Vous aimerez peut-être aussi
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheD'EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Select Products: (Including Actuator Controller)Document16 pagesSelect Products: (Including Actuator Controller)Fady MichealPas encore d'évaluation
- PIC Design 2011 CatalogDocument292 pagesPIC Design 2011 CatalogElectromatePas encore d'évaluation
- Maxmill Fanuc Manual PDFDocument426 pagesMaxmill Fanuc Manual PDFRaul LupuPas encore d'évaluation
- 7200 EXM Monitor Installation, Operating, & Maintenance InstructionsDocument42 pages7200 EXM Monitor Installation, Operating, & Maintenance InstructionsIt. jinyiPas encore d'évaluation
- Boggies Toe Camber D11N - RDocument10 pagesBoggies Toe Camber D11N - Rdalforminas colombiaPas encore d'évaluation
- Windshield Wiper and Washer SystemsDocument22 pagesWindshield Wiper and Washer SystemsChristian MartinezPas encore d'évaluation
- YCM MVen - Ycm1314607540Document12 pagesYCM MVen - Ycm1314607540Abhishek VelagaPas encore d'évaluation
- Force CalcDocument12 pagesForce CalcSammy-papa Maropeng ShikaPas encore d'évaluation
- Kinetix 5700 Passive Shunt Modules: Installation InstructionsDocument8 pagesKinetix 5700 Passive Shunt Modules: Installation InstructionssenthilPas encore d'évaluation
- Prusa I3 Rework Rev1.5 - Assembly InstructionsDocument80 pagesPrusa I3 Rework Rev1.5 - Assembly InstructionsGabor LisakPas encore d'évaluation
- Hyt - Ypl-02Document8 pagesHyt - Ypl-02guna rx100Pas encore d'évaluation
- Accouplement Elastique N EUPEX MpvnoticeDocument10 pagesAccouplement Elastique N EUPEX MpvnoticesanatikalaPas encore d'évaluation
- M1. Multi Axis Servo System Using Step Motors and Motion Control PDFDocument37 pagesM1. Multi Axis Servo System Using Step Motors and Motion Control PDFTrân HồPas encore d'évaluation
- FDR Automated Stripping of Optical Fiber Ends 1Document54 pagesFDR Automated Stripping of Optical Fiber Ends 1api-616037163Pas encore d'évaluation
- Composite Automatic Wing Drilling Equipment (CAWDE) : Benjamen Hempstead, PE Brent Thayer Stephen WilliamsDocument8 pagesComposite Automatic Wing Drilling Equipment (CAWDE) : Benjamen Hempstead, PE Brent Thayer Stephen WilliamsRamona Cristina VarbanPas encore d'évaluation
- B (109 - 2000) Walking-Type Agricultural Tractor SpecificationsDocument6 pagesB (109 - 2000) Walking-Type Agricultural Tractor SpecificationsRustan Ace EstoestaPas encore d'évaluation
- D1 D19 (Vertex 33)Document19 pagesD1 D19 (Vertex 33)Giane NavasPas encore d'évaluation
- 100 007 528c - RotaryActuator215Document20 pages100 007 528c - RotaryActuator215Andrean SuryaPas encore d'évaluation
- PSA Series EngilshDocument66 pagesPSA Series EngilshTuấn NguyễnPas encore d'évaluation
- PAES 109 - Part 1 Pull-Type Walking-Type Agricultural TractorDocument6 pagesPAES 109 - Part 1 Pull-Type Walking-Type Agricultural TractorJerard BalalaPas encore d'évaluation
- Elliott, Uniflex ROG Design Manual - Rev D PDFDocument43 pagesElliott, Uniflex ROG Design Manual - Rev D PDFdhlinva3205Pas encore d'évaluation
- Steering SystemDocument22 pagesSteering SystemAlexanderPas encore d'évaluation
- FemaDocument43 pagesFemaVenkatesha HebbarPas encore d'évaluation
- Low Cost Automation For Manufacturing of Conveyor Chain BushesDocument6 pagesLow Cost Automation For Manufacturing of Conveyor Chain BushesRobinson PrabuPas encore d'évaluation
- Spherosyn and Microsyn Installation Manual PDFDocument19 pagesSpherosyn and Microsyn Installation Manual PDFkxkvi1274502Pas encore d'évaluation
- WC67-160 3200 Bending Machine From JIUYING LydiaDocument9 pagesWC67-160 3200 Bending Machine From JIUYING LydiaSantiago LeivaPas encore d'évaluation
- Slip Type ElevatorDocument15 pagesSlip Type ElevatorJohn Jairo Simanca100% (1)
