Vous aimerez peut-être aussi
- CNC MP 2011 Physique 1 CorrigeDocument12 pagesCNC MP 2011 Physique 1 CorrigeraedPas encore d'évaluation
- CNC MP 2011 Physique 1 CorrigeDocument12 pagesCNC MP 2011 Physique 1 CorrigeraedPas encore d'évaluation
- CNC MP 2011 Physique 1 EpreuveDocument9 pagesCNC MP 2011 Physique 1 EpreuveraedPas encore d'évaluation
- 08 CH1 LAHAYE Corrections DifferentielleDocument9 pages08 CH1 LAHAYE Corrections Differentiellemrd9991Pas encore d'évaluation
- CNC MP 2010 Physique 2 EpreuveDocument10 pagesCNC MP 2010 Physique 2 EpreuveYassir Sadiq ElfilaliPas encore d'évaluation
- CNC MP 2011 Chimie CorrigeDocument12 pagesCNC MP 2011 Chimie CorrigeYassir Sadiq ElfilaliPas encore d'évaluation
- CNC MP 2011 Chimie EpreuveDocument6 pagesCNC MP 2011 Chimie Epreuveafif ikramePas encore d'évaluation
- Lif4 td9 correctionIIDocument5 pagesLif4 td9 correctionIItakeshirohPas encore d'évaluation
- S5 Mat Perm-RevDocument5 pagesS5 Mat Perm-RevYassir Sadiq ElfilaliPas encore d'évaluation
- S17 LieV2Document4 pagesS17 LieV2Yassir Sadiq ElfilaliPas encore d'évaluation
- Corr TD Fichiers Info PDFDocument3 pagesCorr TD Fichiers Info PDFYassir Sadiq ElfilaliPas encore d'évaluation
- 31 IntegrationDocument3 pages31 IntegrationYassir Sadiq ElfilaliPas encore d'évaluation
- 3 ComplexityDocument18 pages3 ComplexityYassir Sadiq ElfilaliPas encore d'évaluation
- 3811 Activite GpsDocument11 pages3811 Activite GpsYassir Sadiq ElfilaliPas encore d'évaluation
- S19 Trace NulleDocument3 pagesS19 Trace NulleYassir Sadiq Elfilali100% (1)
- S11 InaDocument2 pagesS11 InaYassir Sadiq Elfilali100% (1)
- Resume Matrices PDFDocument7 pagesResume Matrices PDFkajtiPas encore d'évaluation
- 2020 08 07 MP PDFDocument150 pages2020 08 07 MP PDFYassir Sadiq ElfilaliPas encore d'évaluation
- MatstocorrDocument3 pagesMatstocorrYassir Sadiq ElfilaliPas encore d'évaluation
- Equations de Maxwell Energetique Du Champ Electromagnetique ExercicesDocument6 pagesEquations de Maxwell Energetique Du Champ Electromagnetique ExercicesYassir Sadiq ElfilaliPas encore d'évaluation
- CH II Cours 2 - Programmation Python - Initialisation, Traduction PDFDocument8 pagesCH II Cours 2 - Programmation Python - Initialisation, Traduction PDFYassir Sadiq ElfilaliPas encore d'évaluation
- Conduction Et Conducto Convection Thermiques Cours PDFDocument27 pagesConduction Et Conducto Convection Thermiques Cours PDFYassir Sadiq ElfilaliPas encore d'évaluation
- Corrige Devoir 1 4 PDFDocument6 pagesCorrige Devoir 1 4 PDFYassir Sadiq ElfilaliPas encore d'évaluation
- S17 LieV2Document4 pagesS17 LieV2Yassir Sadiq ElfilaliPas encore d'évaluation
- Corrige Devoir 1 4 PDFDocument6 pagesCorrige Devoir 1 4 PDFYassir Sadiq ElfilaliPas encore d'évaluation
- Corrige Devoir 12Document7 pagesCorrige Devoir 12Yassir Sadiq ElfilaliPas encore d'évaluation
- Dm2 CorrectionDocument3 pagesDm2 CorrectionnainaPas encore d'évaluation
- CH II Cours 6 - Algorithmes de Tri PDFDocument2 pagesCH II Cours 6 - Algorithmes de Tri PDFYassir Sadiq ElfilaliPas encore d'évaluation
- Corrige Devoir 10 3 PDFDocument4 pagesCorrige Devoir 10 3 PDFYassir Sadiq ElfilaliPas encore d'évaluation
- Eng Ren AgesDocument7 pagesEng Ren AgesAbou LoujainePas encore d'évaluation
