Vous aimerez peut-être aussi
- MIT8 03SCF16 PracticeFinalExam1Document15 pagesMIT8 03SCF16 PracticeFinalExam1Gavin BirlaPas encore d'évaluation
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghPas encore d'évaluation
- ForcedDocument2 pagesForcedChristopher J CampbellPas encore d'évaluation
- Final PDFDocument13 pagesFinal PDFAlexandre Magno Bernardo FontouraPas encore d'évaluation
- Lecture 8Document23 pagesLecture 8Jarom SaavedraPas encore d'évaluation
- Jackson 3.12 Homework Problem SolutionDocument4 pagesJackson 3.12 Homework Problem SolutionJulieth Bravo OrdoñezPas encore d'évaluation
- Part 2Document8 pagesPart 2princess EvangelinePas encore d'évaluation
- MCE693/793: Analysis and Control of Nonlinear Systems: Introduction To Describing FunctionsDocument31 pagesMCE693/793: Analysis and Control of Nonlinear Systems: Introduction To Describing FunctionsAbdesselem BoulkrounePas encore d'évaluation
- Midterm CheatsheetDocument3 pagesMidterm CheatsheetJoel Tan Yi JiePas encore d'évaluation
- Chapter 9 Mathematical Models of Continuous Systems: Vibration of Strings (Cables)Document17 pagesChapter 9 Mathematical Models of Continuous Systems: Vibration of Strings (Cables)spaljPas encore d'évaluation
- Chapter 9Document28 pagesChapter 9wlsh2001Pas encore d'évaluation
- 117Document11 pages117Mohammad Imran ShafiPas encore d'évaluation
- 03 - Seismic Input PDFDocument31 pages03 - Seismic Input PDFHerman AucampPas encore d'évaluation
- Dynamic System Models ShortDocument19 pagesDynamic System Models ShortKj_bdPas encore d'évaluation
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARPas encore d'évaluation
- Considerations On Finite and Fixed Time ConvergenceDocument4 pagesConsiderations On Finite and Fixed Time ConvergenceAntonio EstradaPas encore d'évaluation
- PTB Talk Sanya 2019Document37 pagesPTB Talk Sanya 2019Himadri BarmanPas encore d'évaluation
- PRT GRHT: PRT C PRT T R RX Ry RZDocument13 pagesPRT GRHT: PRT C PRT T R RX Ry RZAlinaBogoiPas encore d'évaluation
- Quantum Scattering Basic ProblemsDocument23 pagesQuantum Scattering Basic ProblemsJeison RojasPas encore d'évaluation
- Chapter 9. Transmission LinesDocument28 pagesChapter 9. Transmission Lines채정우Pas encore d'évaluation
- Poster PT Symmetry Breaking PhysicsDocument30 pagesPoster PT Symmetry Breaking PhysicsHimadri BarmanPas encore d'évaluation
- Narayanan 2020Document18 pagesNarayanan 2020Chương Quách VănPas encore d'évaluation
- 2016 Exam 3 SolutionDocument6 pages2016 Exam 3 Solution김명주Pas encore d'évaluation
- EE C222/ME C237 - Spring'18 - Lecture 5 Notes: Murat Arcak January 31 2018Document6 pagesEE C222/ME C237 - Spring'18 - Lecture 5 Notes: Murat Arcak January 31 2018SBPas encore d'évaluation
- CM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMDocument4 pagesCM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMsudhildeyPas encore d'évaluation
- PTB Talk Sinp 2016Document25 pagesPTB Talk Sinp 2016Himadri BarmanPas encore d'évaluation
- Chap 2Document6 pagesChap 2김민성Pas encore d'évaluation
- TelegrphDocument4 pagesTelegrphimohammadghiyasiPas encore d'évaluation
- Stat 210B HWK #5 Solutions: Garvesh RaskuttiDocument5 pagesStat 210B HWK #5 Solutions: Garvesh RaskuttiDaniyal AsifPas encore d'évaluation
- Lect2 AgmDocument63 pagesLect2 AgmShu Shujaat LinPas encore d'évaluation
