Vous aimerez peut-être aussi
- A Practical Guide To SplineDocument8 pagesA Practical Guide To SplineDavid PomaPas encore d'évaluation
- Quasi-Monte Carlo Methods in Finance: With Application to Optimal Asset AllocationD'EverandQuasi-Monte Carlo Methods in Finance: With Application to Optimal Asset AllocationPas encore d'évaluation
- Inequalities for Differential and Integral EquationsD'EverandInequalities for Differential and Integral EquationsPas encore d'évaluation
- Delay Differential Equations: With Applications in Population DynamicsD'EverandDelay Differential Equations: With Applications in Population DynamicsPas encore d'évaluation
- Stochastic Models: Estimation and Control: v. 2D'EverandStochastic Models: Estimation and Control: v. 2Pas encore d'évaluation
- The SABR ModelDocument9 pagesThe SABR Modelabhishek210585Pas encore d'évaluation
- InterpolationDocument13 pagesInterpolationEr Aamir MaqboolPas encore d'évaluation
- Discrete Kalman FilterDocument44 pagesDiscrete Kalman FilterEngr EbiPas encore d'évaluation
- Runge-Kutta 4th Order Method ForDocument7 pagesRunge-Kutta 4th Order Method ForvinaykumarPas encore d'évaluation
- Interpolation 12786416547886 Phpapp01Document17 pagesInterpolation 12786416547886 Phpapp01Pedro AntunesPas encore d'évaluation
- The Heston Mode - A Practical ApproachDocument53 pagesThe Heston Mode - A Practical ApproachGiancarlo GentiliPas encore d'évaluation
- Deriving The Normal Equation Using Matrix CalculusDocument18 pagesDeriving The Normal Equation Using Matrix CalculusSara AllenPas encore d'évaluation
- Laplace TransformDocument35 pagesLaplace TransformBravo AagPas encore d'évaluation
- A Tutorial On Principal Component AnalysisDocument29 pagesA Tutorial On Principal Component AnalysisrigastiPas encore d'évaluation
- Introduction To Time Series AnalysisDocument17 pagesIntroduction To Time Series Analysismary joy apan0% (1)
- FINA3010 Summary For Lecture 1,2Document9 pagesFINA3010 Summary For Lecture 1,2Koon Sing ChanPas encore d'évaluation
- Localized Feature ExtractionDocument6 pagesLocalized Feature ExtractionsujithaPas encore d'évaluation
- SSRN Id1404905 PDFDocument20 pagesSSRN Id1404905 PDFalexa_sherpyPas encore d'évaluation
- Difference EquationDocument22 pagesDifference EquationWeijie ChenPas encore d'évaluation
- Table of Contents - LatestDocument5 pagesTable of Contents - LatestGaurav ManglaPas encore d'évaluation
- GaborDocument25 pagesGaborLita NovitasariPas encore d'évaluation
- Kalman Filter: Lecture NotesDocument9 pagesKalman Filter: Lecture NotesjprahladanPas encore d'évaluation
- Tensor ProductDocument9 pagesTensor Productjj3problembearPas encore d'évaluation
- Cubic Spline CodeDocument3 pagesCubic Spline CodeSanjana KarpePas encore d'évaluation
- Thomson Reuters Eikon Adfin Term Structure Calculation GuideDocument44 pagesThomson Reuters Eikon Adfin Term Structure Calculation GuideHải Dương100% (1)
- Tutorial On Stochastic Differential EquationsDocument38 pagesTutorial On Stochastic Differential Equationsmariuccio254100% (1)
- Singular Value Decomposition Tutorial - Kirk BakerDocument24 pagesSingular Value Decomposition Tutorial - Kirk BakerolgiasPas encore d'évaluation
- From Implied To Spot Volatilities: Valdo DurrlemanDocument21 pagesFrom Implied To Spot Volatilities: Valdo DurrlemanginovainmonaPas encore d'évaluation
- Stochastic Calculus, Filtering, and Stochastic ControlDocument265 pagesStochastic Calculus, Filtering, and Stochastic ControlIgor F. C. Battazza100% (1)
- Navier Stokes PDFDocument22 pagesNavier Stokes PDFKhirupasagar RavibaskarPas encore d'évaluation
- ISYE Midterm Project: Allan Zhang June 2019Document6 pagesISYE Midterm Project: Allan Zhang June 2019Allan ZhangPas encore d'évaluation
- Newsvendor ProblemDocument24 pagesNewsvendor Problembrentk112Pas encore d'évaluation
- Chapter 4 PDEDocument17 pagesChapter 4 PDEHui JingPas encore d'évaluation
- Mutual InformationDocument8 pagesMutual Informationbalasha_937617969Pas encore d'évaluation
- Crank NicolsonDocument45 pagesCrank NicolsonSHKPas encore d'évaluation
- Navier Stokes Eq.Document58 pagesNavier Stokes Eq.Anthoni Raj100% (1)
- Chapter 04c Frequency Filtering (Circulant Matrices) 2Document48 pagesChapter 04c Frequency Filtering (Circulant Matrices) 2Manu PrasadPas encore d'évaluation
- Semi Definite and Cone ProgrammingDocument89 pagesSemi Definite and Cone ProgrammingRuby ChanPas encore d'évaluation
- SSA Beginners Guide v9Document22 pagesSSA Beginners Guide v9김진석Pas encore d'évaluation
