Vous aimerez peut-être aussi
- Hybrid PWM Strategy of SVPWM and VSVPWM For NPC Three-Level Voltage-Source InverterDocument13 pagesHybrid PWM Strategy of SVPWM and VSVPWM For NPC Three-Level Voltage-Source InverterANKIT PRAJAPATIPas encore d'évaluation
- SVPWM PDFDocument5 pagesSVPWM PDFmauricetappaPas encore d'évaluation
- PEMD2014 0282 FinalDocument6 pagesPEMD2014 0282 FinalSherif M. DabourPas encore d'évaluation
- Comparative Study of Five Level and SeveDocument12 pagesComparative Study of Five Level and Sevemahmoud yarahmadiPas encore d'évaluation
- 4.1) Artigo - RSPWM - FerrazDocument8 pages4.1) Artigo - RSPWM - FerrazAndréPas encore d'évaluation
- Permanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMDocument8 pagesPermanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMQamilPas encore d'évaluation
- SVM Algorithm of Three-Level NPC Inverter: Shanmei Cheng and Yajun Liu Bing WuDocument5 pagesSVM Algorithm of Three-Level NPC Inverter: Shanmei Cheng and Yajun Liu Bing WumücahitPas encore d'évaluation
- SPWM SVPWMDocument44 pagesSPWM SVPWMAravind MohanaveeramaniPas encore d'évaluation
- MPC Controller of PV System Based Three-Level NPC Inverter Under Different Climatic Conditions Connected To The GridDocument8 pagesMPC Controller of PV System Based Three-Level NPC Inverter Under Different Climatic Conditions Connected To The GridXuân Phú PhạmPas encore d'évaluation
- Harmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BDocument5 pagesHarmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BMYNAMEPas encore d'évaluation
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocument9 pagesA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)Pas encore d'évaluation
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocument12 pagesLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadPas encore d'évaluation
- Modeling and Simulation of A MMC-based Solid-State Transformer........ SpringerDocument13 pagesModeling and Simulation of A MMC-based Solid-State Transformer........ SpringerKaumil ShahPas encore d'évaluation
- 2004 A Carrier-Based PWM Method For Three-Phase Four-LegDocument10 pages2004 A Carrier-Based PWM Method For Three-Phase Four-LegTài Nguyễn Minh NhậtPas encore d'évaluation
- Evaluation of Current Ripple Amplitude in Three-Phase PWM Voltage Source InvertersDocument6 pagesEvaluation of Current Ripple Amplitude in Three-Phase PWM Voltage Source InvertersluanlePas encore d'évaluation
- A Control Scheme of Three Phase Solid State Transformer For PV Generation Based On Improved Voltage-Tracking Method of DC LinksDocument6 pagesA Control Scheme of Three Phase Solid State Transformer For PV Generation Based On Improved Voltage-Tracking Method of DC LinksCamila MurilloPas encore d'évaluation
- Ijret - Study of Sinusoidal and Space Vector Pulse Width Modulation Techniques For A Cascaded Three-Level InverterDocument6 pagesIjret - Study of Sinusoidal and Space Vector Pulse Width Modulation Techniques For A Cascaded Three-Level InverterInternational Journal of Research in Engineering and TechnologyPas encore d'évaluation
- Introducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesDocument6 pagesIntroducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesmaheshwareshwarPas encore d'évaluation
- Cad Lab ManualDocument15 pagesCad Lab ManualSougata Ghosh100% (2)
- Multistring Five-Level Inverter With Novel PWMDocument13 pagesMultistring Five-Level Inverter With Novel PWMsandeepbabu28Pas encore d'évaluation
- An SVM Algorithm To Balance The Capacitor Voltages of The Three-Level NPC APFDocument9 pagesAn SVM Algorithm To Balance The Capacitor Voltages of The Three-Level NPC APFTran Quoc HoanPas encore d'évaluation