- On Fractional Kinetic Equations: R.K. SaxenaDocument8 pagesOn Fractional Kinetic Equations: R.K. SaxenaNikos MantzakourasPas encore d'évaluation
- Shaomei Fang Jinyan Li and Zhenfu CaiDocument9 pagesShaomei Fang Jinyan Li and Zhenfu CaiGHERFI ABDELHAFIDPas encore d'évaluation
- Response Terhadap Gaya Eksitasi Harmonik (Lanjutan) : Getaran Mekanik STT MandalaDocument18 pagesResponse Terhadap Gaya Eksitasi Harmonik (Lanjutan) : Getaran Mekanik STT MandalasuryamanPas encore d'évaluation
- 3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Document5 pages3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Ana ScaletPas encore d'évaluation
- Exam 2 FormulaDocument4 pagesExam 2 Formulatapanmukhopadhyay066Pas encore d'évaluation
- Supplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyDocument6 pagesSupplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyMichelle Ann OrendainPas encore d'évaluation
- 1 s2.0 S1474667015364715 Main PDFDocument6 pages1 s2.0 S1474667015364715 Main PDFVignesh RamakrishnanPas encore d'évaluation
- 3.use of Laplase Transform PDFDocument5 pages3.use of Laplase Transform PDFLeonard PhilipPas encore d'évaluation
- Convection BLDocument77 pagesConvection BLAHMED EL HAMRIPas encore d'évaluation
- FreeFEM Tutorial ShovkunDocument6 pagesFreeFEM Tutorial ShovkunMohamad TayeaPas encore d'évaluation
- P524 Higher-GenusDocument3 pagesP524 Higher-Genusm rPas encore d'évaluation
- Useful Formulae That May Give You Some Help For Sem I ENG2091Document2 pagesUseful Formulae That May Give You Some Help For Sem I ENG2091LegacyAgePas encore d'évaluation
- Estimates For Periodic Zakharov-Shabat Operators 2Document16 pagesEstimates For Periodic Zakharov-Shabat Operators 2yehezkel parraPas encore d'évaluation
- Multiple View Geometry: Exercise Sheet 8Document3 pagesMultiple View Geometry: Exercise Sheet 8Berkay ÖzerbayPas encore d'évaluation
- On The Description of Scalars: X. Wang and Q. SuzukiDocument8 pagesOn The Description of Scalars: X. Wang and Q. SuzukiShri SinghPas encore d'évaluation
- Useful Formulae: x + γx˙ + ω x = fDocument4 pagesUseful Formulae: x + γx˙ + ω x = fjecabuzzPas encore d'évaluation
- Vector Derivatives: Ds DX 1 ( Det G)Document5 pagesVector Derivatives: Ds DX 1 ( Det G)Peter He ZhengPas encore d'évaluation
- LE 1 - Cheat SheetDocument1 pageLE 1 - Cheat SheetRogie M BernabePas encore d'évaluation
- ELEC 353 Formula Sheet - Winter 2009Document1 pageELEC 353 Formula Sheet - Winter 2009Juampi MochenPas encore d'évaluation
- Exercise 1. Solve The Linearized Governing Equations (Laplace and Bottom Boundary Condition, EquaDocument5 pagesExercise 1. Solve The Linearized Governing Equations (Laplace and Bottom Boundary Condition, EquaSwathi BDPas encore d'évaluation
- Lecture 10 - Transmission Lines: X X y yDocument8 pagesLecture 10 - Transmission Lines: X X y ysamer saeedPas encore d'évaluation
- AppendicesDocument9 pagesAppendicesخالدمحمدPas encore d'évaluation
- 6 HandoutDocument5 pages6 Handoutaladar520Pas encore d'évaluation
- Numerical Solution of Diffusion Equation: Julian JaramilloDocument30 pagesNumerical Solution of Diffusion Equation: Julian JaramilloAndrés Jireh FuentesPas encore d'évaluation
