Vous aimerez peut-être aussi
- L'Air InstrumentDocument46 pagesL'Air Instrumentanis100% (5)
- Mecanique Du SolideDocument129 pagesMecanique Du SolideSîdïMôhâmèdBën100% (1)
- Exercices Mecanique GeneraleDocument295 pagesExercices Mecanique GeneraleSalah-eddine ZitiPas encore d'évaluation
- Dix Indicateurs de Base Pour Maîtriser La Maintenance Industrielle - M. Yves LAVINA (ProConseil) - 19-09-2007Document12 pagesDix Indicateurs de Base Pour Maîtriser La Maintenance Industrielle - M. Yves LAVINA (ProConseil) - 19-09-2007LABAZAUTOMATION1Pas encore d'évaluation
- Mécanique Du SolideDocument61 pagesMécanique Du SolideZinelabedine OulimePas encore d'évaluation
- Maintenance Professionnel Fiabilisation Des ÉquipementsDocument137 pagesMaintenance Professionnel Fiabilisation Des ÉquipementsCherki ONkPas encore d'évaluation
- REDUCTEUR DE VITESSE MEMOIRE CorrigéDocument78 pagesREDUCTEUR DE VITESSE MEMOIRE CorrigéJeremie Ivann NGOYEPas encore d'évaluation
- Revisions MecaniquesDocument6 pagesRevisions MecaniquesAbdelali YacoubiPas encore d'évaluation
- Schema Electrique Volvo B12MDocument224 pagesSchema Electrique Volvo B12MMohammed Yassine Garreb100% (5)
- Corr SUP TD CIN PSDocument2 pagesCorr SUP TD CIN PSSafae SabirPas encore d'évaluation
- Guide D'élaboration D'un Projet de Fin D'etudesDocument15 pagesGuide D'élaboration D'un Projet de Fin D'etudesYoussef KhaliPas encore d'évaluation
- Résumé Global Du Cours de Sciences de L'ingénieurDocument30 pagesRésumé Global Du Cours de Sciences de L'ingénieuralbertocontador54% (13)
- Compte Rendu TP Mesure de TempératureDocument13 pagesCompte Rendu TP Mesure de Températurekhalfallah hamzaPas encore d'évaluation
- Chap02 - Modèle Géométrique Direct PDFDocument19 pagesChap02 - Modèle Géométrique Direct PDFBadr Kaakoua100% (2)
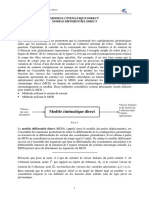
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamPas encore d'évaluation
- Verin Melangeur CorrigeDocument4 pagesVerin Melangeur CorrigeahmedguerinPas encore d'évaluation
- Manuel Atelier TmaxDocument410 pagesManuel Atelier TmaxGuillaume PacauxPas encore d'évaluation
- Norme Européenne: NF EN 378-1Document54 pagesNorme Européenne: NF EN 378-1PROXITECH0% (1)
- Cineamtique Torseur CinematiqueDocument12 pagesCineamtique Torseur CinematiqueDouae OGPas encore d'évaluation
- Fiche Revisions MecaDocument12 pagesFiche Revisions MecakajtiPas encore d'évaluation
- TP MG 3Document3 pagesTP MG 3LAALAIFAICELPas encore d'évaluation
- Chap3 Cinematique Du Solide OkDocument16 pagesChap3 Cinematique Du Solide OkmatozoPas encore d'évaluation
- Cinématique Des Solides Formulaire MP PSI TSI RS Sept 2021Document11 pagesCinématique Des Solides Formulaire MP PSI TSI RS Sept 2021Douas MohamedPas encore d'évaluation
- TD Cinematique CHARIOT FILOGUIDE PDFDocument4 pagesTD Cinematique CHARIOT FILOGUIDE PDFanassPas encore d'évaluation
- Cinematique CoursDocument3 pagesCinematique Courswelvye 1Pas encore d'évaluation
- Has203 Has204 Cinematique Moteur - CompletDocument32 pagesHas203 Has204 Cinematique Moteur - CompletZeleph ComboPas encore d'évaluation
- DS Mécanique S.N 21-23Document9 pagesDS Mécanique S.N 21-23cool clipsPas encore d'évaluation
- 010 S 07 01 Eval StatiqueDocument2 pages010 S 07 01 Eval StatiquesedmorabetPas encore d'évaluation
- Lois Frottement Solide FinalDocument27 pagesLois Frottement Solide FinalpirjgfeiorPas encore d'évaluation
- Cours 13Document8 pagesCours 13BalalaŇaŖîfPas encore d'évaluation