- Comparison of Three SVPWM StrategiesDocument5 pagesComparison of Three SVPWM StrategiesNguyễn Đình VănPas encore d'évaluation
- Simulation and Comparison of SPWM and SVPWM Control For Two Level InverterDocument6 pagesSimulation and Comparison of SPWM and SVPWM Control For Two Level InverterIkram RidhoPas encore d'évaluation
- A Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineDocument6 pagesA Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineHieu VuPas encore d'évaluation
- Limits of The Neutral-Point Balance in Back-to-Back-Connected Three-Level ConvertersDocument10 pagesLimits of The Neutral-Point Balance in Back-to-Back-Connected Three-Level ConvertersGanesh PradhanPas encore d'évaluation
- A New Simplified Space-Vector PWM Method For Three-Level InvertersDocument6 pagesA New Simplified Space-Vector PWM Method For Three-Level InvertersVIJAYPUTRAPas encore d'évaluation
- A DC-link Voltage Balancing Algorithm For Three-Level Neutral Point Clamped (NPC) Traction Inverter Drive in Field Weakening RegionDocument6 pagesA DC-link Voltage Balancing Algorithm For Three-Level Neutral Point Clamped (NPC) Traction Inverter Drive in Field Weakening RegionmücahitPas encore d'évaluation
- Andrzej M. Trzynadlowski-Control of Induction Motors (Electrical and Electronic Engineering) (Engineering) (2000)Document6 pagesAndrzej M. Trzynadlowski-Control of Induction Motors (Electrical and Electronic Engineering) (Engineering) (2000)Ahmet GündoğduPas encore d'évaluation
- 06125602Document6 pages06125602Ahmad Sadam SyaeroziPas encore d'évaluation
- Space Vector Pulse Width Modulation-Libre PDFDocument6 pagesSpace Vector Pulse Width Modulation-Libre PDFlongPas encore d'évaluation
- PWM Boost Converter PDFDocument12 pagesPWM Boost Converter PDFAnonymous wSgOVLfn6BPas encore d'évaluation
- A Novel Offset Based PWMDocument13 pagesA Novel Offset Based PWMLindsay ClarkPas encore d'évaluation
- Modulação de InversoresDocument6 pagesModulação de InversoresjuliomilitaoPas encore d'évaluation
- 2018 A Fast Model Predictive Control With Fixed Switching Frequency Based On Virtual Space Vector For Three-Phase InvertersDocument7 pages2018 A Fast Model Predictive Control With Fixed Switching Frequency Based On Virtual Space Vector For Three-Phase Invertersdaiduongxanh14113Pas encore d'évaluation
- Extension State Space Averaging Resonant Switches and BeyondDocument8 pagesExtension State Space Averaging Resonant Switches and BeyondMC TimbuPas encore d'évaluation
- UPEC2006 Atif RevisedDocument6 pagesUPEC2006 Atif Revisedhyu2123Pas encore d'évaluation
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaPas encore d'évaluation
- ANN Switched Z-Source Inverter Based PV Generation System: AbstractDocument9 pagesANN Switched Z-Source Inverter Based PV Generation System: AbstractsathishPas encore d'évaluation
- A MPPT Algorithm For Single-Phase Single-Stage Photovoltaic ConvertersDocument6 pagesA MPPT Algorithm For Single-Phase Single-Stage Photovoltaic ConvertersJidhin JayanPas encore d'évaluation
- A Neural Network Based Space Vector PWM À LireDocument10 pagesA Neural Network Based Space Vector PWM À LiremaimouniahlamoPas encore d'évaluation
- FPGA Based Implementation of Symmetrical Switching in SVPWM For Three Level NPC ConverterDocument6 pagesFPGA Based Implementation of Symmetrical Switching in SVPWM For Three Level NPC ConvertersateeshPas encore d'évaluation
- Matlab-Simulink Model Three-Phase Voltage Source InverterDocument5 pagesMatlab-Simulink Model Three-Phase Voltage Source InverterDương Tấn TàiPas encore d'évaluation