- Handling Non-Convexities: Entrepreneurship and Financial FrictionsDocument5 pagesHandling Non-Convexities: Entrepreneurship and Financial FrictionsSaptarshi MukherjeePas encore d'évaluation
- 2021 AMAM Exam PaperDocument4 pages2021 AMAM Exam PaperzeliawillscumbergPas encore d'évaluation
- Qualifying Fall 202 0Document9 pagesQualifying Fall 202 0Saswata MandalPas encore d'évaluation
- ELEN3012 - 2020 Part 2Document7 pagesELEN3012 - 2020 Part 2Bongani MofokengPas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99D'EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Pas encore d'évaluation
- Physics of Nanoscale Transistors - An Introduction To Electronics From The Bottom UpDocument52 pagesPhysics of Nanoscale Transistors - An Introduction To Electronics From The Bottom UpLIAKMANPas encore d'évaluation
- AFM at Video Rate and BeyondDocument66 pagesAFM at Video Rate and BeyondLIAKMANPas encore d'évaluation
- Graphene PN JunctionsDocument58 pagesGraphene PN JunctionsLIAKMAN0% (1)
- Carbon Nanotube NanoNeedle NanomeniscusDocument25 pagesCarbon Nanotube NanoNeedle NanomeniscusLIAKMANPas encore d'évaluation
- Nano-Mechanics:From Nanotechnology To BiologyDocument36 pagesNano-Mechanics:From Nanotechnology To BiologyLIAKMANPas encore d'évaluation
- Scanning Probe Acceleration Microscopy: Towards Real Time Reconstruction of Tip-Sample Forces in Tapping Mode AFMDocument40 pagesScanning Probe Acceleration Microscopy: Towards Real Time Reconstruction of Tip-Sample Forces in Tapping Mode AFMLIAKMANPas encore d'évaluation
- FIRAT: A Fast and Sensitive Probe Structure For SPMDocument38 pagesFIRAT: A Fast and Sensitive Probe Structure For SPMLIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-Lecture38Document29 pagesPrinciples of Semiconductor Devices-Lecture38LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L27Document24 pagesPrinciples of Semiconductor Devices-L27LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-Lecture40Document24 pagesPrinciples of Semiconductor Devices-Lecture40LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L34Document23 pagesPrinciples of Semiconductor Devices-L34LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-Lecture39Document19 pagesPrinciples of Semiconductor Devices-Lecture39LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-Lecture36Document23 pagesPrinciples of Semiconductor Devices-Lecture36LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L32Document25 pagesPrinciples of Semiconductor Devices-L32LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L26Document18 pagesPrinciples of Semiconductor Devices-L26LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L28Document22 pagesPrinciples of Semiconductor Devices-L28LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L20Document29 pagesPrinciples of Semiconductor Devices-L20LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L30Document23 pagesPrinciples of Semiconductor Devices-L30LIAKMANPas encore d'évaluation
- Principles of Semiconductor Devices-L18Document22 pagesPrinciples of Semiconductor Devices-L18LIAKMANPas encore d'évaluation
- Webinar Gizi - Patho StuntingDocument16 pagesWebinar Gizi - Patho StuntingMiftahul HikmahPas encore d'évaluation
- Lecture2 GranulopoiesisDocument9 pagesLecture2 GranulopoiesisAfifa Prima GittaPas encore d'évaluation
- Antena TelnetDocument4 pagesAntena TelnetMarco PiambaPas encore d'évaluation