- Chapitre 3: Rappels de Cinématique Du Solide: 1 Points Liés À Un SolideDocument6 pagesChapitre 3: Rappels de Cinématique Du Solide: 1 Points Liés À Un SolidesimoPas encore d'évaluation
- Meca Solide Projection Chapitre2Document49 pagesMeca Solide Projection Chapitre2Elio RiachiPas encore d'évaluation
- GM DS8-2014 CorrigeDocument4 pagesGM DS8-2014 CorrigeYassine BouchattaPas encore d'évaluation
- Chap. II Modélisation de La Machine Asynchrone TriphaséDocument8 pagesChap. II Modélisation de La Machine Asynchrone TriphaséElysee Mukanya mwanabutePas encore d'évaluation
- Prã©paration Concours 2020 Cinã©matique Des Solides FormulaireDocument12 pagesPrã©paration Concours 2020 Cinã©matique Des Solides FormulaireNowe AhmadePas encore d'évaluation
- CINÉMATIQUE Du Solide 2022 - 2023Document20 pagesCINÉMATIQUE Du Solide 2022 - 2023Chhin HoutPas encore d'évaluation
- 95 Resume Meca 2019Document6 pages95 Resume Meca 2019Hicham ZghariPas encore d'évaluation
- 111 1 9 Cinematique GraphiqueDocument10 pages111 1 9 Cinematique GraphiqueCherki ONkPas encore d'évaluation
- Resume MecaniqueDocument6 pagesResume MecaniqueAdamPas encore d'évaluation
- Ecriture Du Torseur Cinematique PDFDocument15 pagesEcriture Du Torseur Cinematique PDFapi34Pas encore d'évaluation
- DS3. 1 - EQUILIBREUSE DE ROUE Le Schéma Cinématique D'une Équilibreuse de Roue de Véhicule Est Donné Ci-Dessous. X, y ZDocument14 pagesDS3. 1 - EQUILIBREUSE DE ROUE Le Schéma Cinématique D'une Équilibreuse de Roue de Véhicule Est Donné Ci-Dessous. X, y ZMecprtAna100% (1)
- CHAP 4b CINEMATIQUE 2018-2019 (Prof)Document5 pagesCHAP 4b CINEMATIQUE 2018-2019 (Prof)gerard correaPas encore d'évaluation
- Cinématique 2022Document51 pagesCinématique 2022said houmairiPas encore d'évaluation
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Resumé Ouikassi ADocument30 pagesResumé Ouikassi AkamalPas encore d'évaluation
- TP01 ELN1 Template 2021-2022Document6 pagesTP01 ELN1 Template 2021-2022Ahmed Be yahakemPas encore d'évaluation
- SujetsCachanDocument48 pagesSujetsCachanetalieezechielPas encore d'évaluation
- Examen 2019Document2 pagesExamen 2019Hamza MhalPas encore d'évaluation
- Résumé SII 2015 PDFDocument28 pagesRésumé SII 2015 PDFKhawla El HamdaouiPas encore d'évaluation
- Vidal Agniel - Rapport de Mémoire de M2Document36 pagesVidal Agniel - Rapport de Mémoire de M2fouedabdellaoui2020Pas encore d'évaluation
- Chap2 Cinématique SolideDocument31 pagesChap2 Cinématique SolidekhadijaPas encore d'évaluation
- Série N° 2 MSI - Cinématique I: Exercice 2Document3 pagesSérie N° 2 MSI - Cinématique I: Exercice 2mezziPas encore d'évaluation
- 138 Ds Mpsi Et Pcsi CinematiqueDocument10 pages138 Ds Mpsi Et Pcsi CinematiqueFaical BharPas encore d'évaluation
- ch3 CCompositionMvt2010Document22 pagesch3 CCompositionMvt2010kimPas encore d'évaluation
- 01 Dynamique Des SolidesDocument14 pages01 Dynamique Des SolidesIheb KarimPas encore d'évaluation
- Torseur Cinématique - WikipédiaDocument18 pagesTorseur Cinématique - Wikipédiagabrielmaheshe039Pas encore d'évaluation
- Cours Commande MASDocument28 pagesCours Commande MASChristo RouynPas encore d'évaluation
- Chap 2Document16 pagesChap 2ZA CBPas encore d'évaluation
- tp2 Fluent PDFDocument6 pagestp2 Fluent PDFihaPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2yousfi jeziaPas encore d'évaluation
- Le Calcul de Roulements by FEM With CatiaDocument12 pagesLe Calcul de Roulements by FEM With CatiaJohn JohnPas encore d'évaluation
- Révisions Et CinétiqueDocument47 pagesRévisions Et CinétiqueAdamPas encore d'évaluation
- Chapitre2 TD OscillateursDocument4 pagesChapitre2 TD OscillateursFatima EzzahraPas encore d'évaluation