- A Comparison of Multicarrier PWM Strategies For Cascaded and Neutral Point Clamped Multilevel InvertersDocument6 pagesA Comparison of Multicarrier PWM Strategies For Cascaded and Neutral Point Clamped Multilevel InvertersKanna Thanga RajPas encore d'évaluation
- Digitized Feedforward Compensation Method For High Power Density Three-Phase VIENNA PFC ConverterDocument6 pagesDigitized Feedforward Compensation Method For High Power Density Three-Phase VIENNA PFC Convertergerson gomesPas encore d'évaluation
- Harmonic and Loss Analysis of Space-Vector Modulated ConvertersDocument6 pagesHarmonic and Loss Analysis of Space-Vector Modulated Convertersahmet ozturkPas encore d'évaluation
- An Unified Neutral-Point Voltage Controller For NPC Converter Fed Induction Machine DriveDocument6 pagesAn Unified Neutral-Point Voltage Controller For NPC Converter Fed Induction Machine DrivesateeshPas encore d'évaluation
- Three-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveDocument6 pagesThree-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveKuntal SatpathiPas encore d'évaluation
- Generalized Discontinuous DC-link Balancing Modulation Strategy For Three-Level InvertersDocument8 pagesGeneralized Discontinuous DC-link Balancing Modulation Strategy For Three-Level Invertersmeistehaft270Pas encore d'évaluation
- A Novel Control Strategy of Indirect Matrix ConverDocument10 pagesA Novel Control Strategy of Indirect Matrix Convermạnh phanPas encore d'évaluation
- A Novel Space Vector Modulation Control Strategy For Three-Leg Four-WireDocument10 pagesA Novel Space Vector Modulation Control Strategy For Three-Leg Four-WireakankshiPas encore d'évaluation
- Space Vector PWM - 3Document6 pagesSpace Vector PWM - 3guanitouPas encore d'évaluation
- HVDC VSC 2L BenchmarkDocument7 pagesHVDC VSC 2L BenchmarkRavi VermaPas encore d'évaluation
- Saddle PWMDocument11 pagesSaddle PWMFazal AkbarPas encore d'évaluation
- 05586659Document11 pages05586659Sherif M. DabourPas encore d'évaluation
- Novel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InverterDocument6 pagesNovel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InvertermücahitPas encore d'évaluation
- Novel Control Strategy For Single-Phase Single-Stage Photovoltaic Converter Using MPPT AlgorithmDocument6 pagesNovel Control Strategy For Single-Phase Single-Stage Photovoltaic Converter Using MPPT Algorithmchandu_chowdary_2Pas encore d'évaluation
- Icit 2015 7125227Document6 pagesIcit 2015 7125227GosadorPas encore d'évaluation
- Durgasukumar 2011Document6 pagesDurgasukumar 2011aditya317crazyPas encore d'évaluation
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsD'EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsPas encore d'évaluation
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsD'EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsPas encore d'évaluation
- New Step-Up and Step-Down 18-Pulse Direct Asymmetric Autotransformer Rectifier UnitsDocument7 pagesNew Step-Up and Step-Down 18-Pulse Direct Asymmetric Autotransformer Rectifier UnitsMaikPortnoyPas encore d'évaluation
- Active Front-End Converter For Medium-Voltage Current-Source Drives Using Sequential-Sampling Synchronous Space-Vector ModulationDocument15 pagesActive Front-End Converter For Medium-Voltage Current-Source Drives Using Sequential-Sampling Synchronous Space-Vector ModulationMaikPortnoyPas encore d'évaluation
- SARS-CoV-2 - Air:aerosols and Surfaces in Laboratory and Clinical SettingsDocument3 pagesSARS-CoV-2 - Air:aerosols and Surfaces in Laboratory and Clinical SettingsMaikPortnoyPas encore d'évaluation
- Combining Active Learning and Semi-Supervised Learning To Construct SVM ClassifieDocument31 pagesCombining Active Learning and Semi-Supervised Learning To Construct SVM ClassifieMaikPortnoyPas encore d'évaluation
