Vous aimerez peut-être aussi
- Chapter Twelve: DC Chopper DrivesDocument24 pagesChapter Twelve: DC Chopper Drivesfor lifePas encore d'évaluation
- L2. Single Phase Ac Voltage ControllersDocument104 pagesL2. Single Phase Ac Voltage ControllersShivaram Vadla100% (2)
- Chapter Five: Ac-Ac Conversion: Ac Voltage ControllerDocument56 pagesChapter Five: Ac-Ac Conversion: Ac Voltage Controllerfor lifePas encore d'évaluation
- Power Quality - Model ExamDocument2 pagesPower Quality - Model ExamDinesh PeterPas encore d'évaluation
- L9 Single Phase VSIDocument114 pagesL9 Single Phase VSIPrashant Surana100% (1)
- Generation of High DC, AC, Impulse Voltages and Currents - Tripping and Control of Impulse GeneratorsDocument14 pagesGeneration of High DC, AC, Impulse Voltages and Currents - Tripping and Control of Impulse GeneratorssaiPas encore d'évaluation
- UNIT-1 of HVEDocument8 pagesUNIT-1 of HVEAayush Patidar100% (2)
- TTL LOGIC Family - Hariram-1Document16 pagesTTL LOGIC Family - Hariram-1Hari RamPas encore d'évaluation
- Power Quality 2 Marks and 16 MarksDocument6 pagesPower Quality 2 Marks and 16 MarksBala MuruganPas encore d'évaluation
- HV Mcq'sDocument9 pagesHV Mcq'sasfandyar khanPas encore d'évaluation
- Nyquist Plot and Stability Criteria - GATE Study Material in PDFDocument7 pagesNyquist Plot and Stability Criteria - GATE Study Material in PDFnidhi tripathiPas encore d'évaluation
- Measurement of VelocityDocument59 pagesMeasurement of VelocityYogeshBhatt100% (1)
- Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Document69 pagesPower Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Sankaran Nampoothiri KrishnanPas encore d'évaluation
- L3. Single Phase Ac Voltage ControllersDocument68 pagesL3. Single Phase Ac Voltage ControllersSourabh KhandelwalPas encore d'évaluation
- 01 Matlab BasicsDocument20 pages01 Matlab BasicsOmed GharebPas encore d'évaluation
- Transformer Tap ChangerDocument2 pagesTransformer Tap ChangerIskeel Sadiq100% (1)
- Automation and Control EngineeringDocument246 pagesAutomation and Control EngineeringB J ISAC ABRAHAM PAULPas encore d'évaluation
- Power Electronics: Single Phase AC-AC ConvertersDocument18 pagesPower Electronics: Single Phase AC-AC ConvertersMaruti MohitePas encore d'évaluation
- CYCLOCONVERTERSDocument46 pagesCYCLOCONVERTERSHari Haran100% (1)
- Nptel: High Voltage DC Transmission - Web CourseDocument2 pagesNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- SolutionDocument80 pagesSolution김정훈100% (1)
- Asynchronous Operationand ResynchronizationDocument15 pagesAsynchronous Operationand Resynchronizationquangspkt0% (1)
- Control System Lab Manual by AMIT KUMARDocument35 pagesControl System Lab Manual by AMIT KUMARamit kumar83% (6)
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroPas encore d'évaluation
- Power Electronics QuizDocument1 pagePower Electronics QuizHamza MustafaPas encore d'évaluation
- Focussed Question Bank With AnswersDocument18 pagesFocussed Question Bank With AnswersHari Krishnan100% (1)
- Rectifier PDFDocument26 pagesRectifier PDFShiny SinghalPas encore d'évaluation
- Integral Cycle Speed Control of Single Phase Induction Motor.Document47 pagesIntegral Cycle Speed Control of Single Phase Induction Motor.lonemubashir50% (2)
- Design Via Root LocusDocument53 pagesDesign Via Root LocusAhmed ShareefPas encore d'évaluation
