Vous aimerez peut-être aussi
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentD'EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentPas encore d'évaluation
- 148 PDFDocument8 pages148 PDFAAS SHPas encore d'évaluation
- Paper DLRK2017 Temme Trempler UAV Into Airport OperationsDocument11 pagesPaper DLRK2017 Temme Trempler UAV Into Airport OperationsOlanrewaju EmmanuelPas encore d'évaluation
- UAV Payload and Misssion Control HW/SW ArchitectureDocument6 pagesUAV Payload and Misssion Control HW/SW ArchitectureAndrea ModeniniPas encore d'évaluation
- Recent Advances in Control and Instrumentation of Unmanned Aerial VehiclesDocument7 pagesRecent Advances in Control and Instrumentation of Unmanned Aerial Vehicleswovaj97072Pas encore d'évaluation
- 01 Accessing From The SkyDocument49 pages01 Accessing From The Skyremonadly2704Pas encore d'évaluation
- Cover SheetDocument7 pagesCover SheetSudheer KumarPas encore d'évaluation
- Reference 14 (1DOF)Document12 pagesReference 14 (1DOF)Muhammad ahmadPas encore d'évaluation
- An All-in-One Dual Band Blade Antenna For ADS-B and 5G Communications in UAV Assisted Wireless NetworksDocument17 pagesAn All-in-One Dual Band Blade Antenna For ADS-B and 5G Communications in UAV Assisted Wireless NetworksdkPas encore d'évaluation
- AdHoc Networks SI R2 FinalDocument29 pagesAdHoc Networks SI R2 FinalBoubacar SimporePas encore d'évaluation
- UAV For 3D Mapping ApplicationsDocument15 pagesUAV For 3D Mapping ApplicationsMert sefasefePas encore d'évaluation
- Advances in Unmanned Aerial Vehicles TechnologiesDocument14 pagesAdvances in Unmanned Aerial Vehicles TechnologiesNAENWI YAABARIPas encore d'évaluation
- Position Controlling of A Flapper Drone Using UWBDocument9 pagesPosition Controlling of A Flapper Drone Using UWBMysa ChakrapaniPas encore d'évaluation
- 2014 Artigo - Mobile 3D Mapping Unmanned Aerial VehicleDocument14 pages2014 Artigo - Mobile 3D Mapping Unmanned Aerial VehicleGlauber Jean Alves NarcisoPas encore d'évaluation
- A Fly-By-Wireless UAV Platform Based On A Flexible and Distributed System ArchitectureDocument6 pagesA Fly-By-Wireless UAV Platform Based On A Flexible and Distributed System ArchitecturePaulPas encore d'évaluation
- Review of Unmanned Aircraft System (UAS) : Suraj G. Gupta, Mangesh M. Ghonge, Dr. P. M. JawandhiyaDocument13 pagesReview of Unmanned Aircraft System (UAS) : Suraj G. Gupta, Mangesh M. Ghonge, Dr. P. M. JawandhiyalanfrancofiorentinoPas encore d'évaluation
- Worldwide Vertical Guidance of AircraftDocument18 pagesWorldwide Vertical Guidance of AircraftOlivier LaylyPas encore d'évaluation
- Design and Analysis of An Unmanned Aerial Vehicle Capable of Carrying The CameraDocument10 pagesDesign and Analysis of An Unmanned Aerial Vehicle Capable of Carrying The CameradosabikPas encore d'évaluation
- Ujme2 15112978 PDFDocument10 pagesUjme2 15112978 PDFdosabikPas encore d'évaluation
- Kong 2014Document8 pagesKong 2014robertoPas encore d'évaluation
- (0-2017) Survey On Computer Vision For UAVs CurrentDevelopments and TrendsDocument28 pages(0-2017) Survey On Computer Vision For UAVs CurrentDevelopments and TrendsBach NguyenPas encore d'évaluation
- Robust Autonomous Navigation of Unmanned Aerial Vehicles (Uavs) For Warehouses' Inventory ApplicationDocument7 pagesRobust Autonomous Navigation of Unmanned Aerial Vehicles (Uavs) For Warehouses' Inventory ApplicationAdeeba AliPas encore d'évaluation
- Automated Vision-Based Recovery of A Rotary Wing Unmanned Aerial Vehicle Onto A Moving PlatformDocument18 pagesAutomated Vision-Based Recovery of A Rotary Wing Unmanned Aerial Vehicle Onto A Moving PlatformLong DươngPas encore d'évaluation
