Vous aimerez peut-être aussi
- Internet Des Objets Arduino - Séance 1Document21 pagesInternet Des Objets Arduino - Séance 1Abdallahi SidiPas encore d'évaluation
- Arduino JusteDocument75 pagesArduino JusteTertio Edah IIPas encore d'évaluation
- tp1 Arduino IdeDocument9 pagestp1 Arduino IdeAbbassi BilelPas encore d'évaluation
- TP S EmbarquéDocument77 pagesTP S EmbarquéSalahe LaouarPas encore d'évaluation
- Internet Des Objets TP1 LamiaDocument5 pagesInternet Des Objets TP1 Lamianour rachdiPas encore d'évaluation
- LivretArduinoCRAS PDFDocument37 pagesLivretArduinoCRAS PDFfadacenglin100% (1)
- Livre T Arduino CrasDocument37 pagesLivre T Arduino CraskairotdfPas encore d'évaluation
- Chap4 ArduinoDocument37 pagesChap4 Arduinodammak.ammarPas encore d'évaluation
- Chapitre IiDocument6 pagesChapitre Ii彡mήΞHo爪乇Ros YTPas encore d'évaluation
- 4 Arduino PDFDocument38 pages4 Arduino PDFRedOne Sob100% (2)
- Kesaco ArduinoDocument6 pagesKesaco Arduinogenius02Pas encore d'évaluation
- ArduinooDocument24 pagesArduinooTurbo DieselPas encore d'évaluation
- Presentation GTHDocument22 pagesPresentation GTHAkinlola YawoloPas encore d'évaluation
- Cours 2 - La Carte Arduino UnoDocument2 pagesCours 2 - La Carte Arduino UnoMomo TlmsmohPas encore d'évaluation
- Projets Arduino (Richard Baker)Document61 pagesProjets Arduino (Richard Baker)cai jun ainaPas encore d'évaluation
- 1 - Dossier ARDUINO PDFDocument14 pages1 - Dossier ARDUINO PDFMohamed Moudine100% (2)
- TP1 PDFDocument5 pagesTP1 PDFadel100% (1)
- ArduinoDocument25 pagesArduinoKazuhiro HikariPas encore d'évaluation
- ArdkDocument1 pageArdkernest muhasaPas encore d'évaluation
- His To RiqueDocument10 pagesHis To RiqueMimi NourPas encore d'évaluation
- COURS ArduinoDocument23 pagesCOURS ArduinoHOARAUPas encore d'évaluation
- SpetchDocument3 pagesSpetch4eapolytechniquePas encore d'évaluation
- TP Systmes EmbarqusDocument77 pagesTP Systmes EmbarqusFadwaPas encore d'évaluation
- Tuto SUPINFODocument9 pagesTuto SUPINFOHyacinthe KOSSIPas encore d'évaluation
- Chap 01Document16 pagesChap 01Fares ChetouhPas encore d'évaluation
- ArduinoDocument44 pagesArduinoAli Abdmouleh100% (1)
- Débuter Avec ARDUINODocument21 pagesDébuter Avec ARDUINOTim BorgoPas encore d'évaluation
- Fiche Méthode Arduino Grove 5èmeDocument3 pagesFiche Méthode Arduino Grove 5èmeHamza KhilaPas encore d'évaluation
- Presentation ArduinoDocument16 pagesPresentation ArduinotestPas encore d'évaluation
- Cahier 0 InitialisationDocument21 pagesCahier 0 InitialisationyassinedoPas encore d'évaluation
- Debuter Avec Une Carte ArduinoDocument10 pagesDebuter Avec Une Carte ArduinoartustPas encore d'évaluation
- Arduino Et MathsDocument7 pagesArduino Et MathsHallPas encore d'évaluation
- Atelier Arduino. Initiation À La Mise en Oeuvre Matérielle Et Logicielle de L Arduino. Novembre 2006Document37 pagesAtelier Arduino. Initiation À La Mise en Oeuvre Matérielle Et Logicielle de L Arduino. Novembre 2006AktibCodePas encore d'évaluation
- cours arduinoDocument48 pagescours arduinoM 8Pas encore d'évaluation
- Arduino Pour Les Nuls (v231112)Document4 pagesArduino Pour Les Nuls (v231112)SAMBOPas encore d'évaluation
- Cours Arduino v0.2Document25 pagesCours Arduino v0.2Djo MounirPas encore d'évaluation
- Cours Arduino EST AGADIR STATIONDocument51 pagesCours Arduino EST AGADIR STATIONstifanpousri4122004Pas encore d'évaluation
- Département Physique: Faculté Des Sciences de TunisDocument8 pagesDépartement Physique: Faculté Des Sciences de TunisNesrine ZouariPas encore d'évaluation
- ArduinoDocument117 pagesArduinoGenie Mbaye100% (2)
- ArduinoDocument115 pagesArduinoPeter Kaiche100% (1)
