Vous aimerez peut-être aussi
- Robotique S3 2020 EtDocument303 pagesRobotique S3 2020 EtIlyas khadrouniPas encore d'évaluation
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- Chapitre I Systèmes Mécanique Articulés Et Robotique Introduction - Boutaani 2020Document60 pagesChapitre I Systèmes Mécanique Articulés Et Robotique Introduction - Boutaani 2020billy ben100% (1)
- 13 9 TD - Transmission PDFDocument10 pages13 9 TD - Transmission PDFRanya ouherrouPas encore d'évaluation
- 3 0 Systèmes Mécaniques Articulés Et RobotiqueDocument100 pages3 0 Systèmes Mécaniques Articulés Et RobotiqueredaPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- Chapitre 3 - Schema Cinematique - 1er STDocument25 pagesChapitre 3 - Schema Cinematique - 1er STYДSSДMiNЭ NДRCISSЭ100% (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Cours Robotique Intéressant PDFDocument143 pagesCours Robotique Intéressant PDFokacha0amraouy100% (1)
- EFM M21 +CORRIGEZ 2013cDocument6 pagesEFM M21 +CORRIGEZ 2013cait ijja100% (1)
- Bras ManipulateurDocument12 pagesBras ManipulateurLiebherrPas encore d'évaluation
- La Théorie Des MécanismesDocument13 pagesLa Théorie Des MécanismesMohamed Ali ElouaerPas encore d'évaluation
- Thème 1 - Poulie Redex-1Document1 pageThème 1 - Poulie Redex-1Anime forever 20160% (1)
- TP Delmia Esstin V5Document40 pagesTP Delmia Esstin V5Sergio Angarita SPas encore d'évaluation
- Résumé TransmettreDocument18 pagesRésumé TransmettreMehdi Ben Zouine100% (3)
- Support de Cours RobotiqueDocument36 pagesSupport de Cours RobotiqueMariem Trojette100% (1)
- Exercice Robotique PDFDocument2 pagesExercice Robotique PDFRobert75% (4)
- COMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Document16 pagesCOMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Salma Rekik100% (1)
- Exam Gemma Emsi 07Document3 pagesExam Gemma Emsi 07Mark ParaPas encore d'évaluation
- TP Robotique SALEH ShawkiDocument20 pagesTP Robotique SALEH ShawkiIlyas khadrouniPas encore d'évaluation
- Méthodologie Et Règles de La Conception Des Systèmes MécaniquesDocument7 pagesMéthodologie Et Règles de La Conception Des Systèmes Mécaniquesnafaa_ali1375100% (1)
- Licence - Construction MécaniqueDocument91 pagesLicence - Construction MécaniqueLoujeine JouriPas encore d'évaluation
- Bras - Robot C-9895-ConvertiDocument18 pagesBras - Robot C-9895-ConvertiTalel TliliPas encore d'évaluation
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaPas encore d'évaluation
- Sujet1 Robotique AitlahcenDocument4 pagesSujet1 Robotique AitlahcenCaptain Teddy BearPas encore d'évaluation
- c7 Chap1Document12 pagesc7 Chap1Alioune Badara MbodjPas encore d'évaluation
- Utt - Rapport Ma13 - Abaqus PDFDocument19 pagesUtt - Rapport Ma13 - Abaqus PDFLeksir KamiliaPas encore d'évaluation
- TP1Document23 pagesTP1AichaELJafoufi100% (1)
- Cours RobotiqueDocument82 pagesCours RobotiqueWided Maghraoui100% (1)
- Conception Train D'atterrissageDocument49 pagesConception Train D'atterrissageKaoutar BouqdirPas encore d'évaluation
- Fascicule de TP CAO FAO MécaniqueDocument47 pagesFascicule de TP CAO FAO MécaniqueGadaHaddad100% (1)
- Theorie Des Mecanismes MisDocument42 pagesTheorie Des Mecanismes MisSemlali Zakaria100% (2)
- Livret CATIA V5Document56 pagesLivret CATIA V5EL-AARBAOUI ABDELJALILPas encore d'évaluation
- 4-Les FreinsDocument13 pages4-Les FreinsChokri AtefPas encore d'évaluation
- Modélisation GéométriqueDocument15 pagesModélisation GéométriqueNidal BestPas encore d'évaluation
- Corrige Examen TM 2018Document5 pagesCorrige Examen TM 2018FAWZI RONALDOPas encore d'évaluation