- EEEB123 - Chapter 9 Sinusoids and PhasorsDocument79 pagesEEEB123 - Chapter 9 Sinusoids and PhasorsMuhammad Umair Felix0% (1)
- AC-DC Converter - DDocument39 pagesAC-DC Converter - DBishnu100% (1)
- Commutation Circuits PDFDocument2 pagesCommutation Circuits PDFRalphPas encore d'évaluation
- DC Link CurrentDocument8 pagesDC Link CurrentsubbannaPas encore d'évaluation
- Utilization of Electrical EnergyDocument4 pagesUtilization of Electrical Energykartheek4270% (1)
- Bode PlotDocument7 pagesBode Plotnabilo20Pas encore d'évaluation
- Ee8391 - Electromagnetic Theory: Unit 1-Introduction Two MarksDocument43 pagesEe8391 - Electromagnetic Theory: Unit 1-Introduction Two Markssignjpcoe0% (1)
- 12V To 120V DC - DC Converter Using Power Electronics For Higher Efficiency and Reliable OperationDocument23 pages12V To 120V DC - DC Converter Using Power Electronics For Higher Efficiency and Reliable OperationRaghav ChawlaPas encore d'évaluation
- DMA Controller - 8237Document9 pagesDMA Controller - 8237Umesh Harihara sudanPas encore d'évaluation
- Single Phase InverterDocument29 pagesSingle Phase InverterEla ResearchPas encore d'évaluation
- PLC Unit 2-1 PDFDocument44 pagesPLC Unit 2-1 PDFMahesh ShendePas encore d'évaluation
- Voltage Source InverterDocument77 pagesVoltage Source InverterSaied Aly SalamahPas encore d'évaluation
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDocument8 pagesImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- Effect of Source InductanceDocument25 pagesEffect of Source InductanceSriram Anil Kumar Gandham100% (1)
- Unit6 Resonance Circuit (VTU)Document23 pagesUnit6 Resonance Circuit (VTU)fanah_13100% (1)
- Power System 2Document103 pagesPower System 2msathish_eeePas encore d'évaluation
- Boost DesignDocument4 pagesBoost DesignmuthukumartharaniPas encore d'évaluation
- Question Bank-EE2352 - Solid State DrivesDocument4 pagesQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- PLCDocument46 pagesPLChazlanPas encore d'évaluation
- Transmission Line GIL System DesignDocument6 pagesTransmission Line GIL System DesignadauPas encore d'évaluation
- InverterDocument53 pagesInverterAgus SetyawanPas encore d'évaluation
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationD'EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationPas encore d'évaluation
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsD'EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsPas encore d'évaluation
- 15EC73 - PE - Mod 3 - QB - 12102019 PDFDocument35 pages15EC73 - PE - Mod 3 - QB - 12102019 PDFAishwaryaPas encore d'évaluation
- Ex Product Overview Control Device System 8040 en GB RstahlDocument9 pagesEx Product Overview Control Device System 8040 en GB RstahlAriana GrandePas encore d'évaluation
- Y 9 Gszoo 18 HT 3 Si 4 TCP 6 KDocument17 pagesY 9 Gszoo 18 HT 3 Si 4 TCP 6 KRati SrivastavaPas encore d'évaluation
- 2013 Catalog KabeldonCA 1-420 KV SOT 7,2-36 KV Pages3-4!3!10 EnglishDocument7 pages2013 Catalog KabeldonCA 1-420 KV SOT 7,2-36 KV Pages3-4!3!10 Englishiyilmaz1Pas encore d'évaluation
- Elaskon Multifunktionsspray Spezial TDS GB-enDocument2 pagesElaskon Multifunktionsspray Spezial TDS GB-enFabrizio GiaimoPas encore d'évaluation
- Flender StandardCouplings FLE10 ENDocument376 pagesFlender StandardCouplings FLE10 ENRichard SilvaPas encore d'évaluation
- Sundesa v. Tejarah Int'l - ComplaintDocument108 pagesSundesa v. Tejarah Int'l - ComplaintSarah BursteinPas encore d'évaluation