- ModelDocument25 pagesModelkeusra germain zrakpaPas encore d'évaluation
- Formation Arduino TutorielDocument119 pagesFormation Arduino Tutorielalex dupuit100% (3)
- 0709 ArduinoDocument6 pages0709 Arduinohamza ayechePas encore d'évaluation
- Chapitr 1 ARDUINODocument11 pagesChapitr 1 ARDUINOSalouma SaloumaPas encore d'évaluation
- Bloc Elec - Sequence 0 - Partie 1 - EtudiantDocument11 pagesBloc Elec - Sequence 0 - Partie 1 - EtudianthassenPas encore d'évaluation
- Laboratoire Arduino w20Document21 pagesLaboratoire Arduino w20jadPas encore d'évaluation
- Maîtriser La Programmation Arduino Un Guide Rapide de La ProgrammationDocument100 pagesMaîtriser La Programmation Arduino Un Guide Rapide de La ProgrammationPierro TechPas encore d'évaluation
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- Arduino | Pas à pas: Le guide ultime du débutantD'EverandArduino | Pas à pas: Le guide ultime du débutantPas encore d'évaluation
- Projets Arduino avec Tinkercad: Concevoir et programmer des projets basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad: Concevoir et programmer des projets basés sur Arduino avec TinkercadÉvaluation : 1 sur 5 étoiles1/5 (1)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Introduction à la gestion des opérations: Viser l'excellence opérationnelleD'EverandIntroduction à la gestion des opérations: Viser l'excellence opérationnellePas encore d'évaluation
- Maîtriser Python: Guide Complet: La collection informatiqueD'EverandMaîtriser Python: Guide Complet: La collection informatiquePas encore d'évaluation
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Scrivener plus simple pour iPad et iPhone: Collection pratique Guide Kermen, #3D'EverandScrivener plus simple pour iPad et iPhone: Collection pratique Guide Kermen, #3Pas encore d'évaluation
- Programmer en C | Pas à Pas: Le guide simple pour les débutantsD'EverandProgrammer en C | Pas à Pas: Le guide simple pour les débutantsPas encore d'évaluation
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Microprocesseurs Et MicrocontrôleursDocument169 pagesMicroprocesseurs Et MicrocontrôleursDhekra JebaliPas encore d'évaluation
- Dclics Parcours RobotiqueDocument108 pagesDclics Parcours RobotiqueadmmehdiPas encore d'évaluation
- Livret Linking Words Talk To The Monkey EAEDocument10 pagesLivret Linking Words Talk To The Monkey EAEkk100% (1)
- Hard PCDocument114 pagesHard PCYouness AadPas encore d'évaluation
- Afficheur LCD PPTDocument24 pagesAfficheur LCD PPTSeddik MhamdiPas encore d'évaluation
- IcheroufeneOmar PDFDocument77 pagesIcheroufeneOmar PDFtayeb FittPas encore d'évaluation
- 7 Graphe de MontageDocument2 pages7 Graphe de Montagefokou.simplicegmail.com Fokou Simplice100% (1)
- 5 ch9 Exc PDFDocument11 pages5 ch9 Exc PDFMohamed Ali ChebbiPas encore d'évaluation
- 6ordinateur PeripheriquesDocument2 pages6ordinateur PeripheriquesAnonymous Wpl47Bwu4Pas encore d'évaluation
- GELE2112 Chapitre1Document61 pagesGELE2112 Chapitre1Leila FakhfakhPas encore d'évaluation
- Analyse de BesoinDocument5 pagesAnalyse de BesoinSeddik MhamdiPas encore d'évaluation
- 7 MPPTDocument6 pages7 MPPTFouad BahriPas encore d'évaluation
- 7 MPPTDocument6 pages7 MPPTFouad BahriPas encore d'évaluation
- 7 MPPTDocument6 pages7 MPPTFouad BahriPas encore d'évaluation
- Cuivre Et Alliages PDFDocument6 pagesCuivre Et Alliages PDFSeddik MhamdiPas encore d'évaluation
- الرسم الثلاثي الابعادDocument22 pagesالرسم الثلاثي الابعادSeddik MhamdiPas encore d'évaluation
- 6ordinateur PeripheriquesDocument2 pages6ordinateur PeripheriquesAnonymous Wpl47Bwu4Pas encore d'évaluation