- TD PolytechDocument9 pagesTD Polytechlahssane hmidatPas encore d'évaluation
- Rapport Mécatronique Mini ProjetDocument9 pagesRapport Mécatronique Mini ProjetAyoub Bahtat0% (1)
- Calcul ClavetteDocument5 pagesCalcul ClavetteHamza Liberados100% (1)
- (Tec) (TD) Dimensionnement de RoulementsDocument4 pages(Tec) (TD) Dimensionnement de RoulementsBouba Rabeb100% (2)
- Accouplement CoursDocument8 pagesAccouplement CoursPROFDEMECA100% (2)
- Système Vis-Écrou: Projet Professionnel de L'etudiantDocument32 pagesSystème Vis-Écrou: Projet Professionnel de L'etudiantellouze islemPas encore d'évaluation
- Guidage en Rotation Par Roulements (BT Et KB)Document6 pagesGuidage en Rotation Par Roulements (BT Et KB)MIMFS67% (12)
- PROJET Bras RobotiseDocument26 pagesPROJET Bras RobotiseFAROK businessPas encore d'évaluation
- Cours RessortsDocument43 pagesCours RessortsYounessElkarkouri100% (1)
- Embrayage Frein Et ReducteurDocument7 pagesEmbrayage Frein Et ReducteurOtman OtoPas encore d'évaluation
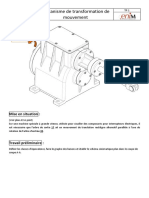
- Sujet - Mécanisme de Transformation de MouvementDocument2 pagesSujet - Mécanisme de Transformation de Mouvementhaziq ridzuanPas encore d'évaluation
- Corr TD 2 Theorie de Mecanisme PDFDocument3 pagesCorr TD 2 Theorie de Mecanisme PDFMélèk BejiPas encore d'évaluation
- Rapport Fin D'etudeDocument75 pagesRapport Fin D'etudehamza gaceurPas encore d'évaluation
- Microsoft Word - Rapport Mini CNC A 3 Axes Fini Finalll FinaaaaaaaaaaaaaaaaaaaalDocument38 pagesMicrosoft Word - Rapport Mini CNC A 3 Axes Fini Finalll FinaaaaaaaaaaaaaaaaaaaalMaher Bwz82% (11)
- Cours RobotiqueDocument78 pagesCours RobotiqueImane LamnouarPas encore d'évaluation
- Rapport de StageDocument28 pagesRapport de StageAziz SaidiPas encore d'évaluation
- Pendule InverséDocument20 pagesPendule InverséTECH NEWSPas encore d'évaluation
- Formation CATIAV5 CeCDocument405 pagesFormation CATIAV5 CeCAdima Said100% (1)
- TD 2 - 2021Document2 pagesTD 2 - 2021hiba gribaPas encore d'évaluation
- Ch3 - Modélisation Géométrique Des RobotsDocument9 pagesCh3 - Modélisation Géométrique Des RobotsBày RémPas encore d'évaluation
- Orca Share Media1671134389143 7009245652922088811Document50 pagesOrca Share Media1671134389143 7009245652922088811Nodjoud KhawelaPas encore d'évaluation
- 12 - Modélisation Cinématique Des MécanismesDocument25 pages12 - Modélisation Cinématique Des MécanismesManal El Matmour M'hairPas encore d'évaluation
- Chapitre 1 - Définitions Et TerminologiesDocument16 pagesChapitre 1 - Définitions Et Terminologiesabdousewager8080Pas encore d'évaluation
- Cour Robotique IndustrielleDocument22 pagesCour Robotique IndustriellekarimaPas encore d'évaluation
- 5-Exemples - Bete A Corne Et PieuvrefichierDocument3 pages5-Exemples - Bete A Corne Et Pieuvrefichierbilly benPas encore d'évaluation
- Chapitre III Systèmes Mécanique Articulés Et Robotique - Transformations Homogènes - Boutaani 2020 PDFDocument62 pagesChapitre III Systèmes Mécanique Articulés Et Robotique - Transformations Homogènes - Boutaani 2020 PDFbilly benPas encore d'évaluation
- Chapitre II Systèmes Mécanique Articulés Et Robotique - Modélisation Dun Robot - Boutaani 2020 PDFDocument58 pagesChapitre II Systèmes Mécanique Articulés Et Robotique - Modélisation Dun Robot - Boutaani 2020 PDFbilly ben100% (3)
- Chapitre III Systèmes Mécanique Articulés Et Robotique - Transformations Homogènes - Boutaani 2020 PDFDocument62 pagesChapitre III Systèmes Mécanique Articulés Et Robotique - Transformations Homogènes - Boutaani 2020 PDFbilly benPas encore d'évaluation