- Fast-Processing Modulation Strategy For The Neutral-Point-Clamped Converter With Total Elimination of The Low-Frequency Voltage Oscillations in The Neutral PointDocument6 pagesFast-Processing Modulation Strategy For The Neutral-Point-Clamped Converter With Total Elimination of The Low-Frequency Voltage Oscillations in The Neutral PointMaikPortnoyPas encore d'évaluation
- Double Synchronous Reference Frame PLL For Power Converters ControlDocument7 pagesDouble Synchronous Reference Frame PLL For Power Converters ControlMaikPortnoyPas encore d'évaluation
- Complex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersDocument15 pagesComplex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersMaikPortnoyPas encore d'évaluation
- Continuously Motor-Synchronized Ride-Through Capability For Matrix-Converter Adjustable-Speed DrivesDocument11 pagesContinuously Motor-Synchronized Ride-Through Capability For Matrix-Converter Adjustable-Speed DrivesMaikPortnoyPas encore d'évaluation
- Extended Voltage Swell Ride-Through Capability For PWM Voltage-Source RectifiersDocument13 pagesExtended Voltage Swell Ride-Through Capability For PWM Voltage-Source RectifiersMaikPortnoyPas encore d'évaluation
- Care For Life and Equipment: Dust Suppression For Bulk Transfer Points Made in GermanyDocument8 pagesCare For Life and Equipment: Dust Suppression For Bulk Transfer Points Made in GermanyMaikPortnoyPas encore d'évaluation
- Circuit World: Article InformationDocument10 pagesCircuit World: Article InformationMaikPortnoyPas encore d'évaluation
- Safety Analysis of Trailing CablesDocument28 pagesSafety Analysis of Trailing CablesMaikPortnoyPas encore d'évaluation
- Dust Control Martin Eng PDFDocument59 pagesDust Control Martin Eng PDFMaikPortnoy100% (2)
- Circuit World: Article InformationDocument10 pagesCircuit World: Article InformationMaikPortnoyPas encore d'évaluation
- MIT SDMDocument57 pagesMIT SDMMaikPortnoyPas encore d'évaluation
- Circuit World: Article InformationDocument10 pagesCircuit World: Article InformationMaikPortnoyPas encore d'évaluation
- Piezoelectric BL Bluetooth SensorDocument4 pagesPiezoelectric BL Bluetooth SensorMartín CastilloPas encore d'évaluation
- Certificado ANATEL Esp32Document2 pagesCertificado ANATEL Esp32christiansassoPas encore d'évaluation
- Voltage Amplification, Trail Cable Length & Power ShovelsDocument9 pagesVoltage Amplification, Trail Cable Length & Power ShovelsMaikPortnoyPas encore d'évaluation
- NIOSH Proximity Awareness EvaluationDocument94 pagesNIOSH Proximity Awareness EvaluationMaikPortnoyPas encore d'évaluation
- NIOSH Proximity Awarning Technology & ApproachesDocument54 pagesNIOSH Proximity Awarning Technology & ApproachesMaikPortnoyPas encore d'évaluation
- NIOSH Proximity Awarning Technology & ApproachesDocument54 pagesNIOSH Proximity Awarning Technology & ApproachesMaikPortnoyPas encore d'évaluation
- Shovel Payload Monitoring ThesisDocument128 pagesShovel Payload Monitoring ThesisMaikPortnoyPas encore d'évaluation
- Saminco Electric LHDDocument55 pagesSaminco Electric LHDMaikPortnoyPas encore d'évaluation
- Evaluation of Energy Storage System RequirementsDocument7 pagesEvaluation of Energy Storage System RequirementsMaikPortnoyPas encore d'évaluation
- Tom Olsen2Document35 pagesTom Olsen2MaikPortnoyPas encore d'évaluation
- SEEENAN Applicaiton Note Fiber Optic Leak Detection For Dams and DikesDocument2 pagesSEEENAN Applicaiton Note Fiber Optic Leak Detection For Dams and DikesMaikPortnoyPas encore d'évaluation
- 05619782Document8 pages05619782MaikPortnoyPas encore d'évaluation
