Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Résumé Emily Martin FullDocument3 pagesRésumé Emily Martin FullEmily MartinPas encore d'évaluation
- Dashrath Nandan JAVA (Unit2) NotesDocument18 pagesDashrath Nandan JAVA (Unit2) NotesAbhinandan Singh RanaPas encore d'évaluation
- Laser Mig - Hybrid - WeldinggDocument26 pagesLaser Mig - Hybrid - WeldinggFeratPas encore d'évaluation
- PERSONAL DEVELOPMENT (What Is Personal Development?)Document37 pagesPERSONAL DEVELOPMENT (What Is Personal Development?)Ronafe Roncal GibaPas encore d'évaluation
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocument6 pagesDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiPas encore d'évaluation
- Agriculture Vision 2020Document10 pagesAgriculture Vision 20202113713 PRIYANKAPas encore d'évaluation
- Disbursement VoucherDocument7 pagesDisbursement VoucherDan MarkPas encore d'évaluation
- Day 2 - Evident's Official ComplaintDocument18 pagesDay 2 - Evident's Official ComplaintChronicle Herald100% (1)
- Konsep Negara Hukum Dalam Perspektif Hukum IslamDocument11 pagesKonsep Negara Hukum Dalam Perspektif Hukum IslamSiti MasitohPas encore d'évaluation
- Development of PBAT Based Bio Filler Masterbatch: A Scientific Research Proposal OnDocument15 pagesDevelopment of PBAT Based Bio Filler Masterbatch: A Scientific Research Proposal OnManmathPas encore d'évaluation
- WT&D (Optimization of WDS) PDFDocument89 pagesWT&D (Optimization of WDS) PDFAbirham TilahunPas encore d'évaluation
- INA Over Drive Pulley SystemDocument1 pageINA Over Drive Pulley SystemDaniel JulianPas encore d'évaluation
- OMN-TRA-SSR-OETC-Course Workbook 2daysDocument55 pagesOMN-TRA-SSR-OETC-Course Workbook 2daysMANIKANDAN NARAYANASAMYPas encore d'évaluation
- Bhagwan Mahavir College of Architecture: Topic: Lacing, Batteneing, BracingDocument14 pagesBhagwan Mahavir College of Architecture: Topic: Lacing, Batteneing, BracingJai MenDparaPas encore d'évaluation
- Beginning Cosmetic ChemistryDocument1 pageBeginning Cosmetic ChemistrySergio Rugerio0% (1)
- Dark Energy Survey DES CollaborationDocument38 pagesDark Energy Survey DES CollaborationgeorgcantorPas encore d'évaluation
- Amberjet™ 1500 H: Industrial Grade Strong Acid Cation ExchangerDocument2 pagesAmberjet™ 1500 H: Industrial Grade Strong Acid Cation ExchangerJaime SalazarPas encore d'évaluation
- TMA GuideDocument3 pagesTMA GuideHamshavathini YohoratnamPas encore d'évaluation
- The Making of A Scientist Class 10Document2 pagesThe Making of A Scientist Class 10abhigna.ravikumarPas encore d'évaluation
- Building g5Document45 pagesBuilding g5ammarsteel68Pas encore d'évaluation
- Oss Kpi SummaryDocument7 pagesOss Kpi SummaryMohd FaizPas encore d'évaluation
- CSCI 123 - Final ExamDocument15 pagesCSCI 123 - Final ExamBrianYoungPas encore d'évaluation
- Office Administration: School-Based AssessmentDocument17 pagesOffice Administration: School-Based AssessmentFelix LawrencePas encore d'évaluation
- Acdc - DC Motor - Lecture Notes 5Document30 pagesAcdc - DC Motor - Lecture Notes 5Cllyan ReyesPas encore d'évaluation
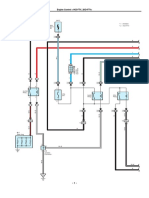
- Diagrama Hilux 1KD-2KD PDFDocument11 pagesDiagrama Hilux 1KD-2KD PDFJeni100% (1)
- Citing Correctly and Avoiding Plagiarism: MLA Format, 7th EditionDocument4 pagesCiting Correctly and Avoiding Plagiarism: MLA Format, 7th EditionDanish muinPas encore d'évaluation
- Datasheet 6A8 FusívelDocument3 pagesDatasheet 6A8 FusívelMluz LuzPas encore d'évaluation
- Diffrent Types of MapDocument3 pagesDiffrent Types of MapIan GamitPas encore d'évaluation
- B205A TMA Project Spring 2021 - UpdatedDocument6 pagesB205A TMA Project Spring 2021 - UpdatedIoan 23Pas encore d'évaluation
- List of Institutions With Ladderized Program Under Eo 358 JULY 2006 - DECEMBER 31, 2007Document216 pagesList of Institutions With Ladderized Program Under Eo 358 JULY 2006 - DECEMBER 31, 2007Jen CalaquiPas encore d'évaluation