- Free Flight Rotorcraft Flight Test Vhicle Technology DevelopmentDocument12 pagesFree Flight Rotorcraft Flight Test Vhicle Technology Developmentserenay tPas encore d'évaluation
- 25 Digital20 Avionics Pastor PDFDocument9 pages25 Digital20 Avionics Pastor PDF083898025012Pas encore d'évaluation
- Aerial Manipulation: A Literature Review: Fabio Ruggiero, Vincenzo Lippiello, Anibal OlleroDocument8 pagesAerial Manipulation: A Literature Review: Fabio Ruggiero, Vincenzo Lippiello, Anibal OlleroayeshaPas encore d'évaluation
- A Mini Unmanned Aerial Vehicle (Uav) : System Overview and Image AcquisitionDocument7 pagesA Mini Unmanned Aerial Vehicle (Uav) : System Overview and Image AcquisitionhougiePas encore d'évaluation
- J Microrel 2019 02 005Document10 pagesJ Microrel 2019 02 005Tria Ayu PebrianaPas encore d'évaluation
- Real Time and Post-Processing Flight Inspection by Drone: A ReviewDocument8 pagesReal Time and Post-Processing Flight Inspection by Drone: A Reviewfika puteraPas encore d'évaluation
- Electronics: Fastuav-Net: A Multi-Uav Detection Algorithm For Embedded PlatformsDocument19 pagesElectronics: Fastuav-Net: A Multi-Uav Detection Algorithm For Embedded PlatformsHuseyin KusetogullariPas encore d'évaluation
- Sandino U2Document14 pagesSandino U2OM SARDESAI225286Pas encore d'évaluation
- Pajares, Gonzalo - Overview and Current Status of Remote Sensing Applications Based On Unmanned Aerial VehiclesDocument50 pagesPajares, Gonzalo - Overview and Current Status of Remote Sensing Applications Based On Unmanned Aerial VehiclesjuanjoPas encore d'évaluation
- 2011 - Instantaneous Autonomous Aerial Reconnaissance For Civil Applications - A UAV Based Approach To Support Security and Rescue ForcesDocument5 pages2011 - Instantaneous Autonomous Aerial Reconnaissance For Civil Applications - A UAV Based Approach To Support Security and Rescue ForcesAni DalalPas encore d'évaluation
- Unmanned Aerial Vehicle Classification Application PDFDocument20 pagesUnmanned Aerial Vehicle Classification Application PDF083898025012Pas encore d'évaluation
- Convoy ProtectionDocument10 pagesConvoy ProtectionUAVs Australia100% (1)
- Cobertura Optima UAV CortadoDocument11 pagesCobertura Optima UAV CortadoPabloPas encore d'évaluation
- Jamming of UAV Remote Control Systems Using Software Defined RadioDocument7 pagesJamming of UAV Remote Control Systems Using Software Defined RadioGrigore JelerPas encore d'évaluation
- Adaptive Fault-Tolerant Control of A Hybrid Canard Rotor Wing UAV Under Transition Flight Subject To Actuator Faults and Model UncertaintiesDocument16 pagesAdaptive Fault-Tolerant Control of A Hybrid Canard Rotor Wing UAV Under Transition Flight Subject To Actuator Faults and Model UncertaintiesSalman IjazPas encore d'évaluation
- Photogrametry and 3D ModelingDocument7 pagesPhotogrametry and 3D ModelingVeruzkaPas encore d'évaluation
- A Survey On Open-Source Flight Control Platforms of Unmanned Aerial VehicleDocument7 pagesA Survey On Open-Source Flight Control Platforms of Unmanned Aerial Vehicle029Muhammad Robith Fikris SholihPas encore d'évaluation
- UAV-Based Photogrammetric MappingDocument14 pagesUAV-Based Photogrammetric MappingFrida 'vree' Kurniawati100% (2)
- Vehcom BC For UavDocument28 pagesVehcom BC For UavGJ GNANA VENKAT NAGPas encore d'évaluation
- Comparative Study of Indoor Navigation S-1Document11 pagesComparative Study of Indoor Navigation S-1Jayashree T R 21PHD1140Pas encore d'évaluation
- Unmanned Aerial Systems in Military Environments: The Benefits of InteroperabilityDocument5 pagesUnmanned Aerial Systems in Military Environments: The Benefits of InteroperabilityFritz FatigaPas encore d'évaluation
- Sensors 18 04363Document14 pagesSensors 18 04363UsdhdjdkPas encore d'évaluation