- Series: High Performance High Rigidity Vertical Machining CenterDocument12 pagesSeries: High Performance High Rigidity Vertical Machining CenterAbhishek VelagaPas encore d'évaluation
- Radar : Implementation of Vision Based Target Tracking SystemDocument10 pagesRadar : Implementation of Vision Based Target Tracking SystemAli EbPas encore d'évaluation
- DownloadDocument28 pagesDownloadmoonstarPas encore d'évaluation
- Automated Drilling MachineDocument14 pagesAutomated Drilling MachineVardhan ChipperPas encore d'évaluation
- Component Description AlternatorDocument4 pagesComponent Description AlternatorElieloyPas encore d'évaluation
- Stepcraft CNC - QTN1 PDFDocument3 pagesStepcraft CNC - QTN1 PDFA SPas encore d'évaluation
- 2018 - UMC-1000 2016 - NewDocument16 pages2018 - UMC-1000 2016 - NewAbhishek VelagaPas encore d'évaluation
- OZAT SocketsDocument48 pagesOZAT SocketsZeckPas encore d'évaluation
- English 2001-09-05Document40 pagesEnglish 2001-09-05serdar aydınPas encore d'évaluation
- Hydraulic 4 Roller Rolling Machine W12-12x3000Document4 pagesHydraulic 4 Roller Rolling Machine W12-12x3000EnriqueMiguelPricePas encore d'évaluation
- Technical Specification For EP-12PN800 SZ Cabling MachineDocument6 pagesTechnical Specification For EP-12PN800 SZ Cabling Machinemehran khamsehzadehPas encore d'évaluation
- H834P062Document4 pagesH834P062awemetalPas encore d'évaluation
- Tsugami America M08SY IIDocument8 pagesTsugami America M08SY IIchinhtrungvttPas encore d'évaluation
- Track Roller Frame - Disassemble: Desarmado y ArmadoDocument8 pagesTrack Roller Frame - Disassemble: Desarmado y ArmadoPercy Herrera ZeballosPas encore d'évaluation
- Accurl Punching MachineDocument6 pagesAccurl Punching Machinenguyenthanhphong3614Pas encore d'évaluation
- Maintenance Manual: Rotary Valves RV-SDocument25 pagesMaintenance Manual: Rotary Valves RV-Saloknayak123Pas encore d'évaluation
- 4 Legged Multi Terrain RobotDocument15 pages4 Legged Multi Terrain RobotAyushPas encore d'évaluation
- VC 430 VC 510 EnglishDocument20 pagesVC 430 VC 510 EnglishValdair Jose De SouzaPas encore d'évaluation
- Erp VT Spec Sheet ViewDocument6 pagesErp VT Spec Sheet Viewkasparob25Pas encore d'évaluation
- Eumach - Umc - 5 Axis VMC Umc-1000Document16 pagesEumach - Umc - 5 Axis VMC Umc-1000Abhishek VelagaPas encore d'évaluation
- DTS 04 UkDocument12 pagesDTS 04 UkhepcomotionPas encore d'évaluation
- SainSmart Genmitsu CNC Router 3018-User ManualDocument26 pagesSainSmart Genmitsu CNC Router 3018-User ManualFernando MarcanoPas encore d'évaluation
- Frameless-Brushless Mounting en-USDocument6 pagesFrameless-Brushless Mounting en-USkv123Pas encore d'évaluation
- MV Series (MV66A-MV106A) - E-Catalogue - ENG - 2Document12 pagesMV Series (MV66A-MV106A) - E-Catalogue - ENG - 2Dhika PurnomoPas encore d'évaluation
- Design and Development of Mini Tractor Operated Installer and Retriever of Drip LineDocument12 pagesDesign and Development of Mini Tractor Operated Installer and Retriever of Drip Line01fe18bme033Pas encore d'évaluation
- Posicionador Automax Apex 5000Document2 pagesPosicionador Automax Apex 5000Edwing William Salhuana MendozaPas encore d'évaluation
- LT 7 TractorDocument4 pagesLT 7 Tractorgringo73234Pas encore d'évaluation
- High Performance Vertical Machining CenterDocument12 pagesHigh Performance Vertical Machining CenterAbhishek VelagaPas encore d'évaluation
- Sa227 Series: Lifting and Shoring - Description and OperationDocument4 pagesSa227 Series: Lifting and Shoring - Description and OperationRicardo zafraPas encore d'évaluation
- Service Manual MS4 (2020 - 08 - 20 02 - 50 - 44 UTC)Document92 pagesService Manual MS4 (2020 - 08 - 20 02 - 50 - 44 UTC)Arnoldo Felix100% (1)
- Axis Servo System Using LabviewDocument47 pagesAxis Servo System Using LabviewNguyenCanhBaoPas encore d'évaluation
