Vous aimerez peut-être aussi
- Lhukonzo PDFDocument47 pagesLhukonzo PDFBarima Basoa100% (2)
- Differentiates Between Equations and InequalitiesDocument7 pagesDifferentiates Between Equations and InequalitiesMarc Galos100% (2)
- Arduino and HC-SR04 Ultrasonic SensorDocument11 pagesArduino and HC-SR04 Ultrasonic SensorVarli ArsolPas encore d'évaluation
- Proj 4Document4 pagesProj 4xyzPas encore d'évaluation
- Proj RDocument4 pagesProj RxyzPas encore d'évaluation
- Working With Ultrasonic Sensor Using Arduino BoardDocument6 pagesWorking With Ultrasonic Sensor Using Arduino BoardDaniel Evans100% (2)
- Ultrasonic Sensor HC-SR04 and Arduino TutorialDocument5 pagesUltrasonic Sensor HC-SR04 and Arduino Tutorialmax100% (2)
- 05 Arduino Sensors, Motors and External InterruptsDocument20 pages05 Arduino Sensors, Motors and External InterruptsMalik Adil Farooq100% (2)
- Automatic RainDocument4 pagesAutomatic Rainmahidej823Pas encore d'évaluation
- BESTSENSORPROGRAMMINGDocument6 pagesBESTSENSORPROGRAMMINGChickinPas encore d'évaluation
- Exp 5Document3 pagesExp 5jasmhmyd205Pas encore d'évaluation
- PING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerDocument6 pagesPING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerWafa'a S. Al-HawajrehPas encore d'évaluation
- Automation Code-1Document5 pagesAutomation Code-1api-594759083Pas encore d'évaluation
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhalePas encore d'évaluation
- University of Perpetual Help System Dalta: Ultrasonic Sensor I. ObjectivesDocument11 pagesUniversity of Perpetual Help System Dalta: Ultrasonic Sensor I. ObjectivesReggie PalaganasPas encore d'évaluation
- Ultrasonic Distance Sensor HC-SR04Document3 pagesUltrasonic Distance Sensor HC-SR04Ghigoarta Sergiu Daniel100% (2)
- Ping Ultrasonic Range FinderDocument5 pagesPing Ultrasonic Range FinderIdris Affandy100% (1)
- PW 3 MardiahDocument10 pagesPW 3 MardiahZakuan HassanPas encore d'évaluation
- Chapter 7,8,9,10Document16 pagesChapter 7,8,9,10Amruta AvhalePas encore d'évaluation
- Codigo Tacometro Led 22Document4 pagesCodigo Tacometro Led 22Roger Principe PernaletePas encore d'évaluation
- Exp 09 IotDocument5 pagesExp 09 IotShreya JoshiPas encore d'évaluation
- Exp 09 DA-IoT E279Document5 pagesExp 09 DA-IoT E279Shreya JoshiPas encore d'évaluation
- lab7 SR04 - Lập trình nhúngDocument10 pageslab7 SR04 - Lập trình nhúngNguyen Thi Nhat VyPas encore d'évaluation
- Arduino AnimationDocument10 pagesArduino AnimationAnonymous Ul5eIU7XPas encore d'évaluation
- Complete Guide For Ultrasonic Sensor HC-SR04 With Arduino: DescriptionDocument10 pagesComplete Guide For Ultrasonic Sensor HC-SR04 With Arduino: DescriptionfloodfreakPas encore d'évaluation
- Ultrasonic Range Finder: Step 1: Parts ListDocument10 pagesUltrasonic Range Finder: Step 1: Parts ListKo Pyae SonePas encore d'évaluation
- HC-SR04 Ultrasonic SensorDocument13 pagesHC-SR04 Ultrasonic SensorRehman ChPas encore d'évaluation
- HC-SR04 Ultrasonic Arduino GuideDocument9 pagesHC-SR04 Ultrasonic Arduino GuideNicolas RodriguezPas encore d'évaluation
- Obstacle Avoiding Robot ReportDocument10 pagesObstacle Avoiding Robot ReportMuneeb0% (1)
- Job5 Iot Rani Mu'ArifahDocument9 pagesJob5 Iot Rani Mu'Arifah019Rani Mu'arifahPas encore d'évaluation
- SonarDocument4 pagesSonarChickinPas encore d'évaluation
- Radar ProjectDocument23 pagesRadar ProjectVarun KumarPas encore d'évaluation
- Iot I WSN Sistemi Na Mikrokontrolerskim Razvojnim Platformama #1Document12 pagesIot I WSN Sistemi Na Mikrokontrolerskim Razvojnim Platformama #1ddobriloPas encore d'évaluation
