de position de 1%.
..............................................................................................................................................................................................
................................................................................................................................................................. 0.5
B3- Soit C ( p ) =
k
.
p
13. Etablir la fonction de transfert en boucle fermée du système.
..............................................................................................................................................................................................
..............................................................................................................................................................................................
0.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
14. Etudier la stabilité du système en fonction de k.
..............................................................................................................................................................................................
1.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
..............................................................................................................................................................................................
15. Donner l’ordre, la classe et le gain statique de la FTBO, puis calculer l’erreur statique pour une entrée échelon de
position d’amplitude 5V
..........................................................................................................................................................................
..............................................................................................................................................................................................
1.5
..............................................................................................................................................................................................
..............................................................................................................................................................................................
16. Comparer les performances trouvées en B2 et B3 et conclure sur C ( p ) = k et C ( p ) =
k
.
p 1
...............................................................................................................................................................................
2ème Année L. A Génie Electrique Page 82
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2018
Régulation de température d’un dégazeur thermique
Un dégazeur est utilisé pour réduire la concentration en oxygène (O2), et en gaz carbonique (CO2) dans l'eau. Il est
utilisé pour le traitement de l'eau d'appoint des chaudières industrielles. La diminution des taux d'oxygène et du gaz
carbonique réduit les risques de corrosion. L’élimination se fait par création d’une atmosphère privée de ces gaz à la
surface intime de l’eau de ruissellement. De plus, la propriété des gaz d’être d’autant moins solubles que la pression est
faible et la température est élevée, est utilisée.
Pour cela, l’eau contenue dans le dégazeur est maintenue à une légère pression (0.3 à 0.7 bar) et à la température
d’évaporation correspondante (107 à 115 °C). Elle se trouve ainsi en légère ébullition (vaporisation). Le mélange de
vapeur et du gaz cédé par l’eau d’alimentation, est évacue à l’atmosphère par un évent (sortie d’échappement), au fur et
à mesure qu’il se forme.
La figure (1) suivante représente le schéma de régulation de la température réglée en agissant sur le débit de vapeur.
Sortie d’échappement
T’
TIC TY Légende :
Température de Qe TE : Sonde pour la mesure
référence Tr de température
M
Eau
TY : Module permettant de
Y TE convertir un signal tension
en signal courant
TIC : Régulateur industriel
composé d’un comparateur
et un correcteur
TV : Vanne de réglage de
Qv débit équipe d’un
positionneur
Vapeur TV Evacuation vers
-figure (1)- chaudière
Le schéma fonctionnel simplifié de l’installation est donne par la figure (2) suivante:
Correcteur C(p)
Procédé
physique T(p)
Tr(p) ɛ(p) Y(p)
𝑲𝟏 G(p)
T’(p) 𝐊𝟐
𝐩
1-τp
Capteur + convertisseur
-figure (2)-
Où Tr(p) est la température de référence, T(p) est la température dans le dégazeur et ɛ(p) = Tr(p)- T’(p) est l’erreur
2
statique. Avec : G(p) = (p+0.4)(p+1.5)
2ème Année L. A Génie Electrique Page 83
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Partie A – Etude temporelle :
A1. On donne 𝐊 𝟏 = 𝐊 𝟐 = 𝟎 et τ = 0.1s
Y(p)
1°/ Déterminer la fonction de transfert simplifiée du correcteur C(p) =
ɛ(p)
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………………
T(p)
2°/ Déterminer la fonction de transfert en boucle fermée H(p) =
Tr (p)
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
0.5
…………………….………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………
3°/ Le système est-il stable en boucle fermée ? Expliquer.
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………….……………………
…………………………………………
4°/ Déterminer la classe α de ce système et le gain statique en boule ouverte KO
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………….
5°/ Calculer l’erreur statique de position pour un échelon d’amplitude 100 °C.
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………………
A2. On donne 𝐊 𝟏 > 𝟎 ; 𝐊 𝟐 = 𝟎 et τ = 0.1s
Y(p)
1°/ Déterminer la fonction de transfert simplifiée du correcteur C(p) = ɛ(p)
en fonction de 𝐊 𝟏 .
