Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- TN06 PDFDocument34 pagesTN06 PDFMa HdiPas encore d'évaluation
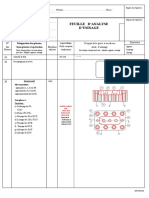
- Feuille Analyse Gamme UsinageDocument2 pagesFeuille Analyse Gamme UsinageBouhdida MohamedPas encore d'évaluation
- Document 2Document45 pagesDocument 2Farouk DrissiPas encore d'évaluation
- 3 Gu BC PDFDocument2 pages3 Gu BC PDFtagne simo rodriguePas encore d'évaluation
- (TDP) (CO) Transmission de Puissance PDFDocument16 pages(TDP) (CO) Transmission de Puissance PDFabdelhalimPas encore d'évaluation
- m21 Mathematiques Et Mecanique AppliqueeDocument64 pagesm21 Mathematiques Et Mecanique AppliqueeSteve Gate100% (1)
- Répertoire Des ModulesdigitalisésDocument87 pagesRépertoire Des ModulesdigitalisésHamza ChaloutPas encore d'évaluation
- GM 2Document39 pagesGM 2Youcef MimouniPas encore d'évaluation
- 3 GU (2) Copier DéverrouilléDocument1 page3 GU (2) Copier DéverrouilléMAJDA TAHIRIPas encore d'évaluation
- B0014I9CSIDocument9 pagesB0014I9CSIMak AdPas encore d'évaluation
- Exercice 3Document3 pagesExercice 3Ahmed DjebbiPas encore d'évaluation
- Train ÉpicycloïdalDocument7 pagesTrain ÉpicycloïdalTEBAO PRINCEPas encore d'évaluation
- Devoire de Synthése N°1 - Technique - 1ére Année Secondaire (2019 - 2020) Lycée El Khadra36 - MR Soudani SamiDocument5 pagesDevoire de Synthése N°1 - Technique - 1ére Année Secondaire (2019 - 2020) Lycée El Khadra36 - MR Soudani SamiZaineb LaouiniPas encore d'évaluation
- Serre Joint Dessin D'ensembleDocument1 pageSerre Joint Dessin D'ensembleAbdeslam Elmrabet100% (1)
- GE TSMFM Version Du 19-04-2004Document102 pagesGE TSMFM Version Du 19-04-2004Bouallegue MounirPas encore d'évaluation
- Le Contrôle GéométriqueDocument7 pagesLe Contrôle GéométriqueNS ADPas encore d'évaluation
- Cours Ajustements eDocument4 pagesCours Ajustements ebakhchouch100% (1)
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDocument98 pagesPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BottePas encore d'évaluation
- TD1-Dispositif de SerrageDocument6 pagesTD1-Dispositif de SerrageAlbertø Là VïtëssëPas encore d'évaluation
- Mac Commande de SoupapesDocument1 pageMac Commande de SoupapesKouki NizarPas encore d'évaluation
- 2 Principe de ProgrammationDocument3 pages2 Principe de ProgrammationMido Si CherniPas encore d'évaluation
- TD FaoDocument3 pagesTD FaoAmer ChaffaiPas encore d'évaluation
- Copie FinaleDocument120 pagesCopie Finalezehii ghofranPas encore d'évaluation
- M9 - Conception Et Dessin D'outillage de Production Version 2Document119 pagesM9 - Conception Et Dessin D'outillage de Production Version 2Taha ZianePas encore d'évaluation
- Exercice 4Document2 pagesExercice 4Ahmed DjebbiPas encore d'évaluation
- Dm4 Si Etude TransporteurDocument4 pagesDm4 Si Etude TransporteurM'hamed Rian100% (1)
- Les Opérations D'usinageDocument5 pagesLes Opérations D'usinageSaad JebbariPas encore d'évaluation
- 14 Programmation Des Mocn DVDocument74 pages14 Programmation Des Mocn DVlcom freePas encore d'évaluation
- rabenambininaChanW ENS CPN 08Document97 pagesrabenambininaChanW ENS CPN 081ere année ingPas encore d'évaluation
- Conception Des Outillages 1p 2009 CaoDocument14 pagesConception Des Outillages 1p 2009 CaoABDELHADI MIHFADPas encore d'évaluation
- Série D'exercices N°4 - Technologie - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°4 - Technologie - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanGhayth Bouzayani100% (1)
- 6-Contrat de Phase #30-FourreauDocument1 page6-Contrat de Phase #30-Fourreauali charlok100% (1)
- VE Reglable TD PDFDocument4 pagesVE Reglable TD PDFMohammed BouchelarmPas encore d'évaluation
- 2 Exercice Corrigé Dessin Technique NormesDocument2 pages2 Exercice Corrigé Dessin Technique NormesAly GAMALEDDYNPas encore d'évaluation
- HCH-FAB II - Partie 1Document8 pagesHCH-FAB II - Partie 1lachhelPas encore d'évaluation
- Poulies Et Courroies de Transmission. Données Numériques. (O)Document23 pagesPoulies Et Courroies de Transmission. Données Numériques. (O)DiesePas encore d'évaluation
- Manuel TourneurDocument141 pagesManuel TourneurAG HAMPas encore d'évaluation