- Franciosa L Hau DDocument44 pagesFranciosa L Hau DAnonymous HDEoIT6kTPas encore d'évaluation
- BF V CatalogDocument56 pagesBF V CatalogmaciasrobPas encore d'évaluation
- Problems Involving Sequences: Grade 10Document9 pagesProblems Involving Sequences: Grade 10Jhiemalyn RonquilloPas encore d'évaluation
- Classical Electromagnetism 1st Edition Franklin Solutions ManualDocument21 pagesClassical Electromagnetism 1st Edition Franklin Solutions ManualBrianYorktnqsw100% (15)
- SeptalkanDocument5 pagesSeptalkanReniPas encore d'évaluation
- Mindfulness For Two An Acceptance and Commitment TDocument5 pagesMindfulness For Two An Acceptance and Commitment TNilton SantosPas encore d'évaluation
- Brushless MotorsDocument20 pagesBrushless Motorsbwatkins6Pas encore d'évaluation
- Streets As Places - Un Habitat ReportDocument168 pagesStreets As Places - Un Habitat Reportrf88100% (7)
- Huawei FusionServer RH2288 V3 Data Sheet PDFDocument2 pagesHuawei FusionServer RH2288 V3 Data Sheet PDFMartenMattisenPas encore d'évaluation
- Bioinformatics Computing II: MotivationDocument7 pagesBioinformatics Computing II: MotivationTasmia SaleemPas encore d'évaluation
- Dubai Holding FactsheetDocument2 pagesDubai Holding FactsheetHarley soulPas encore d'évaluation
- FWD Week 47 Learning Material For Alaric YeoDocument7 pagesFWD Week 47 Learning Material For Alaric YeoarielPas encore d'évaluation
- Reading TAF'sDocument4 pagesReading TAF'sDouglas AlvarezPas encore d'évaluation
- World Is Flat Thomas FriedmanDocument10 pagesWorld Is Flat Thomas FriedmanGilean DalidaPas encore d'évaluation
- Slot 22-23-24 Real Time CommunicationDocument50 pagesSlot 22-23-24 Real Time CommunicationLinh BuiPas encore d'évaluation
- Fame and FortuneDocument8 pagesFame and FortuneNguyễn Đình Tuấn ĐạtPas encore d'évaluation
- Bài Tập Bổ Trợ Nâng Cao Tiếng Anh 7-8-9 Chương Trình Mới (1) -Trang-292-433Document142 pagesBài Tập Bổ Trợ Nâng Cao Tiếng Anh 7-8-9 Chương Trình Mới (1) -Trang-292-433Nguyễn Lâm ThươngPas encore d'évaluation
- TCL 1Document29 pagesTCL 1Nikita Mudras0% (2)
- Filled System Temperature Recorders & Recorder Controllers: SpecificationDocument2 pagesFilled System Temperature Recorders & Recorder Controllers: SpecificationdencryPas encore d'évaluation
- Lean ConstructionDocument37 pagesLean ConstructionMohamed Talaat ElsheikhPas encore d'évaluation
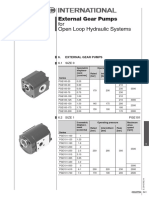
- External Gear Pumps For Open Loop Hydraulic SystemsDocument2 pagesExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievPas encore d'évaluation
- Manual of Armacad v9 PDFDocument102 pagesManual of Armacad v9 PDFCristiana FelicianoPas encore d'évaluation
- Section 02870 Site FurnishingsDocument19 pagesSection 02870 Site FurnishingsMØhãmmed ØwięsPas encore d'évaluation
- Manual of Avionics PDFDocument300 pagesManual of Avionics PDFJhony BhatPas encore d'évaluation
- Most Essential Learning Competencies English 4: Dagundon Elementary SchoolDocument6 pagesMost Essential Learning Competencies English 4: Dagundon Elementary SchoolGhie DomingoPas encore d'évaluation
- Roman Helmet From SivacDocument33 pagesRoman Helmet From SivacArachne DreamweaverPas encore d'évaluation
- Metalastik Type Chevron SpringsDocument6 pagesMetalastik Type Chevron SpringsBo WangPas encore d'évaluation
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- Megger-Mjolner-600 Ds enDocument5 pagesMegger-Mjolner-600 Ds enAmit Kumar KandiPas encore d'évaluation
- CES Wrong Answer SummaryDocument2 pagesCES Wrong Answer SummaryВладислав КомаровPas encore d'évaluation
- EKONET CPRS Importer 26062014Document6 pagesEKONET CPRS Importer 26062014anthony0216Pas encore d'évaluation