- Nex Remondino AG2013 Pre-Print1Document28 pagesNex Remondino AG2013 Pre-Print1Gabriel VasconcelosPas encore d'évaluation
- VSAT2 - 33441 IJAERok15503 15512new2Document11 pagesVSAT2 - 33441 IJAERok15503 15512new2David SiegfriedPas encore d'évaluation
- An Algorithm of Reactive Collision Free 3D Deployment of Networked Unmanned Aerial Vehicles For Surveillance and MonitoringDocument9 pagesAn Algorithm of Reactive Collision Free 3D Deployment of Networked Unmanned Aerial Vehicles For Surveillance and MonitoringAdeeba AliPas encore d'évaluation
- A Safe Open Source 4G Connected Self-Flying Plane With 1 Hour Flight Time and All Up Weight AUW Lt300 G Towards A New Class of Internet Enabled UAVs-1Document23 pagesA Safe Open Source 4G Connected Self-Flying Plane With 1 Hour Flight Time and All Up Weight AUW Lt300 G Towards A New Class of Internet Enabled UAVs-1SeeknDestroy AmmonyaPas encore d'évaluation
- Command Control UavDocument11 pagesCommand Control UavAfework BeziePas encore d'évaluation
- Print2 Uavs Self Leveled TableDocument8 pagesPrint2 Uavs Self Leveled TableKarthik RajaPas encore d'évaluation
- A Novel Landing System To Increase Payload Capacity and Operational Availability of High Altitude Long Endurance UAVsDocument22 pagesA Novel Landing System To Increase Payload Capacity and Operational Availability of High Altitude Long Endurance UAVslin lamlonPas encore d'évaluation
- UAV1Document17 pagesUAV1TamerZakiFouadPas encore d'évaluation
- Remotesensing 14 03908Document17 pagesRemotesensing 14 03908Tekletsadik TeketelPas encore d'évaluation
- Preprints201811 0601 v1 PDFDocument19 pagesPreprints201811 0601 v1 PDFSatrio CiptoPas encore d'évaluation
- Wireless Communication Using Unmanned Aerial Vehicles (Uavs) OptimalDocument14 pagesWireless Communication Using Unmanned Aerial Vehicles (Uavs) OptimalElvor eskanPas encore d'évaluation
- Performance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL SimulatorDocument15 pagesPerformance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL SimulatorMarko SimićPas encore d'évaluation
- Accurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Document8 pagesAccurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Andy FloresPas encore d'évaluation
- Radio Remote-Control and Telemetry and Their Application to MissilesD'EverandRadio Remote-Control and Telemetry and Their Application to MissilesÉvaluation : 4 sur 5 étoiles4/5 (1)
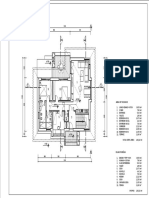
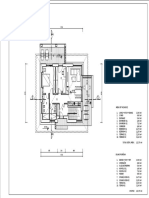
- Kuca Sa Suterenom Tip 05Document2 pagesKuca Sa Suterenom Tip 05Besim BnproPas encore d'évaluation
- Kuca Tip 06Document2 pagesKuca Tip 06Besim BnproPas encore d'évaluation
- Calibration of Action Cameras For Photogrammetric Purposes: Sensors September 2014Document21 pagesCalibration of Action Cameras For Photogrammetric Purposes: Sensors September 2014Besim BnproPas encore d'évaluation
- VitoloScriptGuidelinesFromVideoClips PDFDocument4 pagesVitoloScriptGuidelinesFromVideoClips PDFghrossnegusPas encore d'évaluation
- Callygraphy TemplateDocument1 pageCallygraphy TemplateBesim BnproPas encore d'évaluation
- Template Callygraphy L-ZDocument1 pageTemplate Callygraphy L-ZBesim BnproPas encore d'évaluation
- Bijelatabijaprogram PDFDocument31 pagesBijelatabijaprogram PDFDžumhur Lejla100% (1)
- The Use of Unmanned Aerial Vehicles (Uavs) For Remote Sensing and MappingDocument6 pagesThe Use of Unmanned Aerial Vehicles (Uavs) For Remote Sensing and MappingBesim BnproPas encore d'évaluation
- UAV PhotogrammetryDocument15 pagesUAV PhotogrammetryBesim BnproPas encore d'évaluation
- Bijelatabijaprogram PDFDocument31 pagesBijelatabijaprogram PDFDžumhur Lejla100% (1)
- Hanor X9bDocument9 pagesHanor X9bshiv8860amPas encore d'évaluation
- Mil Module 3Document20 pagesMil Module 3Maria ArlenePas encore d'évaluation