- Unite Transmettre 1 STE Partie 1 PDFDocument68 pagesUnite Transmettre 1 STE Partie 1 PDFyassine22Pas encore d'évaluation
- 1-Gamme DusinageDocument1 page1-Gamme Dusinagetagne simo rodrigue100% (1)
- PMOCN Doc ÉleveDocument16 pagesPMOCN Doc Élevedayzen jiffPas encore d'évaluation
- Construction MécaniqueDocument463 pagesConstruction MécaniqueFatiha BamaâroufPas encore d'évaluation
- TOM TraçageDocument2 pagesTOM TraçageAina RATSIMBAZAFYPas encore d'évaluation
- (Brevet ProfessionnelDocument256 pages(Brevet ProfessionnelEFFAPas encore d'évaluation
- Roue de FrictionDocument4 pagesRoue de Frictionuriel marcel nzambaPas encore d'évaluation
- Fascicule Dessin Et Technologie 3 Année-1Document194 pagesFascicule Dessin Et Technologie 3 Année-1noubanPas encore d'évaluation
- M09 Coursgeniemecanique Conception Et Dessin D Outillages de Production Version 2-FM-TSMFMDocument116 pagesM09 Coursgeniemecanique Conception Et Dessin D Outillages de Production Version 2-FM-TSMFMMohamed Sahil100% (2)
- 2STM Eleve T1 PDFDocument59 pages2STM Eleve T1 PDFHanane TounsiPas encore d'évaluation
- TD5 Vocabulaire Dzierla CédricDocument4 pagesTD5 Vocabulaire Dzierla CédricCédric DziePas encore d'évaluation
- 3-Cotation FonctionnelleDocument4 pages3-Cotation FonctionnelleChaima ARIBPas encore d'évaluation
- Technologie - Matériaux - Généralités - Désignation Normalisée Des Aciers - WikilivresDocument17 pagesTechnologie - Matériaux - Généralités - Désignation Normalisée Des Aciers - WikilivresBakary CoulibalyPas encore d'évaluation
- Bac STI GMDocument2 pagesBac STI GMArnaud HarbonnierPas encore d'évaluation
- Memoire AbdelkhalekDocument148 pagesMemoire AbdelkhalekSupradayaLight0% (1)
- DessinDocument21 pagesDessinPast NdayishimiyePas encore d'évaluation
- Bureau Des MethodesDocument9 pagesBureau Des MethodesChahinez MoatesPas encore d'évaluation
- Dessin de Définition de Corps 2Document1 pageDessin de Définition de Corps 2Mohsen LaabidiPas encore d'évaluation
- Fabrication Des Pieces Simple en TournageDocument73 pagesFabrication Des Pieces Simple en Tournagesarre mamoudouPas encore d'évaluation
- Eliraoui KarimDocument33 pagesEliraoui KarimLahnine Ismail100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Ing Mec Mini ProjDocument9 pagesIng Mec Mini ProjMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- F2023049Document24 pagesF2023049MOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Attestation de DonDocument1 pageAttestation de DonMOHAMED CHERIF KHATRAOUI100% (1)
- A Retenir - MA - PartieA PDFDocument2 pagesA Retenir - MA - PartieA PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- A Retenir - MA - PartieA PDFDocument2 pagesA Retenir - MA - PartieA PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- A Retenir - MA - PartieB PDFDocument2 pagesA Retenir - MA - PartieB PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- A Retenir - MA - PartieB PDFDocument2 pagesA Retenir - MA - PartieB PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- AssemblageDocument21 pagesAssemblageMOHAMED CHERIF KHATRAOUI100% (4)
- Transmissions GénéralitésDocument24 pagesTransmissions GénéralitésMOHAMED CHERIF KHATRAOUI100% (1)
- Réducteur Éssuis-GlacesDocument12 pagesRéducteur Éssuis-GlacesMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- DenturesDocument14 pagesDenturesMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- PrésentationDocument17 pagesPrésentationMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Diaporama RLTDocument19 pagesDiaporama RLTMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- 1013Document12 pages1013Salah Eddine ChouikhPas encore d'évaluation
- Cours AjustementsDocument6 pagesCours Ajustementsabder2222Pas encore d'évaluation
- Calcul Roulement PDFDocument50 pagesCalcul Roulement PDFcisse100% (1)
- Adherence FrottementDocument1 pageAdherence FrottementMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- FeuilletageDocument16 pagesFeuilletageMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Palier Carter AutoporteeDocument4 pagesPalier Carter AutoporteeMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Chapitre 2liaison CompleteDocument8 pagesChapitre 2liaison CompleteYouness El HamriPas encore d'évaluation
