Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- JBL Class D Training WorkbookDocument24 pagesJBL Class D Training WorkbookGerardo Mendez CamarilloPas encore d'évaluation
- Epson R800 SMDocument174 pagesEpson R800 SMInteletracPas encore d'évaluation
- LTE System Constant IntroductionDocument15 pagesLTE System Constant Introductionindrajeetc_1Pas encore d'évaluation
- Performance Improvement of Single Phase Motors Using Power ElectronicsDocument7 pagesPerformance Improvement of Single Phase Motors Using Power ElectronicshezugPas encore d'évaluation
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDocument7 pagesVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanPas encore d'évaluation
- Variable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Document71 pagesVariable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. Numan100% (1)
- Variable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Document72 pagesVariable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanPas encore d'évaluation
- Vector Control of Cage Induction Motors A Physical Insight, 1996 PDFDocument10 pagesVector Control of Cage Induction Motors A Physical Insight, 1996 PDFAli H. NumanPas encore d'évaluation
- Vector Control of AC Induction MotorDocument7 pagesVector Control of AC Induction MotorAli H. NumanPas encore d'évaluation
- Variable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Document10 pagesVariable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Ali H. NumanPas encore d'évaluation
- VHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Document10 pagesVHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Ali H. NumanPas encore d'évaluation
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanPas encore d'évaluation
- Modeling and Simulation of A Stepping Motor, 1969.Document3 pagesModeling and Simulation of A Stepping Motor, 1969.Ali H. NumanPas encore d'évaluation
- Sin EncoderDocument6 pagesSin Encoderboynew87Pas encore d'évaluation
- Reduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Document2 pagesReduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Ali H. NumanPas encore d'évaluation
- A Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Document9 pagesA Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Ali H. NumanPas encore d'évaluation
- Direct Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeDocument7 pagesDirect Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeAli H. NumanPas encore d'évaluation
- A New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Document9 pagesA New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Ali H. NumanPas encore d'évaluation
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићPas encore d'évaluation
- Zero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Document6 pagesZero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Ali H. NumanPas encore d'évaluation
- DSP Arch Past-Present-FutureDocument14 pagesDSP Arch Past-Present-FutureSayan GhoshPas encore d'évaluation
- BLDC Resonant PoleDocument8 pagesBLDC Resonant Poleav5009Pas encore d'évaluation
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDocument7 pagesVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanPas encore d'évaluation
- Effective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltDocument7 pagesEffective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltAli H. NumanPas encore d'évaluation
- Sensor Less Control of IM - With or Without Signal InjectionDocument24 pagesSensor Less Control of IM - With or Without Signal Injectionsajs201Pas encore d'évaluation
- Sensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Document135 pagesSensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanPas encore d'évaluation
- Digital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Document6 pagesDigital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Ali H. NumanPas encore d'évaluation
- Digital Control Methods For Current Sharing of Interleaved Synchronous, 2004.Document7 pagesDigital Control Methods For Current Sharing of Interleaved Synchronous, 2004.Ali H. NumanPas encore d'évaluation