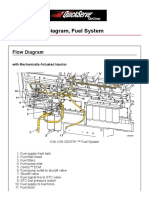
- Cummin C1100 Fuel System Flow DiagramDocument8 pagesCummin C1100 Fuel System Flow DiagramDaniel KrismantoroPas encore d'évaluation
- Nadee 3Document1 pageNadee 3api-595436597Pas encore d'évaluation
- Quarter 1-Week 2 - Day 2.revisedDocument4 pagesQuarter 1-Week 2 - Day 2.revisedJigz FamulaganPas encore d'évaluation
- A Survey On Security and Privacy Issues of Bitcoin-1Document39 pagesA Survey On Security and Privacy Issues of Bitcoin-1Ramineni HarshaPas encore d'évaluation
- WarringFleets Complete PDFDocument26 pagesWarringFleets Complete PDFlingshu8100% (1)
- Executive Summary-P-5 181.450 To 222Document14 pagesExecutive Summary-P-5 181.450 To 222sat palPas encore d'évaluation
- Subject Manual Tle 7-8Document11 pagesSubject Manual Tle 7-8Rhayan Dela Cruz DaquizPas encore d'évaluation
- Canon Powershot S50 Repair Manual (CHAPTER 4. PARTS CATALOG) PDFDocument13 pagesCanon Powershot S50 Repair Manual (CHAPTER 4. PARTS CATALOG) PDFRita CaselliPas encore d'évaluation
- Student Exploration: Inclined Plane - Simple MachineDocument9 pagesStudent Exploration: Inclined Plane - Simple MachineLuka MkrtichyanPas encore d'évaluation
- Model 255 Aerosol Generator (Metone)Document20 pagesModel 255 Aerosol Generator (Metone)Ali RizviPas encore d'évaluation
- Continue Practice Exam Test Questions Part 1 of The SeriesDocument7 pagesContinue Practice Exam Test Questions Part 1 of The SeriesKenn Earl Bringino VillanuevaPas encore d'évaluation
- Obligatoire: Connectez-Vous Pour ContinuerDocument2 pagesObligatoire: Connectez-Vous Pour ContinuerRaja Shekhar ChinnaPas encore d'évaluation
- How To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7Document20 pagesHow To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7kukaPas encore d'évaluation
- Prevention of Waterborne DiseasesDocument2 pagesPrevention of Waterborne DiseasesRixin JamtshoPas encore d'évaluation
- Hidrl1 PDFDocument7 pagesHidrl1 PDFRajesh Kumar100% (1)
- Lamentation of The Old Pensioner FinalDocument17 pagesLamentation of The Old Pensioner FinalRahulPas encore d'évaluation
- Nanolithography - Processing Methods PDFDocument10 pagesNanolithography - Processing Methods PDFNilesh BhardwajPas encore d'évaluation
- Chapter 2Document13 pagesChapter 2Kumkumo Kussia KossaPas encore d'évaluation
- Unsuccessful MT-SM DeliveryDocument2 pagesUnsuccessful MT-SM DeliveryPitam MaitiPas encore d'évaluation
- Workbook Group TheoryDocument62 pagesWorkbook Group TheoryLi NguyenPas encore d'évaluation
- Applications SeawaterDocument23 pagesApplications SeawaterQatar home RentPas encore d'évaluation
- W25509 PDF EngDocument11 pagesW25509 PDF EngNidhi SinghPas encore d'évaluation
- Module 2 MANA ECON PDFDocument5 pagesModule 2 MANA ECON PDFMeian De JesusPas encore d'évaluation
- Biography Thesis ExamplesDocument7 pagesBiography Thesis Examplesreneewardowskisterlingheights100% (2)
- Assistant Cook Learner Manual EnglishDocument152 pagesAssistant Cook Learner Manual EnglishSang Putu Arsana67% (3)
- Economic Review English 17-18Document239 pagesEconomic Review English 17-18Shashank SinghPas encore d'évaluation
- Drug Addiction Final (Term Paper)Document15 pagesDrug Addiction Final (Term Paper)Dessa Patiga IIPas encore d'évaluation