- Vol Smile Problem Lipton Risk 02Document5 pagesVol Smile Problem Lipton Risk 02dombrecherPas encore d'évaluation
- Applied Linear Regression Models 4th Ed NoteDocument46 pagesApplied Linear Regression Models 4th Ed Noteken_ng333Pas encore d'évaluation
- Upwind Scheme: Model EquationDocument3 pagesUpwind Scheme: Model EquationChez GabiPas encore d'évaluation
- Introduction To Stochastic ProcessesDocument22 pagesIntroduction To Stochastic ProcessesAbolfazl Jalal AbadiPas encore d'évaluation
- Maple - SolvingSolving Stochastic Differential Equations in Maple Stochastic Differential Equations in MapleDocument3 pagesMaple - SolvingSolving Stochastic Differential Equations in Maple Stochastic Differential Equations in MapleMahfud MuqoddasPas encore d'évaluation
- Finite Volume MethodsDocument7 pagesFinite Volume MethodsRafael Santos RoquePas encore d'évaluation
- Bateman H Partial Differential Equations of Mathematical PhysicsDocument556 pagesBateman H Partial Differential Equations of Mathematical PhysicssarsaranPas encore d'évaluation
- MSM Specification: Discrete TimeDocument5 pagesMSM Specification: Discrete TimeNicolas MarionPas encore d'évaluation
- Raul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloDocument4 pagesRaul C. Cosare v. Broadcom Asia Inc. and Dante ArevaloRam Migue SaintPas encore d'évaluation
- Orphanage Project ProposalDocument3 pagesOrphanage Project ProposaldtimtimanPas encore d'évaluation
- Editing Packs I Maybe Will NeedDocument3 pagesEditing Packs I Maybe Will NeedMijo SusićPas encore d'évaluation
- Tapspp0101 PDFDocument119 pagesTapspp0101 PDFAldriel GabayanPas encore d'évaluation
- Biodiversity Management Bureau: Repucjuf The Philippines Department of Environment and Natural ResourcesDocument36 pagesBiodiversity Management Bureau: Repucjuf The Philippines Department of Environment and Natural ResourcesMarijenLeañoPas encore d'évaluation
- Cold Rolled CoilDocument23 pagesCold Rolled Coilmametcool100% (1)
- Auto Setting DataDocument6 pagesAuto Setting Datahalo91Pas encore d'évaluation
- Food Safety and StandardsDocument8 pagesFood Safety and StandardsArifSheriffPas encore d'évaluation
- Eligibility To Become IAS Officer: Career As A IAS Officer About IAS OfficerDocument4 pagesEligibility To Become IAS Officer: Career As A IAS Officer About IAS Officersamiie30Pas encore d'évaluation
- Catalog Electrical Products en - 339 - 1Document20 pagesCatalog Electrical Products en - 339 - 1H 8CPas encore d'évaluation
- Lamaran NongyiDocument12 pagesLamaran NongyiTonoTonyPas encore d'évaluation
- 2 Days Meat Processing Training Program (Kalayaan Laguna)Document2 pages2 Days Meat Processing Training Program (Kalayaan Laguna)Jals SaripadaPas encore d'évaluation
- ADM3346A Midterm Fall 2010 SolutionDocument10 pagesADM3346A Midterm Fall 2010 SolutionJohn BecksPas encore d'évaluation
- DS - LWT300 - SF - A4 EN Rev BDocument4 pagesDS - LWT300 - SF - A4 EN Rev BZts MksPas encore d'évaluation
- Green Tyre TechnologyDocument4 pagesGreen Tyre TechnologyAnuj SharmaPas encore d'évaluation
- BrochureDocument8 pagesBrochurevacmanilaPas encore d'évaluation
- SeminarDocument88 pagesSeminarMaha MuflehPas encore d'évaluation
- ECON 202 Optional Problem SetDocument3 pagesECON 202 Optional Problem SetAnthony SabarilloPas encore d'évaluation
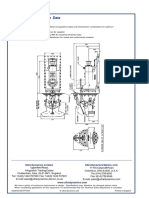
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesPas encore d'évaluation
- Adaptation Fom Squirrels GamesDocument2 pagesAdaptation Fom Squirrels GamesDenny Boy MochranPas encore d'évaluation
- ALP Final Test KeyDocument3 pagesALP Final Test KeyPetro Nela50% (2)
- Retail Scenario in IndiaDocument10 pagesRetail Scenario in IndiaSeemaNegiPas encore d'évaluation
- CIVPRO - Case Compilation No. 2Document95 pagesCIVPRO - Case Compilation No. 2Darla GreyPas encore d'évaluation
- EIV Operation ManualDocument339 pagesEIV Operation ManualJJSPas encore d'évaluation
- XXX RadiographsDocument48 pagesXXX RadiographsJoseph MidouPas encore d'évaluation
- QUIZ - PFRS 1 - FIRST TIME ADOPTION OF PFRSsDocument2 pagesQUIZ - PFRS 1 - FIRST TIME ADOPTION OF PFRSsGonzalo Jr. Ruales86% (7)
- EECI-Modules-2010Document1 pageEECI-Modules-2010maialenzitaPas encore d'évaluation
- Micromagnetic Simulation of Magnetic SystemsDocument12 pagesMicromagnetic Simulation of Magnetic SystemsImri SsPas encore d'évaluation
- School MemoDocument1 pageSchool MemoBellaPas encore d'évaluation
- Train TicketDocument2 pagesTrain TicketGautam KumarPas encore d'évaluation