…………………………………………………………………………………………………………………………… 0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………
T(p)
2°/ Déterminer la fonction de transfert en boucle fermée H(p) = T (p) en fonction de 𝐊 𝟏 .
r
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
…………………….………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
…………………………………………………………………………………………….……
2ème Année L. A Génie Electrique Page 84
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
3°/ Etudier la stabilité du système en utilisant le critère de Routh et en déduire le gain critique 𝐊 𝟏𝐜
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
1
…………………….………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………
4°/ Déterminer la classe α de ce système et le gain statique en boule ouverte KO
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………
5°/ Déterminer l’erreur statique de position pour un échelon d’amplitude 100 °C pour 𝐊 𝟏 = 𝟏.
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………
A3. On donne 𝐊 𝟏 = 𝟏 ; 𝐊 𝟐 > 𝟎 et τ = 0.1s
Y(p)
1°/ Déterminer la fonction de transfert du correcteur C(p) = ɛ(p)
en fonction de 𝐊 𝟐 .
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
…………………………………………………………………………………………………
T(p)
2°/ Déterminer la fonction de transfert en boucle fermée H(p) = T en fonction de 𝐊 𝟐
r (p)
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
…………………….………………………………………………………………………
3°/ Etudier la stabilité du système en utilisant le critère de Routh et en déduire le gain critique 𝐊 𝟐𝐜
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
1
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
…………………………………………………………………..……
4°/ Déterminer la classe α de ce système et le gain statique en boule ouverte KO
0.5
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………
5°/ Déterminer l’erreur statique de position pour un échelon d’amplitude 100 °C.
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
0.5
……………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 85
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
A4. Sur la figure 3, on donne les réponses indicielles : pour 𝐊 𝟏 = 𝐊 𝟐 = 𝟎 et τ = 0.1s → Partie A1
Pour 𝐊 𝟏 = 𝐊 𝟐 = 𝟏 et τ = 0.1s → Partie A3
-figure (3)-
A partir de (la figure 3) remplir le tableau suivant et identifier la réponse indicielle correspondante à chaque partie4
(A1 ou A3) puis conclure sur les performances du système asservi.
Réponse indicielle ① ②
Dépassement D%
Temps de pic Tp(s)
Temps de monté Tm(s)
Temps de réponse à ±5% Tr (s)
Gain statique en boucle fermé kF
Gain statique en boucle ouvert kO
Erreur statique de position ɛp en %
Partie (A1 ou A3) 0.5
Conclure……………………………………………………………………………………………………………………………………………………………………
………………………………………………
2ème Année L. A Génie Electrique Page 86
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Partie B : Etude harmonique : Pour 𝐊 𝟏 = 𝟏 ; 𝐊 𝟐 = 𝟑 et τ = 0s
Y(p)
1°/ Déterminer la fonction de transfert du correcteur C(p) =
ɛ(p)
0.5
…………………………………………………………………………………………………………………………
T′(p)
2°/ Déterminer la fonction de transfert en boucle ouverte F(p) =
ɛ(p)
…………………………………………………………………………………………………………………………… 0.5
3°/ Donner les expressions du module FdB(ɷ) et de l’Argument 𝝋(ɷ) de F(jɷ) .
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
1.5
On donne ci-joint le tracé sur un abaque de Black de la réponse harmonique du système en boucle ouverte.
-figure (4)-
4°/ Déduire de cette courbe (figure 4) les grandeurs relatives à un asservissement par retour unitaire du système.
- L’ordre du système n……………………………………………………………………………
- La classe du système α……………………………………………………………………………
- La marge de gain MG (en dB)……………………………………………………………….…..
- La marge de phase M𝛗 (en degrés)………………………………………………………..…… 4
- Le pic de résonnance MP (en dB)……………………………………………………………..…
- Le gain statique en boucle fermé KF……………………………………………………………
- Le gain statique en boucle ouvert Ko……………………………………………………………
- L’erreur statique de position ƐP (en % )…………………………………………………………
5°/ Connaissant ces valeurs, conclure quant aux performances du système asservi. 0.5
.............................................................................................................................................................................................
2ème Année L. A Génie Electrique Page 87
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
DS Novembre 2018
Régulation de Niveau
Un système de régulation de niveau d’eau est modélisé par le schéma fonctionnel donné par la figure 1.