- Project 9 Distance SensorDocument4 pagesProject 9 Distance SensorDarwin VargasPas encore d'évaluation
- Project 10 MOTION ALARMDocument6 pagesProject 10 MOTION ALARMDarwin VargasPas encore d'évaluation
- Practical 6Document7 pagesPractical 6Ayushi SavaniPas encore d'évaluation
- Ultrasonic CodeDocument2 pagesUltrasonic CodeEmmanuel UwayoPas encore d'évaluation
- Electronic 11111Document5 pagesElectronic 11111Kimberly Mae AsisPas encore d'évaluation
- Ece ReportDocument8 pagesEce ReportSharanya SinghPas encore d'évaluation
- 3719 DatasheetDocument6 pages3719 DatasheetAnkit Gupta100% (2)
- The Ultrasonic SensorDocument14 pagesThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Tech ME007 PDFDocument12 pagesTech ME007 PDFfredniels100% (2)
- Arduino Ultrasonic Sensor (HC-SR04 or HY-SRF05)Document2 pagesArduino Ultrasonic Sensor (HC-SR04 or HY-SRF05)DesiantoPas encore d'évaluation
- Radar For Object DetectionDocument12 pagesRadar For Object DetectionGUGULOTHU VENKATESH PRASAD B182380Pas encore d'évaluation
- How To Make A Radar Using Arduino UNO and ProcessingDocument6 pagesHow To Make A Radar Using Arduino UNO and ProcessingLuca Alberti100% (3)
- Arduino Theremin CodeDocument3 pagesArduino Theremin Codeluis.rochaPas encore d'évaluation
- 20BCS1029 Iot 5Document5 pages20BCS1029 Iot 5hustle bustlePas encore d'évaluation
- How To Detect Objects With HC-SR04 Ultrasonic Sensor, Arduino and Millis - Into RoboticsDocument1 pageHow To Detect Objects With HC-SR04 Ultrasonic Sensor, Arduino and Millis - Into RoboticscrazyparkstecPas encore d'évaluation
- Ultrasound Module ModDocument5 pagesUltrasound Module ModAdam MikitzelPas encore d'évaluation
- Arduino Radar Source CodeDocument9 pagesArduino Radar Source CodeRushikesh PatilPas encore d'évaluation
- Arduino Lab - COVID - 5301Document9 pagesArduino Lab - COVID - 5301Bing WangPas encore d'évaluation
- Bansal CsfinalDocument41 pagesBansal CsfinalMudit JainPas encore d'évaluation
- Radar Con Arduino y Processing CodigosDocument5 pagesRadar Con Arduino y Processing CodigosJorgeCastilloPas encore d'évaluation
- Complete Guide For Ultrasonic Sensor HCDocument6 pagesComplete Guide For Ultrasonic Sensor HCEng Urimubenshi DonatPas encore d'évaluation
- IoT Lab ManualDocument60 pagesIoT Lab ManualSH GamingPas encore d'évaluation
- CourseContent - IoT and ML Training BoltDocument28 pagesCourseContent - IoT and ML Training BoltRizulPas encore d'évaluation
- Control Activity 5Document4 pagesControl Activity 5IvanPas encore d'évaluation
- Industrial Electronics & Robotics: Lab WorkDocument8 pagesIndustrial Electronics & Robotics: Lab WorkIam QaXimPas encore d'évaluation
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDD'EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDPas encore d'évaluation
- Digital Signal Processing: Instant AccessD'EverandDigital Signal Processing: Instant AccessÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkD'EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkPas encore d'évaluation
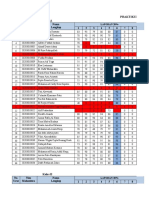
- Praktikum Bahasa Pemrograman Angkatan 2020 Kelas ADocument4 pagesPraktikum Bahasa Pemrograman Angkatan 2020 Kelas ADhendy Dafeta MahardichaPas encore d'évaluation
- Praktikum Bahasa Pemrograman Angkatan 2020 Kelas A: 1 2 3 4 5 6 7 8 No. Urut Nim Mahasiswa Nama LengkapDocument12 pagesPraktikum Bahasa Pemrograman Angkatan 2020 Kelas A: 1 2 3 4 5 6 7 8 No. Urut Nim Mahasiswa Nama LengkapDhendy Dafeta MahardichaPas encore d'évaluation
- All of Cheat Pokemon Fire Red and LeafgreenDocument49 pagesAll of Cheat Pokemon Fire Red and LeafgreenDhendy Dafeta MahardichaPas encore d'évaluation
