Vous aimerez peut-être aussi
- Teoria Dos Grafos - Emparelhamento e MatchingDocument15 pagesTeoria Dos Grafos - Emparelhamento e MatchingJackson LucasPas encore d'évaluation
- Manual Atlas - Ti Tatiana Marceda BachDocument25 pagesManual Atlas - Ti Tatiana Marceda Bachtatibach100% (2)
- C ObjetosDocument514 pagesC ObjetosJ Ricardo VeigaPas encore d'évaluation
- Integração Protheus X IReportDocument8 pagesIntegração Protheus X IReportRafaelPitzerPas encore d'évaluation
- Matemática A - Exponenciais e LogaritmosDocument7 pagesMatemática A - Exponenciais e LogaritmosMatemtica2015Pas encore d'évaluation
- AP 01 - Algoritmo e Programação EstruturadaDocument4 pagesAP 01 - Algoritmo e Programação EstruturadaGorgias YllanaPas encore d'évaluation
- Funcoes TriggersDocument27 pagesFuncoes TriggerseduardosantosPas encore d'évaluation
- Apostila AutoCAD 2008Document99 pagesApostila AutoCAD 2008Augusto Carlos CostaPas encore d'évaluation
- Metodologia 8D para resolução de problemasDocument3 pagesMetodologia 8D para resolução de problemasRodrigo Noguerol CorreaPas encore d'évaluation
- Exercicios C++Document30 pagesExercicios C++venomvPas encore d'évaluation
- Manual de Instalação Central de Alarme ECP MAX 4Document36 pagesManual de Instalação Central de Alarme ECP MAX 4servulofreitas54% (26)
- Posonic AllDocument33 pagesPosonic AllEduardo LagareiroPas encore d'évaluation
- A Importância Do Método CientíficoDocument4 pagesA Importância Do Método CientíficoAna88% (16)
- Signo, Significante e SignificadoDocument4 pagesSigno, Significante e SignificadocoimbravalerioPas encore d'évaluation
- Apostila GCCDocument170 pagesApostila GCClupe13Pas encore d'évaluation
- CursosGratuitosTECNOLOGIADA INFORMACAOSemestre2012Document2 pagesCursosGratuitosTECNOLOGIADA INFORMACAOSemestre2012Dierla Pires CostaPas encore d'évaluation
- A LEITURA FORA DO LIVRO Lúcia Santaella PDFDocument2 pagesA LEITURA FORA DO LIVRO Lúcia Santaella PDFHenryPas encore d'évaluation
- Introdução à programação web com PHPDocument56 pagesIntrodução à programação web com PHPEude Soares de Lacerda100% (3)
- Direitos humanos e investigação particularDocument7 pagesDireitos humanos e investigação particularGesergio SantosPas encore d'évaluation
- Problema de Monty HallDocument4 pagesProblema de Monty HallMarcos Antônio TanakaPas encore d'évaluation
- Scrum - A Metodologia Ágil Explicada de Forma DefinitivaDocument10 pagesScrum - A Metodologia Ágil Explicada de Forma DefinitivabetobitkingPas encore d'évaluation
- Computadores pedagógicos escolasDocument4 pagesComputadores pedagógicos escolasluizg791Pas encore d'évaluation
- Assinado de forma digital lei institui política de dados abertos em AlagoasDocument100 pagesAssinado de forma digital lei institui política de dados abertos em AlagoasmundobrPas encore d'évaluation
- Criando SQLite offline com HTML5Document6 pagesCriando SQLite offline com HTML5Ricardo RomeroPas encore d'évaluation
- Implementação de Um Centro de Tratamento de Incidente de Segurança Da Informação No Decom/cefetmgDocument41 pagesImplementação de Um Centro de Tratamento de Incidente de Segurança Da Informação No Decom/cefetmgPatrick Leandro MagalhãesPas encore d'évaluation
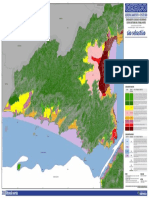
- Gerenciamento costeiro e zoneamento ecológico-econômico do litoral norte de SPDocument1 pageGerenciamento costeiro e zoneamento ecológico-econômico do litoral norte de SPGustavo Cruz100% (1)
- Paradox NpartDocument4 pagesParadox NpartCicero MilanPas encore d'évaluation
- Probabilidade de anagramas, sorteios e relatóriosDocument4 pagesProbabilidade de anagramas, sorteios e relatóriosAlessandra DoriniPas encore d'évaluation
- 2015 04 Links Da Deep Web AbrilDocument24 pages2015 04 Links Da Deep Web AbrilOsairManassan100% (1)
- Roteiro Eclipse JavaDocument3 pagesRoteiro Eclipse JavaTeresa OliveiraPas encore d'évaluation