- Programmation LinèaireDocument17 pagesProgrammation Linèairebilly benPas encore d'évaluation
- MaintenanceDocument9 pagesMaintenancebilly ben100% (1)
- Best Practices VOIP VGDocument17 pagesBest Practices VOIP VGStéphane GuézouPas encore d'évaluation
- CV Auto EvaluationDocument11 pagesCV Auto EvaluationAlexandra Sascha Badila SterckPas encore d'évaluation
- TABE Minco Maquinarias ChileDocument13 pagesTABE Minco Maquinarias ChileNelson Andrade VelasquezPas encore d'évaluation
- C. Difficile Clostridium Difficile: Glossaire - Technique Radiologique AcronymesDocument3 pagesC. Difficile Clostridium Difficile: Glossaire - Technique Radiologique AcronymesSlim MâamerPas encore d'évaluation
- Fiche Evaluation À ChaudDocument2 pagesFiche Evaluation À Chaudqualite consultingPas encore d'évaluation
- Support de Cours Et T.D. Reseaux DaccesDocument45 pagesSupport de Cours Et T.D. Reseaux DaccesDAP creatPas encore d'évaluation
- Cours Architecture IOT 3Document17 pagesCours Architecture IOT 3Sourour JellaliPas encore d'évaluation
- FR DBMOTEURS Volvo Penta PDFDocument102 pagesFR DBMOTEURS Volvo Penta PDFHøc ÎnęPas encore d'évaluation
- Devoir WordDocument10 pagesDevoir WordJonathan FrédéricPas encore d'évaluation
- 612ba5755f98btransmission Bts Blanc 2017 Filiere Reseau InformaDocument2 pages612ba5755f98btransmission Bts Blanc 2017 Filiere Reseau InformaUlrich JordanPas encore d'évaluation
- Processus D'extraction D'huile de GrignonsDocument3 pagesProcessus D'extraction D'huile de Grignonsouzeouze123Pas encore d'évaluation
- Reception Chantier Step Skhor Rhamna V01Document20 pagesReception Chantier Step Skhor Rhamna V01Noureddine ait el hajPas encore d'évaluation
- HS72 HS74 HS76Document28 pagesHS72 HS74 HS76François EstradePas encore d'évaluation
- Fiche D'Inscription Pedagogique 2022-2023: Identification FormationDocument2 pagesFiche D'Inscription Pedagogique 2022-2023: Identification FormationDokrissa KAMINAPas encore d'évaluation
- Qualité 4.0Document146 pagesQualité 4.0trabelsiPas encore d'évaluation
- Angular-Chapitre1-Intro Dev WebDocument32 pagesAngular-Chapitre1-Intro Dev WebChiheb MezriguiPas encore d'évaluation
- Repair Manual d7f EngineDocument46 pagesRepair Manual d7f EnginePedroPas encore d'évaluation
- Application Informatique Pour Le Calcul Du Temps Et Coût D'usinage Des Pièces en Fraisage Et en TournageDocument82 pagesApplication Informatique Pour Le Calcul Du Temps Et Coût D'usinage Des Pièces en Fraisage Et en TournageppePas encore d'évaluation
- Notions D'oracleDocument53 pagesNotions D'oracleTIEHO LEOUAPas encore d'évaluation
- TP MbakidiDocument10 pagesTP Mbakidifrancis luminguPas encore d'évaluation
- compte rendu - نسخةDocument4 pagescompte rendu - نسخةyoucefPas encore d'évaluation
- PLAN DE MAINTENANCE PREVENTIVE ModéleDocument8 pagesPLAN DE MAINTENANCE PREVENTIVE ModéleGhaith Soudani100% (3)
- Cours S5 Chap1Document88 pagesCours S5 Chap1Boutouil HassanPas encore d'évaluation
- Rapport Steg ZarzisDocument18 pagesRapport Steg ZarzisŠärâh Ğhērŕî100% (1)
- Sbec22525210frr0 1Document25 pagesSbec22525210frr0 1BrotherPas encore d'évaluation
- Série 3Document4 pagesSérie 3Zain GaradiPas encore d'évaluation
- H-300B-20-47664 (8.0) HYPERVISOR VI Operation Manual (French)Document218 pagesH-300B-20-47664 (8.0) HYPERVISOR VI Operation Manual (French)omar valdiviaPas encore d'évaluation
- UntitledDocument69 pagesUntitledRégis ESCOBARPas encore d'évaluation
- Programmation PlanDocument10 pagesProgrammation PlanVazgen MarkaryanPas encore d'évaluation
- Résolution de TriangleDocument3 pagesRésolution de TriangleHaifaHaifaPas encore d'évaluation