Régulateur Vanne Bac
Consigne Niveau d’eau
C(p) ɛ(p) Q1(p) H(p)
+ R(p) A(p) B(p)
-
I(p)
T(p)
Transmetteur
Figure 1 : Dispositif de régulation de niveau d’eau
Avec C(p) : Consigne, Q1(p) : Débit d’eau, H(p) : Niveau d’eau, I(p) : Sortie du transmetteur.
La Figure 2 : Représente le modèle de comportement de cette régulation de niveau : VM
VA
Q1 Q2
A
Q3
Q4
VE Pompe
Figure 2 : Modèle de comportement de régulation de niveau
Le débit d’entrée Q1 (fig 2) dépond de la section de la vanne automatique (VA), commandée par
l’actionneur (A).
(VM) est une vanne manuelle assurant le débit (Q2).
Le débit de sortie (Q3) est proportionnel à la hauteur (h) et la section de la vanne d’évacuation (VE).
La pompe (P) extrait un débit (Q4) proportionnel à la vitesse de rotation.
Les paramètres a et b du schéma fonctionnel du Bac (fig 3) sont choisis pour un point de fonctionnement
tels que : a=2 et b=500.
MG = − 20. log( G( j.osc ) ) ; Mφ = π + Arg(G(j ꙍ1))
𝒕𝒂𝒏𝒈(𝑨)+𝒕𝒂𝒏𝒈(𝑩)
NB : 𝒕𝒂𝒏𝒈(𝑨 + 𝑩) = 𝟏− 𝒕𝒂𝒏𝒈(𝑨).𝒕𝒂𝒏𝒈(𝑩) ;
2ème Année L. A Génie Electrique Page 88
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
𝟏
Les fonctions de transfert de l’actionneur et du transmetteur sont définies par : 𝑨(𝒑) = 𝑻(𝒑) = (𝟏+𝒑)
Q2(p) Q4(p)
+ -
Q1(p) 𝟏 1 H(p)
+ 𝑝
𝒃
-
Q3(p)
a
Figure 3 : schéma fonctionnel du Bac
PARTIE 1: Stabilité par Critère de Routh (10 pts)
Question 1 : En se référant à la figure 3 et en considérant que Q2 = Q4 =0.
𝑯(𝒑)
Trouver la fonction de transfert du Bac : B(p) =
𝑸𝟏 (𝒑)
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Question 2 : En l’identifiant à un système de premier ordre, déterminer le gain statique KB et la constante de
temps τB du Bac pour le point de fonctionnement choisi.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Dans ce qui suit, on suppose que le régulateur est de type proportionnel : R(p) = α
𝑯(𝒑)
Question 3 :En se référant au schéma au de la figure 1, calculer la fonction de transfert N(p) = du
𝑪(𝒑)
système en boucle fermée (Q2 = Q4 =0).
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Question 4 : En utilisant le critère de Routh, étudier en fonction de α, la stabilité du système en boucle
fermée.
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Déduire le domaine de stabilité : α
2ème Année L. A Génie Electrique Page 89
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 2 : Stabilité par critère de revers (10pts) :
Pour des raisons de de simplification, le système étudié dans la partie 1 se ramène au schéma bloc suivant :
Z(p)
C(p) ɛ(p) + H(p)
+ R(p) + M(p)
-
𝟏
Avec : 𝑴(𝒑) = et Z(p) une entrée de perturbation
𝒑(𝟏+𝟐𝟎𝒑)(𝟏+𝟓𝒑)
On considère un régulateur proportionnel : R(p) = K et en supposant que z(t) = 0 ;
Question 5 : Ecrire les expressions du module MdB(ɷ) et de l’Argument 𝝋(ɷ) de M(jɷ) :
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
................................................................................
Question 6 : Calculer le gain critique Kc limite de la stabilité du système en boucle fermée.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
Question 7 : Calculer le gain K1 assurant une marge de gain MG1 = 12dB
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
2ème Année L. A Génie Electrique Page 90
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Question 8 : Si on désire une marge de phase Mφ = 45°, quelle valeur de gain K2 doit-on choisir ?
En déduire la marge de gain MG2 en (dB)
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
.Question 9 : On donne ci-dessous le tracé de Bode de la réponse harmonique du système en boucle ouverte
pour différentes valeurs de K.