- PDF 20230427 193211 0000-1 PDFDocument5 pagesPDF 20230427 193211 0000-1 PDFReginald AgcambotPas encore d'évaluation
- Velo 3D - PB-Sapphire-v1 - 05-Release-WebDocument2 pagesVelo 3D - PB-Sapphire-v1 - 05-Release-Webravichandran0506Pas encore d'évaluation
- Captiva Ecm 2.4 LDocument35 pagesCaptiva Ecm 2.4 L8196850% (2)
- DLM382 DLM432: en SV No Fi LV LT Et RuDocument80 pagesDLM382 DLM432: en SV No Fi LV LT Et RuAivaras SaniukasPas encore d'évaluation
- Equipment Installation Verification Procedure:: How To Use This DocumentDocument3 pagesEquipment Installation Verification Procedure:: How To Use This DocumentBasha Yazn AnjakPas encore d'évaluation
- Work Shop Manual: 15 LD 225 15 LD 315 15 LD 350 15 LD 400 15 LD 440Document74 pagesWork Shop Manual: 15 LD 225 15 LD 315 15 LD 350 15 LD 400 15 LD 440Rolandas PetkusPas encore d'évaluation
- Sr. Devops Engineer Job SampleDocument2 pagesSr. Devops Engineer Job SampleSannithiBalajiPas encore d'évaluation
- Entrepreneurship: Module 1-Common and Core Competencies in EntrepreneurshipDocument12 pagesEntrepreneurship: Module 1-Common and Core Competencies in EntrepreneurshipMylene CandidoPas encore d'évaluation
- Service Delivery Manager Resume SampleDocument3 pagesService Delivery Manager Resume SampleManish KumarPas encore d'évaluation
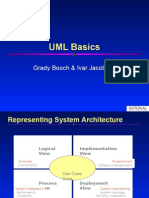
- UML Basics: Grady Booch & Ivar JacobsonDocument101 pagesUML Basics: Grady Booch & Ivar Jacobsongunasekaran.subramani3879100% (1)
- Humidity Ebook 2017 B211616ENDocument17 pagesHumidity Ebook 2017 B211616ENgustavohdez2Pas encore d'évaluation
- Verona Medical Group - DENT-X EVA 2010Document4 pagesVerona Medical Group - DENT-X EVA 2010VeronaMedicalGroupYYPas encore d'évaluation
- FC F325iT Manufacturing-System Oct2022.aspxDocument1 pageFC F325iT Manufacturing-System Oct2022.aspxKantishPas encore d'évaluation
- Connected Nations 2020Document62 pagesConnected Nations 2020Irina SilesPas encore d'évaluation
- Design of Low Power Sram Cell With Improved Stability: Javed Akhtar AnsariDocument54 pagesDesign of Low Power Sram Cell With Improved Stability: Javed Akhtar AnsariSunil KumarPas encore d'évaluation
- VP Operations Job DescriptionDocument2 pagesVP Operations Job DescriptionAmol Ghemud100% (1)
- B10 Ignition System: To IndexDocument7 pagesB10 Ignition System: To Indexwei fooPas encore d'évaluation
- Huawei GSM Network Energy Saving Solution (For Technical)Document17 pagesHuawei GSM Network Energy Saving Solution (For Technical)c2poyraz100% (2)
- Fabric Data WarehouseDocument280 pagesFabric Data WarehouseOmarPas encore d'évaluation
- TSD MTD WM MTD Production RF Receiving AbapDocument52 pagesTSD MTD WM MTD Production RF Receiving AbapsourishPas encore d'évaluation
- Manish SeminarDocument13 pagesManish SeminarIshu RajPas encore d'évaluation
- MS Word 2. ExcelDocument13 pagesMS Word 2. ExcelKunjal PalPas encore d'évaluation
- JobsPortal GuideDocument10 pagesJobsPortal GuideMurufa WilliamPas encore d'évaluation
- Select Business and Technology CollegeDocument1 pageSelect Business and Technology CollegePink WorkuPas encore d'évaluation
- Physics Cl10 Assign16Document2 pagesPhysics Cl10 Assign16Tapas Banerjee100% (1)
- Amazon - de Android TV BoxDocument1 pageAmazon - de Android TV BoxMirelaBurgic-SalihovicPas encore d'évaluation
- Masterpieces of Piano MusicDocument562 pagesMasterpieces of Piano Musichtrung2101100% (1)
- Manual de Partes JCB JS200L PDFDocument99 pagesManual de Partes JCB JS200L PDFAdolfo Martinez89% (18)
- Republic of The Philippines Quezon City Branch: T C 1 P U"Document8 pagesRepublic of The Philippines Quezon City Branch: T C 1 P U"Kim john defiestaPas encore d'évaluation
- Max 15.0V at 12V Max 31.5V at 24V Max 61.0V at 48V: Main FeaturesDocument1 pageMax 15.0V at 12V Max 31.5V at 24V Max 61.0V at 48V: Main FeaturesJoebany SabotePas encore d'évaluation