- 50+ Contoh Soal Latihan UN Dan UNBK Bahasa iNGGRIS SMK Paket ADocument15 pages50+ Contoh Soal Latihan UN Dan UNBK Bahasa iNGGRIS SMK Paket ADhendy Dafeta MahardichaPas encore d'évaluation
- Gitlab Seismic Shift in Application Security WhitepaperDocument16 pagesGitlab Seismic Shift in Application Security Whitepaperkakayow457Pas encore d'évaluation
- 12 EnglishDocument244 pages12 EnglishItgel GansuhPas encore d'évaluation
- Dale's Cone of ExperienceDocument18 pagesDale's Cone of ExperienceSuzanne SarsueloPas encore d'évaluation
- Write A Program To Demonstrate Use of Implementing InterfacesDocument14 pagesWrite A Program To Demonstrate Use of Implementing Interfacesnithya elysiumPas encore d'évaluation
- Biography of Ibn KathirDocument3 pagesBiography of Ibn KathirMohammad Zehab100% (6)
- GoldilocksDocument12 pagesGoldilocksYaina IvanovaPas encore d'évaluation
- Elest LES: Irtcip TheDocument184 pagesElest LES: Irtcip TheRowan G100% (4)
- System UnitDocument19 pagesSystem Unitizzul_125z1419Pas encore d'évaluation
- Present Simple Tense I Dodati Nastavke - S Ili - Es Na Sledeće GlagoleDocument20 pagesPresent Simple Tense I Dodati Nastavke - S Ili - Es Na Sledeće GlagoleDraganaPas encore d'évaluation
- Concept of Poetry by AristotleDocument3 pagesConcept of Poetry by AristotleKamran AhmadPas encore d'évaluation
- Project ARAL For ForumDocument15 pagesProject ARAL For ForumMariel Jane IgnaligPas encore d'évaluation
- Mock Test 014 - Thi THDocument6 pagesMock Test 014 - Thi THQuoc Hoang HuyPas encore d'évaluation
- BugreportDocument13 pagesBugreportDanielaPas encore d'évaluation
- A Pintool For Detecting Race in OpenMP ProgramsDocument10 pagesA Pintool For Detecting Race in OpenMP ProgramsIn-Bon KuhPas encore d'évaluation
- Vedic Math PresentationDocument11 pagesVedic Math PresentationAamna RazaPas encore d'évaluation
- Ringkasan Mengajar Kelas Tahun 6Document4 pagesRingkasan Mengajar Kelas Tahun 6ASMAH LAILI BINTI MOHD YUNUS MoePas encore d'évaluation
- Africa by David Diop With MessageDocument4 pagesAfrica by David Diop With MessageNeil Patrick Jallorina67% (3)
- State of The Art PDFDocument5 pagesState of The Art PDFFernando Andres Carrascal ContrerasPas encore d'évaluation
- Assingment Oral CommunicationDocument14 pagesAssingment Oral Communicationqasehola100% (1)
- Instruções de Elevação para Perfurador de Rocha: HE 122 / HE 119 39 KG HE 300 89 KG HL 300 94 KG HL 300 S 92 KGDocument64 pagesInstruções de Elevação para Perfurador de Rocha: HE 122 / HE 119 39 KG HE 300 89 KG HL 300 94 KG HL 300 S 92 KGJoão Guardado100% (1)
- Section 2 GrammerDocument13 pagesSection 2 GrammerAhlamRahoumaPas encore d'évaluation
- Film Guide CluelessDocument8 pagesFilm Guide CluelessValeria GomezPas encore d'évaluation
- Sri Gopala Bhatta GoswamiDocument8 pagesSri Gopala Bhatta GoswamispshankarjpsPas encore d'évaluation
- Chapter Four - French Baroque Opera - Lully and RameauDocument3 pagesChapter Four - French Baroque Opera - Lully and RameauDiana Alejandra Trujillo MartínezPas encore d'évaluation
- 2.1 Advanced Processor TechnologyDocument40 pages2.1 Advanced Processor Technologydhivya aPas encore d'évaluation
- Bug Bounty CheatsheetDocument53 pagesBug Bounty CheatsheetMichel EdiPas encore d'évaluation
- Prose, The Lottery, Ida B. Wells-BarnettDocument28 pagesProse, The Lottery, Ida B. Wells-BarnettGeraldine L. GaddiPas encore d'évaluation
- SSC - 8 - H - Ho7.2 - Civilising The Native, Educating The NationDocument5 pagesSSC - 8 - H - Ho7.2 - Civilising The Native, Educating The NationBhakti AgarwalPas encore d'évaluation