Tracer puis déduire de ces courbes les grandeurs suivantes :
La marge de gain MG La marge de phase Mφ Conclure sur la
(en dB) (en degrés) stabilité du système
M1
M2
MC
2ème Année L. A Génie Electrique Page 91
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Examen Janvier 2019
Régulation de vitesse d’un moteur à courant continu
PARTIE 1 : Etude préliminaire : R L 2.5pts
i
Le moteur à courant continu est commandé en tension,
on s’intéresse à la vitesse du rotor dépendant ω ω
f
de la charge constituée d’un frottement fluide. u e
(NB : Le flux de la machine est fonction
J
du courant d’excitation ɸ = f(j)) Cm Cr
Question 1 : En se référant à la figure 1, compléter le tableau suivant : Figure 1 : MCC
Loi physique Transformé de Laplace Schéma bloc
Équation 𝑑𝑖
u = R i + L 𝑑𝑡 + e U(p) +
électrique
_
au stator E(p)
Force contre e = Kɸ ω E(p) = Kɸ Ω(p)
E(p)
électromotrice
Couple Cm = Kɸ i
I(p) Kɸ Cm(p)
électromagnétique
Équation 𝑑𝜔
Cm –Cr = J +fω +
𝑑𝑡
mécanique _
Cr(p)
Question 2 : Compléter alors le schéma fonctionnel :Cr(p) 2pts
U(p) + I(p) Cm(p) + Ω(p)
_
E(p)
2ème Année L. A Génie Electrique Page 92
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
On considère le système représenté par le schéma fonctionnel suivant avec k > 0 et τ > 0.
E(p) S(p)
1 1
𝑘(1 + )
+ 𝜏𝑝 (1 + 𝑝)(1 + 10𝑝)
-
PARTIE 2: Stabilité par Critère de Routh :
Question 3 :
𝑺(𝒑) 1.5pts
Calculer la fonction de transfert en boucle fermée H(p) =
𝑬(𝒑)
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
……………………………… 2pts
Question 4 : Etudier la stabilité en utilisant le critère de Routh,
puis hachurer la zone de stabilité dans l’hyperplan τ =f(k) (Sur DR page 4/6)
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
………………………………………………………………………………
2ème Année L. A Génie Electrique Page 93
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 3: Rapidité par Critère de Naslin : 2pts
Question 4 : A l’aide de critère de Naslin, calculer les rapports caractéristiques αi :
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
………………………………………
Question 5 : Pour un dépassement D% ≤ 6% et sans prise en compte du numérateur N(p),
Hachurer dans l’hyperplan τ = f(k) la zone ou le D% ≤ 6%.(sur DR page 4/6)
…………………………………………………………………………………………………………………
2pts
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
…………………………………………………………………………………………………………………
Question 6 : Calculer le temps de pic Tp pour k = 1 et τ = 5.5s, 0.5pts
…………………………………………………………………………………………………………………
2ème Année L. A Génie Electrique Page 94
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Document Réponse DR
τ =f(k)
1
k
1
2ème Année L. A Génie Electrique Page 95
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
Question 7: On vous donne ci-dessous (figure 2) les réponses indicielles pour k = 1 et τ = 5.5s :
F(p) Sans correction
H(p) Avec correction
3.5pts
Figure 2 : les réponses indicielles pour k = 1 et τ = 5.5s
Déterminer graphiquement : Tp , Tm , Ts , D% , gains statiques en BF kf , en BO ko et
l’erreur statique de position ɛp.
Sans correction : F(p) Avec correction : H(p)
Dépassement D%
Temps de pic Tp(s)
Temps de monté Tm(s)
Temps de réponse à ±5% Tr (s)
Gain statique en boucle fermé kF
Gain statique en boucle ouvert kO
Erreur statique de position ɛp en %
2ème Année L. A Génie Electrique Page 96
Facicule de Cours TD, DS et Examens corrigés ISET Nabeul
Systèmes Asservis Linéaires Continus Département GE
PARTIE 4: Abaque de Black:
Question8 : On donne ci-joint le tracé sur un abaque de Black de la réponse harmonique des
systèmes G(p) et T(p) = R(p).G(p) en boucle ouverte pour K= 1 et τ = 5.5s.