- Digital Simulation of Field Oriented Control Using ANSIM Program, 1996.Document4 pagesDigital Simulation of Field Oriented Control Using ANSIM Program, 1996.Ali H. NumanPas encore d'évaluation
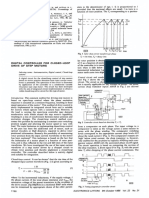
- Digital Controller For Closed-Loop Drive of Step Motors, 1986.Document2 pagesDigital Controller For Closed-Loop Drive of Step Motors, 1986.Ali H. NumanPas encore d'évaluation
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanPas encore d'évaluation
- DC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenDocument19 pagesDC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenAli H. NumanPas encore d'évaluation
- Aoc Le32a1326 Le32a3520 715G4629 - M01 - 000 - 004KDocument83 pagesAoc Le32a1326 Le32a3520 715G4629 - M01 - 000 - 004KFrancisco Antonio50% (2)
- عم ليصوت نويلم 2 لابولجل Fiberirs موكافناDocument8 pagesعم ليصوت نويلم 2 لابولجل Fiberirs موكافناAlexander WiesePas encore d'évaluation
- GPS GLONASS Antenna UFLDocument1 pageGPS GLONASS Antenna UFLMaxtenaPas encore d'évaluation
- Keep in Mind The Five Key Test Points LCD Screen Logic BoardDocument2 pagesKeep in Mind The Five Key Test Points LCD Screen Logic BoardClubedoTecnicoPas encore d'évaluation
- Vacuostato Norgren 33DDocument1 pageVacuostato Norgren 33DBase SistemasPas encore d'évaluation
- Most BMW Fibra OpticaDocument6 pagesMost BMW Fibra OpticaSilvian MerceaPas encore d'évaluation
- Hikvision Supported Device On MilestoneDocument53 pagesHikvision Supported Device On MilestoneFadli BadarudinPas encore d'évaluation
- GEC-31X Excitation Control System User Manual V1.00Document94 pagesGEC-31X Excitation Control System User Manual V1.00Muslim Firnanda0% (1)
- Heating Failure Detection PDFDocument3 pagesHeating Failure Detection PDFHugh MantaPas encore d'évaluation
- Easy Bluetooth: ManualDocument4 pagesEasy Bluetooth: ManualSelmon MascarenhasPas encore d'évaluation
- Computer GenerationsDocument10 pagesComputer GenerationsJimuel Libunao SupanPas encore d'évaluation
- Kathrein 2017 Directional Antennas 4 Ports Dual Polarization 45°Document48 pagesKathrein 2017 Directional Antennas 4 Ports Dual Polarization 45°RobertPas encore d'évaluation
- Mounika.M: Education Program Institution %/CGPA YearDocument3 pagesMounika.M: Education Program Institution %/CGPA Yearmounika morampudiPas encore d'évaluation
- SEMIKRON Shortform-Catalogue 2016-05-01 enDocument111 pagesSEMIKRON Shortform-Catalogue 2016-05-01 enTahar BenacherinePas encore d'évaluation
- Fairchild Power Mosfets Qfet Line Card: Improved Gate Charge CharacteristicsDocument8 pagesFairchild Power Mosfets Qfet Line Card: Improved Gate Charge CharacteristicsvetchboyPas encore d'évaluation
- CMTS OverviewDocument54 pagesCMTS OverviewAmol AmollPas encore d'évaluation
- Unit 1 - Microprocessor & Its Application - WWW - Rgpvnotes.inDocument12 pagesUnit 1 - Microprocessor & Its Application - WWW - Rgpvnotes.inJayesh JoshiPas encore d'évaluation
- FP1189 PDFDocument12 pagesFP1189 PDFthuyPas encore d'évaluation
- Advr 54Document5 pagesAdvr 54RonaldCarrasquelPas encore d'évaluation
- Gunn DiodeDocument4 pagesGunn Diodedhruvipokar84Pas encore d'évaluation
- LABVIEW OverviewDocument24 pagesLABVIEW OverviewbigirimwPas encore d'évaluation
- Multiple Choice Questions For EEDocument3 pagesMultiple Choice Questions For EEMark John DrilonPas encore d'évaluation
- Capacitor Coupled Transistor Inverter Laboratory Excercise 4 - 2 AnswerDocument3 pagesCapacitor Coupled Transistor Inverter Laboratory Excercise 4 - 2 AnswerLear SoyonPas encore d'évaluation
- CBC1726-DH-2X - E11F02P50: Product ClassificationDocument4 pagesCBC1726-DH-2X - E11F02P50: Product ClassificationMohammad AlswilemPas encore d'évaluation
- 4 BJTDocument24 pages4 BJTmirulazwanPas encore d'évaluation
- Adjustment: 1. FirmwareDocument15 pagesAdjustment: 1. Firmwarerocklando777Pas encore d'évaluation
- 9.3 Astable Multivibrator: Return NextDocument8 pages9.3 Astable Multivibrator: Return Nextsankar2015Pas encore d'évaluation