- AJAX PRICE 11-11-23 PricelistDocument8 pagesAJAX PRICE 11-11-23 PricelistKing SoniPas encore d'évaluation
- Doctor Who Original Scripts S3Ep10 D1Document66 pagesDoctor Who Original Scripts S3Ep10 D1JohnnyPas encore d'évaluation
- Reporte Calibracion 2007Document13 pagesReporte Calibracion 2007Javier PalenciaPas encore d'évaluation
- TheMicroscope - How To Use-1Document4 pagesTheMicroscope - How To Use-1SHELO MARIE M. GARCIAPas encore d'évaluation
- State Bank of IndiaDocument3 pagesState Bank of IndiasantoshkumarPas encore d'évaluation
- Keynote - 3200 ISO: Catharsis PDFDocument106 pagesKeynote - 3200 ISO: Catharsis PDFjcecilPas encore d'évaluation
- Riflescope Owners Manual: Complete Installation & Operations InstructionsDocument36 pagesRiflescope Owners Manual: Complete Installation & Operations Instructionsgilbert2130% (1)
- UA EFI-890H BrochureDocument6 pagesUA EFI-890H Brochuredadabarghi66Pas encore d'évaluation
- Photo Journalism: Mass Communication - ViiDocument4 pagesPhoto Journalism: Mass Communication - ViiLaiba IsrarPas encore d'évaluation
- October 2014Document124 pagesOctober 2014jhasua23Pas encore d'évaluation
- Epemag 2000-07Document86 pagesEpemag 2000-07Martin ChipilukPas encore d'évaluation
- Manual Godox TT600Document21 pagesManual Godox TT600fcaroPas encore d'évaluation
- DS-2TD2617-3/P Thermal & Optical Network Bullet Camera: Smart Function (Thermal Imaging)Document6 pagesDS-2TD2617-3/P Thermal & Optical Network Bullet Camera: Smart Function (Thermal Imaging)l1f3b00kPas encore d'évaluation
- Pink and Purple Round and Friendly Ice Breaker Class Activity Self Portrait Education PresentationDocument12 pagesPink and Purple Round and Friendly Ice Breaker Class Activity Self Portrait Education PresentationKyla Kim AriasPas encore d'évaluation
- Media and Information Languages (Part 2) Digital Storytelling - Video Project (Camera Techniques, Treatment and Storyboard)Document31 pagesMedia and Information Languages (Part 2) Digital Storytelling - Video Project (Camera Techniques, Treatment and Storyboard)Emarkzkie Mosra OrecrebPas encore d'évaluation
- Smart Cameras As Embedded Systems: Raksha SudhakarDocument14 pagesSmart Cameras As Embedded Systems: Raksha Sudhakarrohan66Pas encore d'évaluation
- KodakDocument8 pagesKodakRikdip RoyPas encore d'évaluation
- Instagram Story Ideas by Catarina MelloDocument13 pagesInstagram Story Ideas by Catarina MelloMaria100% (1)
- 8310-804 Door Mounted Safety Sensor: User'S GuideDocument9 pages8310-804 Door Mounted Safety Sensor: User'S GuideAlaâ SemaanPas encore d'évaluation
- Characterization of A Digital Camera AsDocument20 pagesCharacterization of A Digital Camera AsZlatko OžanićPas encore d'évaluation
- What Is The Difference Between 1080p, 480p, 720p, Blueray, BRRIP, CAM, DVDrip, DVDSCR, Hdrip, HDTS, HDTV or WebRip - QuoraDocument7 pagesWhat Is The Difference Between 1080p, 480p, 720p, Blueray, BRRIP, CAM, DVDrip, DVDSCR, Hdrip, HDTS, HDTV or WebRip - QuoraAyan Khan AnsariPas encore d'évaluation
- All PentaxDocument13 pagesAll PentaxAmelia PatiñoPas encore d'évaluation
- Blackmagic Pocket Cinema Camera 4k TechspecsDocument8 pagesBlackmagic Pocket Cinema Camera 4k TechspecsLeonardo Terra CravoPas encore d'évaluation
- Final Submission DS by Arshia MehraDocument18 pagesFinal Submission DS by Arshia MehraARSHIA MEHRAPas encore d'évaluation
- Ss ScopeDocument1 pageSs ScopebinepaPas encore d'évaluation
- Brochure Panalex 2Document2 pagesBrochure Panalex 2Ahmed NourPas encore d'évaluation
- Case For Pokayoke & SensorDocument56 pagesCase For Pokayoke & SensorSukhdev BhatiaPas encore d'évaluation
- English 5 Lesson 2Document5 pagesEnglish 5 Lesson 2Ariane Mae MasangkayPas encore d'évaluation