4pts
Figure 3 : Réponses harmoniques des systèmes G(p) et T(p) pour K= 1 et τ = 5.5s.
Déduire de ces courbes (figure 3) les grandeurs relatives à un asservissement par retour
unitaire du système.
G(p) : T(p)=R(p).G(p) :
Sans correction Avec correction
Ordre du système (n)
Classe du système (α)
Le gain statique en BF (kF)
Le gain statique en BO (kO)
La marge de gain MG (en dB)
La marge de phase Mφ (en degrés)
Le pic de résonnance MP(en dB)
L’erreur statique de position (en % )
2ème Année L. A Génie Electrique Page 97
Vous aimerez peut-être aussi
- h5 TC Maintenance Coursv2 Coursv2 1783Document180 pagesh5 TC Maintenance Coursv2 Coursv2 1783stevin_doc100% (1)
- TD Corriges Asservissement Et RegulationDocument61 pagesTD Corriges Asservissement Et RegulationLamine Mossadak88% (41)
- Handbook SKFDocument452 pagesHandbook SKFschumiizz2bestPas encore d'évaluation
- TD3 Régulation-Asservissement Oct2019Document7 pagesTD3 Régulation-Asservissement Oct2019TECHNOLOGIES MODERNES DU CAMEROUN50% (2)
- EntreprisesDocument49 pagesEntreprisesKais Rihani83% (6)
- TP AsservissementDocument17 pagesTP Asservissementhaythem mokdedPas encore d'évaluation
- Corriges TD Ds ExamensDocument64 pagesCorriges TD Ds ExamensASSIA CHAITTIPas encore d'évaluation
- Systèmes Du Second OrdreDocument6 pagesSystèmes Du Second Ordretrawri007Pas encore d'évaluation
- Exercices Regulation HEI42TCDocument60 pagesExercices Regulation HEI42TCMohamed Ben Fredj79% (14)
- Travaux Dirigés Régulation Ind. 19Document53 pagesTravaux Dirigés Régulation Ind. 19Mer Oua100% (2)
- Le Controle QualitéDocument27 pagesLe Controle QualitéYassine El Ouadi100% (1)
- TD Automatique INSADocument7 pagesTD Automatique INSASalah Eddine EL AbbadiPas encore d'évaluation
- Représentation D'état Des SystèmesDocument2 pagesReprésentation D'état Des SystèmesQudýmãt Áhmèd100% (1)
- Analyse Des Circuits Pneumatiquess Et Electropneumatiques 1Document70 pagesAnalyse Des Circuits Pneumatiquess Et Electropneumatiques 1Koukou AmkoukouPas encore d'évaluation
- TD Automatique 1A 2016 JMDDocument20 pagesTD Automatique 1A 2016 JMDFaïssolath Achirou100% (1)
- TP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5Document17 pagesTP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5moha100% (1)
- Espace Etat CommandeDocument35 pagesEspace Etat CommandeSeddik MehenniPas encore d'évaluation
- Examen D'automatique PDFDocument2 pagesExamen D'automatique PDFAchraf Ramouch0% (1)
- TD N°1 Solution Introduction À La Régulation Industrielle.Document10 pagesTD N°1 Solution Introduction À La Régulation Industrielle.Mãl ÎkPas encore d'évaluation
- Travaux Pratiques AutomatiqueDocument14 pagesTravaux Pratiques AutomatiquemidoPas encore d'évaluation
- Exercices Automatique 2016Document19 pagesExercices Automatique 2016AbdElKrim100% (3)
- 2020 - 2021 - Examen Représentation D'état - V - 05-06-2021Document2 pages2020 - 2021 - Examen Représentation D'état - V - 05-06-2021KooraNow HD67% (3)
- TP Automatique MATLABDocument27 pagesTP Automatique MATLABZhor Ezzaam75% (8)
- TD 7 (Ex & Sol)Document8 pagesTD 7 (Ex & Sol)aymen sayoudPas encore d'évaluation
- TD 1 Régulation Industrielle 2017-BFDocument17 pagesTD 1 Régulation Industrielle 2017-BFamine milano100% (1)