- E.M.D Chapter - 02Document69 pagesE.M.D Chapter - 02Adityasingh ChauhanPas encore d'évaluation
- 2.6.3 Practice - Quadratic Functions (Practice)Document10 pages2.6.3 Practice - Quadratic Functions (Practice)HyounJoun KangPas encore d'évaluation
- Liquid CrystalDocument44 pagesLiquid Crystalshreeji2017Pas encore d'évaluation
- Bmz1Kas 1,8/3 KV - Medium Voltage Power Cable: DescriptionDocument3 pagesBmz1Kas 1,8/3 KV - Medium Voltage Power Cable: DescriptionMauricio AgudeloPas encore d'évaluation
- Voltage Regulation of Single Phase TransformerDocument6 pagesVoltage Regulation of Single Phase TransformerMuhammad Ali HaiderPas encore d'évaluation
- Chee 312 Final Lab 3 ReportDocument25 pagesChee 312 Final Lab 3 ReportTshegofatso GotsilengPas encore d'évaluation
- Radiation Protection in Digital Radiology: Optimisation of Digital Fluoroscopy L04Document60 pagesRadiation Protection in Digital Radiology: Optimisation of Digital Fluoroscopy L04Valantina ShapelPas encore d'évaluation
- Vdma 442 T. Klenk Et Al. Conductive SimmerringsDocument7 pagesVdma 442 T. Klenk Et Al. Conductive SimmerringsChandrasekar KrishnamurthyPas encore d'évaluation
- Seesaw CandleDocument4 pagesSeesaw CandleAbhisheik TripathiPas encore d'évaluation
- The Physics of MusicDocument13 pagesThe Physics of MusicKavithira DevarajanPas encore d'évaluation
- Geometry FormulasDocument5 pagesGeometry FormulasAlyzza Rose Pampliega LedesmaPas encore d'évaluation
- ICEMS 2013 Final Program PosterDocument30 pagesICEMS 2013 Final Program PosterAmit PatelPas encore d'évaluation
- Philosophy of ChemistryDocument16 pagesPhilosophy of ChemistrymikadikaPas encore d'évaluation
- Earthquake-Resistant BuildingDocument28 pagesEarthquake-Resistant BuildingAbhay JainPas encore d'évaluation
- Christian ControversiesDocument192 pagesChristian ControversiesAransh SinghPas encore d'évaluation
- Compaction and Pressureless Sintering of ZirconiaDocument9 pagesCompaction and Pressureless Sintering of ZirconiaWalaa Hassan Salem Abd El KareemPas encore d'évaluation
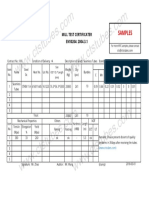
- Jis G3445 STKM 11a MTCDocument1 pageJis G3445 STKM 11a MTCNgoc PhatPas encore d'évaluation
- DAB End Suction Centrifugal PumpsDocument321 pagesDAB End Suction Centrifugal PumpsFILID MAD100% (1)
- Hycox 20171116-A Yangzhou Hycox Industrial Co.,Ltd - BoliviaDocument3 pagesHycox 20171116-A Yangzhou Hycox Industrial Co.,Ltd - BoliviaCristian Sahonero MuñozPas encore d'évaluation
- Understanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesDocument3 pagesUnderstanding The Element-Gain Paradox For Receiving Arrays Using Poynting StreamlinesTommy AsselinPas encore d'évaluation
- Remote Sensing Techniques and GIS - Lecture Notes, Study Material and Important Questions, AnswersDocument5 pagesRemote Sensing Techniques and GIS - Lecture Notes, Study Material and Important Questions, AnswersM.V. TV100% (1)
- JEST-Volume 16-Issue 4 - Page 36-44Document9 pagesJEST-Volume 16-Issue 4 - Page 36-44Abi NikilPas encore d'évaluation
- Solution Manual Heat and Mass Transfer A Practical Approach 2nd Edition Cengel CHDocument62 pagesSolution Manual Heat and Mass Transfer A Practical Approach 2nd Edition Cengel CHJohn A. CenizaPas encore d'évaluation
- TOE-606-3.1 vs-606 PC3 Instructions (Spec U)Document157 pagesTOE-606-3.1 vs-606 PC3 Instructions (Spec U)JonPas encore d'évaluation