Vous aimerez peut-être aussi
- TP Physique - TS-Chute Parabolique-2Document3 pagesTP Physique - TS-Chute Parabolique-2amine milano0% (1)
- Exerc 2Document3 pagesExerc 2gamal100% (1)
- Exercice Corrige ElectrocinetiqueDocument7 pagesExercice Corrige ElectrocinetiqueOthmane Elmouatamid80% (10)
- Exercice No 2 CorrigéDocument2 pagesExercice No 2 CorrigéHiippy PeacawiiPas encore d'évaluation
- Exercice No 1 Corrigé PDFDocument6 pagesExercice No 1 Corrigé PDFamine milanoPas encore d'évaluation
- ElectricitéDocument8 pagesElectricitéHerve DerouleauxPas encore d'évaluation
- Exercice Corrige Electrocinetique - NortonDocument7 pagesExercice Corrige Electrocinetique - Nortonamine milanoPas encore d'évaluation
- Exercice No 4 CorrigéDocument2 pagesExercice No 4 Corrigéamine milanoPas encore d'évaluation
- Exercice No 9 CorrigéDocument2 pagesExercice No 9 Corrigéamine milanoPas encore d'évaluation
- Electrique PDFDocument1 pageElectrique PDFyfuyyPas encore d'évaluation
- Une SL Exo Thevenin3-CopieDocument2 pagesUne SL Exo Thevenin3-Copiemouniax3Pas encore d'évaluation
- Exercice No 8 CorrigéDocument2 pagesExercice No 8 Corrigéamine milanoPas encore d'évaluation
- Exercice No 4 CorrigéDocument2 pagesExercice No 4 Corrigéamine milanoPas encore d'évaluation
- Exercice No 6 CorrigéDocument3 pagesExercice No 6 Corrigéamine milanoPas encore d'évaluation
- ReseauDocument8 pagesReseaupaulPas encore d'évaluation
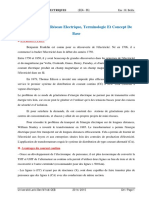
- CHAP1 - Présentation Du Réseau Electrique, Terminologie Et Concept de BaseDocument8 pagesCHAP1 - Présentation Du Réseau Electrique, Terminologie Et Concept de BaseBtissamBettyPas encore d'évaluation
- Exercice No 10 Corrigé PDFDocument5 pagesExercice No 10 Corrigé PDFamine milanoPas encore d'évaluation
- Exercice No 7 Corrigé PDFDocument3 pagesExercice No 7 Corrigé PDFamine milanoPas encore d'évaluation
- Exos MCCDocument11 pagesExos MCCAdnane R'z100% (1)
- Test 2Document2 pagesTest 2amine milanoPas encore d'évaluation
- Série de TD N°:02: Exercice 01Document3 pagesSérie de TD N°:02: Exercice 01amine milanoPas encore d'évaluation
- Exercice Machines AsynchronesDocument10 pagesExercice Machines Asynchronesfouad100% (5)
- TD Commande de Machines Serie 3 Machines SynchronesDocument3 pagesTD Commande de Machines Serie 3 Machines Synchronesamine milanoPas encore d'évaluation
- Circuit RLC: T.P InstrumentationDocument9 pagesCircuit RLC: T.P Instrumentationamine milanoPas encore d'évaluation
- Geii Marseille Annales-Ds-Circuits Magnetiques 2 PDFDocument12 pagesGeii Marseille Annales-Ds-Circuits Magnetiques 2 PDFamine milano100% (2)
- TP3 - 601Document2 pagesTP3 - 601amine milanoPas encore d'évaluation
- Exos Machine SynchroneDocument14 pagesExos Machine SynchroneIkram Ikram100% (3)
- Compte Rendu Et Interprétation Des RésultatsDocument6 pagesCompte Rendu Et Interprétation Des Résultatsamine milanoPas encore d'évaluation
- Exos MCCDocument11 pagesExos MCCAdnane R'z100% (1)
- Série 2 Automatisme Avec CorrigéDocument11 pagesSérie 2 Automatisme Avec Corrigéamine milano100% (2)
- TP OptoelectroniqueDocument12 pagesTP Optoelectroniqueabderrazek righiPas encore d'évaluation