- TD 4 (Ex & Sol)Document18 pagesTD 4 (Ex & Sol)aymen sayoud50% (2)
- T.D. Automatique N 1 - Corrige PDFDocument7 pagesT.D. Automatique N 1 - Corrige PDFYassine BridiPas encore d'évaluation
- 01-Lecon1 Analyse Fonctionnelle 2012-13Document8 pages01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- T4305 PDFDocument13 pagesT4305 PDFchahiPas encore d'évaluation
- T4305 PDFDocument13 pagesT4305 PDFchahiPas encore d'évaluation
- TD05 CorrectionDocument8 pagesTD05 CorrectionAltRoXPas encore d'évaluation
- TD 1 Solution Régulation industrielle-2017-BFDocument27 pagesTD 1 Solution Régulation industrielle-2017-BFamine milano100% (2)
- Td2 - Commandabilité Et Observabilité - EtudiantDocument3 pagesTd2 - Commandabilité Et Observabilité - Etudiantاحمد AHMED بوحوتةBOUHOUTA100% (1)
- PVDocument14 pagesPVSafae Sabir100% (1)
- TP Informatique IndustrielleDocument39 pagesTP Informatique IndustrielleWejdène GuedriPas encore d'évaluation
- Série de TD: Synthèse Des Systèmes Asservis Linéaires Continus: Correction Des SALCDocument7 pagesSérie de TD: Synthèse Des Systèmes Asservis Linéaires Continus: Correction Des SALCHajar Touil100% (1)
- Ziegler NicholsDocument4 pagesZiegler NicholsMounaim MatiniPas encore d'évaluation
- Compte Rendu Sys Asservis PDFDocument21 pagesCompte Rendu Sys Asservis PDFKhalîl Ðkhílí100% (1)
- RapportDocument28 pagesRapportrajid oumaimaPas encore d'évaluation
- Cours MMC VF UcaoDocument133 pagesCours MMC VF UcaonarcissePas encore d'évaluation
- Pid-Legend Sysboles PDFDocument1 pagePid-Legend Sysboles PDFAnnakimPas encore d'évaluation
- 9 Fiches de TD Asservissements Avec SolutionsDocument112 pages9 Fiches de TD Asservissements Avec Solutionsاحمد AHMED بوحوتةBOUHOUTA0% (1)
- TD4 AsservissementDocument2 pagesTD4 Asservissementred100% (2)
- TD Automatique GMII 20correction09JUINdDocument14 pagesTD Automatique GMII 20correction09JUINdproto niomPas encore d'évaluation
- TP 2 Correction Par PI PIDDocument5 pagesTP 2 Correction Par PI PIDKARKAR NORA100% (1)
- TP Retour D'étatDocument3 pagesTP Retour D'étatDamon Salvatore73% (11)
- Contrôle Automatique CorrigéDocument7 pagesContrôle Automatique CorrigéZakaria BendibPas encore d'évaluation
- TD1 (Ex & Sol)Document18 pagesTD1 (Ex & Sol)Younes Raache75% (4)
- QCM N - 7 AsservissementDocument21 pagesQCM N - 7 AsservissementAmiiRa100% (1)
- TD1 Logique FloueDocument8 pagesTD1 Logique FloueBrahim Gasbaoui100% (1)
- Série Rég GM - GIDocument5 pagesSérie Rég GM - GINisrine DaoukiPas encore d'évaluation
- TD - LFDocument9 pagesTD - LFNour z100% (1)
- TP3 Systemes Premier OrdreDocument5 pagesTP3 Systemes Premier Ordreisl dz100% (1)
- Licence ELT-2017-TD Régulation-BF-finalDocument30 pagesLicence ELT-2017-TD Régulation-BF-finalamine milanoPas encore d'évaluation
- Compte Rendu TP 1 CAODocument8 pagesCompte Rendu TP 1 CAOOussama EttahiriPas encore d'évaluation
- TD Technique de La CommandeDocument22 pagesTD Technique de La Commandeاحمد AHMED بوحوتةBOUHOUTAPas encore d'évaluation
- Série Dexercice - Chapitre 3Document4 pagesSérie Dexercice - Chapitre 3kima lachgar100% (1)
- CH4 Schéma Bloc Schéma Fonctionnel PDFDocument16 pagesCH4 Schéma Bloc Schéma Fonctionnel PDFWael Fadhloune100% (9)