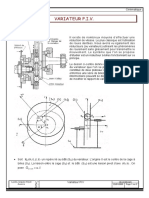
- Cisvariateurpiv PDFDocument2 pagesCisvariateurpiv PDFdjalikadjouPas encore d'évaluation
- TD - 2 - Mécanique Du SolideDocument3 pagesTD - 2 - Mécanique Du SolidehassegoutePas encore d'évaluation
- 018 S Eval StatiqueDocument2 pages018 S Eval StatiquesedmorabetPas encore d'évaluation
- FichierDocument2 pagesFichierCherki ONkPas encore d'évaluation
- FiabilitéDocument3 pagesFiabilitémaria ben100% (1)
- 111 1 9 Cinematique GraphiqueDocument10 pages111 1 9 Cinematique GraphiqueCherki ONkPas encore d'évaluation
- Cineamtique LoisDocument9 pagesCineamtique LoiskajtiPas encore d'évaluation
- 109 1 7 td1 Torseur CinematiqueDocument2 pages109 1 7 td1 Torseur CinematiqueCherki ONkPas encore d'évaluation
- CI 2020 CorrigéDocument2 pagesCI 2020 Corrigéعبدالرحمان معامريةPas encore d'évaluation
- Cours Les Changements D'état Physique D'un Corps Pur - 1ere AnnéeDocument3 pagesCours Les Changements D'état Physique D'un Corps Pur - 1ere AnnéeSmaali Faouzi Smaali100% (5)
- Cours Transformation Du Mouvement A Rapport FixeDocument10 pagesCours Transformation Du Mouvement A Rapport Fixewadie marzoukiPas encore d'évaluation
- Fiche Technique VMC Double Flux Haut Rendement Sauter Panega Special Combles 2Document1 pageFiche Technique VMC Double Flux Haut Rendement Sauter Panega Special Combles 2LORVMAXXXLPas encore d'évaluation
- Chap17 BTS PDFDocument7 pagesChap17 BTS PDFMhammedSimoPas encore d'évaluation
- RebouilleursDocument20 pagesRebouilleursKenza SADOUKI0% (1)
- GeotechniqueII Cours8 2018-2019Document133 pagesGeotechniqueII Cours8 2018-2019Yahya BerPas encore d'évaluation
- Exercice 3-ConvertiDocument3 pagesExercice 3-Convertichaouachi alarbiPas encore d'évaluation
- Compactage DynamiqueDocument8 pagesCompactage DynamiqueFALLPas encore d'évaluation
- CX470B Ir1317ccfrDocument20 pagesCX470B Ir1317ccfrHamdi JemmaliPas encore d'évaluation
- Transmission de Puissance Avec Transformation de MouvementDocument19 pagesTransmission de Puissance Avec Transformation de MouvementPhil ČhrýstaĺPas encore d'évaluation
- Notice de Montage Et D EntretienDocument44 pagesNotice de Montage Et D EntretienFarid ChekaliPas encore d'évaluation
- Critères de Choix D'un Palier. PrésélectionDocument11 pagesCritères de Choix D'un Palier. PrésélectionDiesePas encore d'évaluation
- Veille TechnologiqueDocument15 pagesVeille TechnologiqueAymen Hssaini100% (1)
- Module: Electrotechnique: Chapitre 4: Machine Asynchrone Triphasée (Partie 1)Document38 pagesModule: Electrotechnique: Chapitre 4: Machine Asynchrone Triphasée (Partie 1)MERIEM LGARRAHPas encore d'évaluation
- Biblio 2004Document4 pagesBiblio 2004Thanh PhongPas encore d'évaluation
- Memoire de Master 2 Eme Annee Calcul EtDocument133 pagesMemoire de Master 2 Eme Annee Calcul EtAdilson Jose Marito MaritoPas encore d'évaluation
- Nettoyage Filtre À Air+remplacement Du Filtre À Gazole+le Nettoyage Vanne EGRDocument13 pagesNettoyage Filtre À Air+remplacement Du Filtre À Gazole+le Nettoyage Vanne EGRAnonymous fufQrPPKHPas encore d'évaluation
- Fiche Technique Moteur Triphasé 110 KW 310-4Document2 pagesFiche Technique Moteur Triphasé 110 KW 310-4karma_headbanger2313100% (1)
- Distributeurs PneumatiquesDocument43 pagesDistributeurs PneumatiquesTchemaka Massaï OlivierPas encore d'évaluation
- Grilles ENSPDDocument3 pagesGrilles ENSPDMichael BassemelPas encore d'évaluation
- Définition ClimatisationDocument40 pagesDéfinition ClimatisationMohammed Amine LabbardiPas encore d'évaluation