- TD - Thermo CorDocument4 pagesTD - Thermo CordalyyyamaraPas encore d'évaluation
- RecaDocument26 pagesRecaAymane Aymane RajawiPas encore d'évaluation
- Rapport de Travaux Pratique de La Thermodynamique: 2 PE° +012P+30 +128412309213°Document9 pagesRapport de Travaux Pratique de La Thermodynamique: 2 PE° +012P+30 +128412309213°EDERRAZ AbdessmadPas encore d'évaluation
- Cataloguelactchadv 2015Document84 pagesCataloguelactchadv 2015Al byPas encore d'évaluation
- 3 Calcul ErreurDocument4 pages3 Calcul ErreurtakiPas encore d'évaluation
- Chapitre 3 Le Second Principe STDocument44 pagesChapitre 3 Le Second Principe STArmel YmgPas encore d'évaluation
- Chute Libre Verticale D Un Solide Cours LatexDocument4 pagesChute Libre Verticale D Un Solide Cours Latexaqsdf2009Pas encore d'évaluation
- Puissance Et Travail Théorème D'énergie CinétiqueDocument3 pagesPuissance Et Travail Théorème D'énergie Cinétiquebilalradi777Pas encore d'évaluation
- Cours MFPCDocument18 pagesCours MFPCSyphax HDPas encore d'évaluation
- 2021 École Polytechnique Physique Et SI MP Corrige 1Document8 pages2021 École Polytechnique Physique Et SI MP Corrige 1Abdellatif HmairrouPas encore d'évaluation
- Cycle de RankineDocument8 pagesCycle de RankineLuka ModrićPas encore d'évaluation
- ResumeDocument2 pagesResumeMounaim Matini100% (1)
- Examens Corrigés Thermo 1 FSA PDFDocument22 pagesExamens Corrigés Thermo 1 FSA PDFjhonwaker67% (3)
- 1LTZ022 Wu 1409Document8 pages1LTZ022 Wu 1409Abdelmadjid BatirPas encore d'évaluation
- 5 Thermodynamique Cinetique 1Document4 pages5 Thermodynamique Cinetique 1azzamPas encore d'évaluation
- elec_chap11 (1)Document33 pageselec_chap11 (1)thebastienproductionPas encore d'évaluation
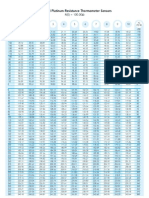
- Pt100 TableDocument2 pagesPt100 Tablehs1986Pas encore d'évaluation
- Des ExercicesDocument13 pagesDes ExercicesHoussam Haddani83% (6)
- Le Diagramme Thermodynamique Du R134aDocument20 pagesLe Diagramme Thermodynamique Du R134amohamed mãjňøönPas encore d'évaluation
- Conduction Thermique PDFDocument10 pagesConduction Thermique PDFSouhaib SoloPas encore d'évaluation
- Thermodynamique 1Document16 pagesThermodynamique 1Soumaila SdgPas encore d'évaluation
- DistillationExtraction V2Document137 pagesDistillationExtraction V2Boubaker Fartas100% (3)
- TD N°1 Thermometrie + SolutionDocument4 pagesTD N°1 Thermometrie + SolutionAbd El Basset ünkut100% (3)
- TP Tmi Gaz ParfaitDocument8 pagesTP Tmi Gaz ParfaitImen NaijaPas encore d'évaluation
- DM31 1213Document7 pagesDM31 1213iraoui jamal (Ebay)Pas encore d'évaluation
- Compresores Bitzer Variador de FrecuenciasDocument20 pagesCompresores Bitzer Variador de FrecuenciasLuisFernandoAlmaoPas encore d'évaluation
- QCM Diriges ThermodynamiqueDocument2 pagesQCM Diriges ThermodynamiquedannPas encore d'évaluation
- PB - CH1 - 3 La Résistance Thermique D'une ParoiDocument4 pagesPB - CH1 - 3 La Résistance Thermique D'une ParoiMeher BenyahyaPas encore d'évaluation
- TD t3 2nd-PpeDocument9 pagesTD t3 2nd-PpeEric Bienvenu TiomoPas encore d'évaluation
- 1 - Cours - Résumé - Thermodynamique Appliquée + Exercixes Dapplications 2020-2021Document19 pages1 - Cours - Résumé - Thermodynamique Appliquée + Exercixes Dapplications 2020-2021Ferhane Fatima zahra100% (2)