Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Cutting A GemDocument18 pagesCutting A Gemmobsivac100% (1)
- Introduction To Spectral Analysis Sm-Slides-1edDocument125 pagesIntroduction To Spectral Analysis Sm-Slides-1edICRRecercaPas encore d'évaluation
- Mat Lab ReviewDocument30 pagesMat Lab ReviewNarasimhan KumaraveluPas encore d'évaluation
- Matlab Finite Element Modeling For Materials Engineers Using MATLABDocument74 pagesMatlab Finite Element Modeling For Materials Engineers Using MATLABPujara ManishPas encore d'évaluation
- Multirate Filtering For DSPDocument414 pagesMultirate Filtering For DSPNarasimhan Kumaravelu67% (3)
- CcsDocument4 pagesCcsNarasimhan KumaraveluPas encore d'évaluation
- 12-Basic Principles DIPDocument4 pages12-Basic Principles DIPretheeshvkmPas encore d'évaluation
- Retinal Image AnalysisDocument5 pagesRetinal Image AnalysisNarasimhan KumaraveluPas encore d'évaluation
- Introduction To WaveletDocument26 pagesIntroduction To WaveletNarasimhan KumaraveluPas encore d'évaluation
- Mat Lab ReviewDocument30 pagesMat Lab ReviewNarasimhan KumaraveluPas encore d'évaluation
- Fundamentals of Hidden Markov ModelDocument34 pagesFundamentals of Hidden Markov ModelanupamaathreyasPas encore d'évaluation
- Image analysis techniques for biologyDocument52 pagesImage analysis techniques for biologySaurabh Malik100% (1)
- Wavelets and Subband CoddingDocument519 pagesWavelets and Subband Coddingtrungnt1981100% (2)
- An Introduction To Digital Image Processing With Matlab Notes For SCM2511 Image ProcessingDocument264 pagesAn Introduction To Digital Image Processing With Matlab Notes For SCM2511 Image ProcessingPedro PedPas encore d'évaluation
- Spectral Analysis TechniquesDocument10 pagesSpectral Analysis TechniquesRuth SilvaPas encore d'évaluation
- Wavelets and Subband CoddingDocument519 pagesWavelets and Subband Coddingtrungnt1981100% (2)
- Measurement & Calculation of Vehicle Center of Gravity Using Portable Wheel ScalesDocument11 pagesMeasurement & Calculation of Vehicle Center of Gravity Using Portable Wheel ScalesVedant KodagiPas encore d'évaluation
- Company Profile: How Aristagloves Became a Leader in Personal Protective EquipmentDocument16 pagesCompany Profile: How Aristagloves Became a Leader in Personal Protective EquipmentNissaaPas encore d'évaluation
- Bots and Automation Over Twitter During The U.S. Election: CompropDocument5 pagesBots and Automation Over Twitter During The U.S. Election: CompropRaninha MoraisPas encore d'évaluation
- ATS1801 - Interface PC - ImpDocument8 pagesATS1801 - Interface PC - ImpluismantonioPas encore d'évaluation
- Stoichiometry - Determination of Percent by Mass of NaHCO3 in Alka Seltzer TabletsDocument6 pagesStoichiometry - Determination of Percent by Mass of NaHCO3 in Alka Seltzer Tabletsgabbal009Pas encore d'évaluation
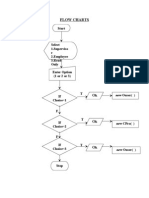
- Flow Charts Option: StartDocument13 pagesFlow Charts Option: StartbalabooksPas encore d'évaluation
- Flyer M 10id 12 ENDocument2 pagesFlyer M 10id 12 ENTrevor SalazarPas encore d'évaluation
- Cat 120H, 12H, 140H, 143H, 160H, 163H TransmisiónDocument8 pagesCat 120H, 12H, 140H, 143H, 160H, 163H TransmisiónJefferson Maldonado.Pas encore d'évaluation
- Extrusion-Spheronization Process Variables and CharacterizationDocument57 pagesExtrusion-Spheronization Process Variables and CharacterizationKhanh Le0% (1)
- 1.1 Testing of PPE For Eye and Face Protection FPDocument6 pages1.1 Testing of PPE For Eye and Face Protection FPWalter PossoPas encore d'évaluation
- Theory of Metal Cutting-Module 1Document116 pagesTheory of Metal Cutting-Module 1rejeesh_rajendranPas encore d'évaluation
- Oracle E-Business Suite Release 11i Upgrade To R12.1Document60 pagesOracle E-Business Suite Release 11i Upgrade To R12.1Vladimir PacotaipePas encore d'évaluation
- Especificaciones LuminariasDocument3 pagesEspecificaciones LuminariasRoni DominguezPas encore d'évaluation
- Lateral Earth Pressure TheoryDocument45 pagesLateral Earth Pressure TheoryAdel JamalPas encore d'évaluation
- multirab ura signaling issuesDocument1 pagemultirab ura signaling issuessha0% (1)
- QlassicDocument31 pagesQlassicQila HusinPas encore d'évaluation
- Wind Load CompututationsDocument31 pagesWind Load Compututationskim suarezPas encore d'évaluation
- Windmill ABB MachinesDocument6 pagesWindmill ABB MachinesRadu BabauPas encore d'évaluation
- Strategic Supply Chain Management and LogisticsDocument16 pagesStrategic Supply Chain Management and LogisticsNalaka Manawadu67% (3)
- The NT Insider: Writing Filters Is Hard WorkDocument32 pagesThe NT Insider: Writing Filters Is Hard WorkOveja NegraPas encore d'évaluation
- Custom Validation ExampleDocument4 pagesCustom Validation ExampleAbdul Bais StanikzaiPas encore d'évaluation
- Twice As Sharp Operators ManualDocument34 pagesTwice As Sharp Operators ManualLeonardo CHTZPas encore d'évaluation
- Goodyear Brochure Bandas-48Document1 pageGoodyear Brochure Bandas-48DavidPas encore d'évaluation
- Aerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityDocument4 pagesAerial Robotics Lecture 1B - 5 Agility and ManoeuvrabilityIain McCulloch100% (1)
- 07 AlarmManagement enDocument39 pages07 AlarmManagement enLuis RodriguezPas encore d'évaluation
- Sop Hydraulic Punch and ShearDocument1 pageSop Hydraulic Punch and ShearBorislav VulićPas encore d'évaluation
- Concrete Pipe Installation Guide-CPMDocument17 pagesConcrete Pipe Installation Guide-CPMSankar CdmPas encore d'évaluation
- CRCM Manual 2 9 16Document33 pagesCRCM Manual 2 9 16Kamagara Roland AndrewPas encore d'évaluation
- A ProcessDocument41 pagesA ProcessjulioPas encore d'évaluation