- TP M2 308 1 VRM 3 Voies PSIM 2016Document3 pagesTP M2 308 1 VRM 3 Voies PSIM 2016Youssef YoussefPas encore d'évaluation
- 2022 Yamaha Accessoire MarineDocument102 pages2022 Yamaha Accessoire MarineLeo PUGNAIREPas encore d'évaluation
- Haute TensionDocument149 pagesHaute TensionRamdane RamdanoPas encore d'évaluation
- UntitledDocument4 pagesUntitledBenjemaa KawtherPas encore d'évaluation
- Electricite Ma Moto MZDocument5 pagesElectricite Ma Moto MZIssa MoussaPas encore d'évaluation
- ESSAHLI1Document66 pagesESSAHLI1ErnestPas encore d'évaluation
- Les Conducteurs Et Les Isolants Exercices Non Corriges 7Document2 pagesLes Conducteurs Et Les Isolants Exercices Non Corriges 7Kamal DAOUDI100% (1)
- Physique TCDocument89 pagesPhysique TCEusèbePas encore d'évaluation
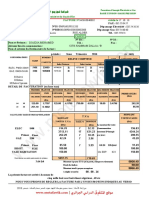
- 01 - Motafawik.com - فاتورة الكهرباء والغاز بالجزائر ـ نموذج 2016Document15 pages01 - Motafawik.com - فاتورة الكهرباء والغاز بالجزائر ـ نموذج 2016Ma AiPas encore d'évaluation
- Guide Photovoltaique in Sun We Trust 2020 Trimestre 2Document44 pagesGuide Photovoltaique in Sun We Trust 2020 Trimestre 2attiori fabricePas encore d'évaluation
- Les Capteurs de Déplacements VERSION 1Document8 pagesLes Capteurs de Déplacements VERSION 1Oudjoud KeddourPas encore d'évaluation
- Corrigé Théorie 10 STE A2019Document23 pagesCorrigé Théorie 10 STE A2019GurlInpinkPas encore d'évaluation
- Sujet C6Document39 pagesSujet C6Md AhmedPas encore d'évaluation
- Correction Epreuve de Chimie Des Electrolytes 2013 2014Document5 pagesCorrection Epreuve de Chimie Des Electrolytes 2013 2014Abdelhakim BailalPas encore d'évaluation
- L Electricite de La Centrale A La MaisonDocument52 pagesL Electricite de La Centrale A La MaisonClayssaNel0% (1)
- Caj 9510TDocument2 pagesCaj 9510TAndres VargazPas encore d'évaluation
- ST One #T61-P61 PDFDocument12 pagesST One #T61-P61 PDFMohamedAliOuhaddouPas encore d'évaluation
- d31 Formation Chaine de Traction PDFDocument152 pagesd31 Formation Chaine de Traction PDFzizouhiche100% (1)
- Refroidissement Des TransformateursDocument3 pagesRefroidissement Des TransformateursSmail YacoubPas encore d'évaluation
- Chapitre 4Document16 pagesChapitre 4semchaachraf94Pas encore d'évaluation
- Champ Magnétiques Dans Les Machine Électrique.: Présente ParDocument10 pagesChamp Magnétiques Dans Les Machine Électrique.: Présente ParBį BįčhøūPas encore d'évaluation
- SONAFI SarlDocument12 pagesSONAFI SarlHafiani HichamPas encore d'évaluation
- Hitachi Plasma 42pd7200a PDFDocument75 pagesHitachi Plasma 42pd7200a PDFdann222Pas encore d'évaluation
- Traitement de Signal - SIMULATION NUMERIQUE ET REALISATION DU CRYPTAGE DU SONDocument24 pagesTraitement de Signal - SIMULATION NUMERIQUE ET REALISATION DU CRYPTAGE DU SONADC-Tutorial 0.1Pas encore d'évaluation
- SiantouDocument2 pagesSiantouGino JiokouPas encore d'évaluation
- CR-TP E2 Transitoire-RcDocument2 pagesCR-TP E2 Transitoire-RcphylokemitPas encore d'évaluation
- 5G3Electricite PDFDocument162 pages5G3Electricite PDFDadati Sou100% (1)
- Modulation D Amplitude Cours 1 1Document4 pagesModulation D Amplitude Cours 1 19ahwa ZahraPas encore d'évaluation