- Bateau - Guide Pratique D'entretien Et de Réparation Des Moteurs DieselsDocument217 pagesBateau - Guide Pratique D'entretien Et de Réparation Des Moteurs DieselsChaker Amir67% (3)
- Cours Alternateur NS 2019Document23 pagesCours Alternateur NS 2019Seddik MhamdiPas encore d'évaluation
- الرسم الثلاثي الابعادDocument22 pagesالرسم الثلاثي الابعادSeddik MhamdiPas encore d'évaluation
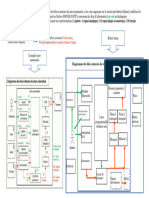
- Diagramme Blocs Internes Sumo ArduinoDocument1 pageDiagramme Blocs Internes Sumo Arduinoapi-257663744Pas encore d'évaluation
- Programmation de La Carte ArduinoDocument7 pagesProgrammation de La Carte Arduinoalae ddinePas encore d'évaluation
- Pfe MbarekDocument49 pagesPfe MbarekabfstbmsodPas encore d'évaluation
- Cahier Des ChargesDocument7 pagesCahier Des ChargesLaaroussi AmirPas encore d'évaluation
- Plante ConnectéDocument36 pagesPlante Connectéa02919560Pas encore d'évaluation
- Perfectionnez-Vous Dans La Programmation Arduino: Concevez Des Matrices de LedDocument13 pagesPerfectionnez-Vous Dans La Programmation Arduino: Concevez Des Matrices de LedAbdelhadi AZPas encore d'évaluation
- F006086 PDFDocument435 pagesF006086 PDFgaetantaffo100% (2)
- Elektor n°463-464 2017-01-02Document132 pagesElektor n°463-464 2017-01-02alex bousquetPas encore d'évaluation
- A Lire-Ardublock Education - 1.7 PDFDocument9 pagesA Lire-Ardublock Education - 1.7 PDFSebsi BejboujPas encore d'évaluation
- Rapport de PPP S5 Sory Sidibe Arrosage AutoDocument8 pagesRapport de PPP S5 Sory Sidibe Arrosage AutoSory SidibéPas encore d'évaluation
- CPR TP 4Document5 pagesCPR TP 4mohammed el azhariPas encore d'évaluation
- Rapport Eclairage Intelligent-FRDocument25 pagesRapport Eclairage Intelligent-FRlacothPas encore d'évaluation
- PJ 1793Document4 pagesPJ 1793koyabePas encore d'évaluation
- Documentation Robot Suiveur de LignesDocument37 pagesDocumentation Robot Suiveur de LignesdaemonmxPas encore d'évaluation
- Note ArduinoDocument42 pagesNote Arduinoayman lamzouriPas encore d'évaluation
- Formation Arduino TutorielDocument119 pagesFormation Arduino Tutorielalex dupuit100% (3)
- Pfe - Smart - Car (2) (Récupération Automatique) - 2Document42 pagesPfe - Smart - Car (2) (Récupération Automatique) - 2Anas EdkiouakPas encore d'évaluation
- Catalogue - WeMos - 105207Document140 pagesCatalogue - WeMos - 105207Beaucarne MBUEDAPas encore d'évaluation
- Suite de MemoireDocument8 pagesSuite de Memoirenomenjanahary ruthPas encore d'évaluation
- Mémoire de Système de Contrôle D'accès SécuriséDocument59 pagesMémoire de Système de Contrôle D'accès SécuriséBrice SandjongPas encore d'évaluation
- tp1 Prise en Main ArduinoDocument4 pagestp1 Prise en Main Arduinomoussa dethie sarrPas encore d'évaluation
- FinallDocument56 pagesFinallRaphaëlPas encore d'évaluation
- Arduino Cours PDFDocument102 pagesArduino Cours PDFAdil AbouelhassanPas encore d'évaluation
- KacedGhania AoudiaDjamelDdineDocument60 pagesKacedGhania AoudiaDjamelDdineEman BchPas encore d'évaluation
- Rapport de PFE Une Pompe PhotovoltaïqueDocument44 pagesRapport de PFE Une Pompe PhotovoltaïqueAbdelkader Alkma100% (2)
- MINIPROJET MOTEUR PAS À PasDocument14 pagesMINIPROJET MOTEUR PAS À Passoraya ssouPas encore d'évaluation
- Catalogue - WeMos - 090154Document160 pagesCatalogue - WeMos - 090154ngollyjoachimPas encore d'évaluation
- Conception Et Realisation D Une Electrov PDFDocument4 pagesConception Et Realisation D Une Electrov PDFJawher SalemPas encore d'évaluation
- Arduino #30 - PWM de La Théorie À La Pratique Avec ArduinoDocument7 pagesArduino #30 - PWM de La Théorie À La Pratique Avec ArduinoRnav rnavPas encore d'évaluation
- Cours 2Document20 pagesCours 2Aziz JeghamPas encore d'évaluation