- Automobile - Boite de Vitesses Mécanique - FR 10 PGDocument10 pagesAutomobile - Boite de Vitesses Mécanique - FR 10 PGGuy FranklinPas encore d'évaluation
- 1013Document12 pages1013Salah Eddine ChouikhPas encore d'évaluation
- Réducteur de VitesseDocument38 pagesRéducteur de VitesseMOHAMED CHERIF KHATRAOUI100% (1)
- 2100544632 (1)Document292 pages2100544632 (1)Saad Al HelyPas encore d'évaluation
- Cahier de Charge ChevalierDocument2 pagesCahier de Charge ChevalierMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Chapitre 3 - Centrales Thermiques À Gaz ExoDocument5 pagesChapitre 3 - Centrales Thermiques À Gaz Exostudent7Pas encore d'évaluation
- TD CHIMIE 02 Série 05 Par HOCINE TayebDocument8 pagesTD CHIMIE 02 Série 05 Par HOCINE TayebRania MeRzouguiPas encore d'évaluation
- M1 - TD1 Corrweb - 1415Document5 pagesM1 - TD1 Corrweb - 1415Simo SiHadPas encore d'évaluation
- Examen Capteurs 2020Document3 pagesExamen Capteurs 2020Thierry IlboudoPas encore d'évaluation
- 1ère S Cours Équations Et Inéquations Trigonométriques-1Document7 pages1ère S Cours Équations Et Inéquations Trigonométriques-1Barth100% (1)
- 2012 Bahrani 29921Document236 pages2012 Bahrani 29921Oussama ChahirPas encore d'évaluation
- Optimisation de La Cristallisa - HASSANI ALAOUI Abdelaziz - 1994Document62 pagesOptimisation de La Cristallisa - HASSANI ALAOUI Abdelaziz - 1994davidhooperPas encore d'évaluation
- Correction Ts. dm2.10Document2 pagesCorrection Ts. dm2.10Jules Arthur Noutcha MbouchePas encore d'évaluation
- Stross, Charles Palimpseste (Palimpsest) (2009)Document103 pagesStross, Charles Palimpseste (Palimpsest) (2009)Alberto Con LeguiPas encore d'évaluation
- Liaison Poteau-MomentDocument4 pagesLiaison Poteau-Momentyazide zahoPas encore d'évaluation
- Stats Seance 03 DocDocument16 pagesStats Seance 03 DocJean-Baptiste GAUTIER-FABIANIPas encore d'évaluation
- 4-Techniques de Caractérisation Des CatalyseursDocument66 pages4-Techniques de Caractérisation Des CatalyseursFATIHA EL FARGANYPas encore d'évaluation
- Serie Statistique Licence MI SDDocument30 pagesSerie Statistique Licence MI SDmounamounamounaPas encore d'évaluation
- Les Quasi-CristauxDocument43 pagesLes Quasi-CristauxwafaPas encore d'évaluation
- Cours AlternateurDocument10 pagesCours Alternateurjeremy54000100% (2)
- CHEM - TD 3.1 - Pont Mixte Isostatique - Sujet - VADocument22 pagesCHEM - TD 3.1 - Pont Mixte Isostatique - Sujet - VAMario100% (2)
- Lexique FacadesDocument83 pagesLexique FacadeslecaudeydidierPas encore d'évaluation
- EI - M04 - Traçage de Croquis Et de Schémas Électriques - (WWW - Diploma.ma)Document73 pagesEI - M04 - Traçage de Croquis Et de Schémas Électriques - (WWW - Diploma.ma)Mariem BaihichPas encore d'évaluation
- Calcule Hydraulique SP-R1Document3 pagesCalcule Hydraulique SP-R1Cheikh Bekar AbdiPas encore d'évaluation
- Tube Cuivre 2Document8 pagesTube Cuivre 2moussaPas encore d'évaluation
- Applications Duales Des Actionneurs Piezoelectriques AmplifiesDocument3 pagesApplications Duales Des Actionneurs Piezoelectriques AmplifiesadrarwalidPas encore d'évaluation
- Formation Et Habilitation2Document18 pagesFormation Et Habilitation2Maho Laminy SakhoPas encore d'évaluation
- Brochure CND FRDocument2 pagesBrochure CND FRIbrahim Nanguin COULIBALYPas encore d'évaluation
- Generalites FonctionDocument6 pagesGeneralites FonctionCamara layePas encore d'évaluation
- Corrige Brevet Centres Etrangers 14-06-2022 FH 2Document7 pagesCorrige Brevet Centres Etrangers 14-06-2022 FH 2Abdoul aziz AssoumanePas encore d'évaluation
- 21 Matj1me2Document7 pages21 Matj1me2LETUDIANT100% (2)
- Afc Beamer 2020Document33 pagesAfc Beamer 2020Ferdaws ZiadiaPas encore d'évaluation
- La Classification Ascendante Hiérarchique: Objectifs: Classer Des Individus Ayant Un Comportement Similaire Sur UnDocument10 pagesLa Classification Ascendante Hiérarchique: Objectifs: Classer Des Individus Ayant Un Comportement Similaire Sur Unamine HouafPas encore d'évaluation
- Rapport VFDocument33 pagesRapport VFhfdsalePas encore d'évaluation
- Noeuds 1Document20 pagesNoeuds 1nmezianePas encore d'évaluation