- FONCTION DE TRANSFERT - CopieDocument10 pagesFONCTION DE TRANSFERT - CopiePhenix PhenixPas encore d'évaluation
- Etude Du Système Du Second Ordre: Exercice 1Document2 pagesEtude Du Système Du Second Ordre: Exercice 1sarah wiwiPas encore d'évaluation
- TP Asservissement Simulation Avec Matlab Système DynamiqueDocument10 pagesTP Asservissement Simulation Avec Matlab Système DynamiqueChaima ChPas encore d'évaluation
- TD 9 Ex SolDocument17 pagesTD 9 Ex Soljojo MomoPas encore d'évaluation
- Correction EMD1 RégulationDocument3 pagesCorrection EMD1 RégulationabdouPas encore d'évaluation
- EVANSDocument1 pageEVANSHoussineElGhazouaniPas encore d'évaluation
- Series Fourier Cours Exercices Corrigés 01Document58 pagesSeries Fourier Cours Exercices Corrigés 01RIYAD MOUBARIKPas encore d'évaluation
- Université: A M O B 2016-2017 Département: Licence: GB, 5Document9 pagesUniversité: A M O B 2016-2017 Département: Licence: GB, 5Juste dALMEIDAPas encore d'évaluation
- Devoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueDocument8 pagesDevoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueKhmira WafaPas encore d'évaluation
- Chapitre 1 Performances Des Systemes Asservis LineaireDocument10 pagesChapitre 1 Performances Des Systemes Asservis LineaireMed Raslene AlouiPas encore d'évaluation
- Série N°2 - 2023Document3 pagesSérie N°2 - 2023SOUHAIL CHEIKHPas encore d'évaluation
- Sii en Psi Correction Des SaDocument33 pagesSii en Psi Correction Des SaTal ElPas encore d'évaluation
- Epreuve + Corrigé-Type - Devoir Surveillé Automatique-Asservissements - GE2 - Juin 2023 - Tous CentresDocument18 pagesEpreuve + Corrigé-Type - Devoir Surveillé Automatique-Asservissements - GE2 - Juin 2023 - Tous CentresGael ODJOPas encore d'évaluation
- f (t) e f (t) t ω f (t) f (t) f (t) f (t) A t T ailleurs f (t) f (t) e ut f (t) t f (t) f (t) e t t ω ω ϕ f (t) te t δ f (t) ut t δDocument2 pagesf (t) e f (t) t ω f (t) f (t) f (t) f (t) A t T ailleurs f (t) f (t) e ut f (t) t f (t) f (t) e t t ω ω ϕ f (t) te t δ f (t) ut t δfazfrito lacaviataPas encore d'évaluation
- Résistance Au Déversement Des Poutres Métalliques de PontDocument190 pagesRésistance Au Déversement Des Poutres Métalliques de PontAhmed FrikhaPas encore d'évaluation
- Exam RDM Janv 2016 CompletDocument6 pagesExam RDM Janv 2016 Complethaythem mokdedPas encore d'évaluation
- Complements Graphiques PDFDocument5 pagesComplements Graphiques PDFABDELHAKIMPas encore d'évaluation
- Estimation Et TestDocument26 pagesEstimation Et Testhaythem mokdedPas encore d'évaluation
- Etude Et Amelioration de La ST - BELKHOU Jihane - 2654Document50 pagesEtude Et Amelioration de La ST - BELKHOU Jihane - 2654Ibtihel MechleouiPas encore d'évaluation
- Cahier de La Recherche Evaluation de La Competence Dans La Pratique de L Audit InterneDocument49 pagesCahier de La Recherche Evaluation de La Competence Dans La Pratique de L Audit InterneZaid SoufianePas encore d'évaluation
- Optimisation de La Decoloratio - EL BOUSGHY Mohcine 101Document184 pagesOptimisation de La Decoloratio - EL BOUSGHY Mohcine 101Lamyae BouachrinePas encore d'évaluation
- Pfe 2021Document9 pagesPfe 2021haythem mokdedPas encore d'évaluation
- ParetoDocument7 pagesParetoMohamed BoujnahPas encore d'évaluation
- Cahier de La Recherche Evaluation de La Competence Dans La Pratique de L Audit InterneDocument49 pagesCahier de La Recherche Evaluation de La Competence Dans La Pratique de L Audit InterneZaid SoufianePas encore d'évaluation
- MUDADocument145 pagesMUDAhaythem mokded0% (1)
- Rapport Aservissement Comande Numerique by NabilosDocument23 pagesRapport Aservissement Comande Numerique by Nabiloshaythem mokdedPas encore d'évaluation
- TP ScilabDocument8 pagesTP Scilabhaythem mokdedPas encore d'évaluation
- TP ScilabDocument8 pagesTP Scilabhaythem mokdedPas encore d'évaluation
- Cours D'automatique Illustré Avec Le Logiciel Scilab PDFDocument252 pagesCours D'automatique Illustré Avec Le Logiciel Scilab PDFhaythem mokdedPas encore d'évaluation
- Fadcicule6 PDFDocument10 pagesFadcicule6 PDFBOUZ2010Pas encore d'évaluation
- Exemple de Retro Calcul Sur CarriereDocument87 pagesExemple de Retro Calcul Sur CarriereGhislain CordierPas encore d'évaluation
- Exos Sur Lelectrolyse Du NaClDocument3 pagesExos Sur Lelectrolyse Du NaClNB100% (1)
- Systèmes D'équations LinéairesDocument4 pagesSystèmes D'équations LinéairesWhatgreenPas encore d'évaluation
- AIRSUN - Brise Soleil Fixe Ou Mobile en Alu-4Document2 pagesAIRSUN - Brise Soleil Fixe Ou Mobile en Alu-4Bcd CdePas encore d'évaluation
- TP KhodjaDocument13 pagesTP KhodjafaroukPas encore d'évaluation
- Mechanical-Properties-Cours (Presentation)Document28 pagesMechanical-Properties-Cours (Presentation)amir11sahli11Pas encore d'évaluation
- Exercice 1 (Points)Document2 pagesExercice 1 (Points)belhadi.kPas encore d'évaluation
- Exercice Topométries 2Document4 pagesExercice Topométries 2Djamiou Bahogbo100% (1)
- La Couche Liaison de DonnéesDocument21 pagesLa Couche Liaison de DonnéesLeila KararPas encore d'évaluation
- Programme Secondaire RemanieeDocument16 pagesProgramme Secondaire Remanieedesrosesjeanrene6Pas encore d'évaluation
- Ziti Salah EddineDocument4 pagesZiti Salah EddineSalah-eddine ZitiPas encore d'évaluation
- Cours Physiovégétale2Document23 pagesCours Physiovégétale2Rachid AIT ELAYADPas encore d'évaluation
- TP MatlabDocument13 pagesTP MatlabNoOr HanePas encore d'évaluation
- Texte Argumentatif PADDocument14 pagesTexte Argumentatif PADEdward Alexander RojasPas encore d'évaluation
- TP Algorithme AvancéDocument2 pagesTP Algorithme AvancéAdham NuiakhPas encore d'évaluation
- TP MDFDocument11 pagesTP MDFMusta Bhmd100% (2)
- Cours3 MIAGEDocument5 pagesCours3 MIAGEalilounahdiste100% (1)
- Compte Rendu de Travaux Pratiques de Chimie de L-1Document18 pagesCompte Rendu de Travaux Pratiques de Chimie de L-1Hajar ouajidPas encore d'évaluation
- TD Modulation AM N1Document6 pagesTD Modulation AM N1DAP creatPas encore d'évaluation
- ButeeDocument3 pagesButeePAUSE RACE100% (1)
- Sujets MASAFEQ 2019 V 1 3 Oct24Document18 pagesSujets MASAFEQ 2019 V 1 3 Oct24smailPas encore d'évaluation
- Principe de PeterDocument6 pagesPrincipe de Peternradhy2725Pas encore d'évaluation
- INTRODUCTIONDocument29 pagesINTRODUCTIONsalahouchenesalahPas encore d'évaluation
- Complex Book FinalDocument118 pagesComplex Book Finalsawahkouba1Pas encore d'évaluation