Vous aimerez peut-être aussi
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1D'EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Évaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Ultrasonic TransducerDocument5 pagesUltrasonic TransducerRishabhKarn100% (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Ultrasonic Distance MeterDocument5 pagesUltrasonic Distance MeterMahesh Jadhav100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- 1) Wireless Headphone ReceiverDocument28 pages1) Wireless Headphone ReceiverPetarPetrovicPas encore d'évaluation
- Electronics Hobby CircuitsDocument183 pagesElectronics Hobby Circuitsbeckam88100% (3)
- Wouxun KG 689Document36 pagesWouxun KG 689balajiboss005Pas encore d'évaluation
- Alan48excel Multi All PapersDocument32 pagesAlan48excel Multi All PapersvideoadvertPas encore d'évaluation
- Amateur Radio Electronics on Your MobileD'EverandAmateur Radio Electronics on Your MobileÉvaluation : 5 sur 5 étoiles5/5 (1)
- Blitz mj327 Service ManualDocument20 pagesBlitz mj327 Service ManualDario BessonePas encore d'évaluation
- Theory of Operation 118716Document5 pagesTheory of Operation 118716eakPas encore d'évaluation
- Theory of Operations: 1.transmitterDocument2 pagesTheory of Operations: 1.transmitterfixPas encore d'évaluation
- CounterDocument11 pagesCounterDatpmPas encore d'évaluation
- LF358Document6 pagesLF358kurtm22100% (1)
- Ham International Multi Mode 2 Service ManualDocument10 pagesHam International Multi Mode 2 Service Manualbill1068Pas encore d'évaluation
- Safety Guard For Blind WorkingDocument7 pagesSafety Guard For Blind WorkingSahil SethiPas encore d'évaluation
- Design and Construction of A Remote Controlled Fan RegulatorDocument9 pagesDesign and Construction of A Remote Controlled Fan RegulatorkaushaletPas encore d'évaluation
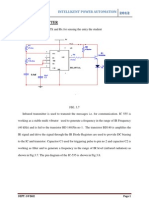
- 3.3. Ir Transmitter: Intelligent Power AutomationDocument5 pages3.3. Ir Transmitter: Intelligent Power AutomationJay VermaPas encore d'évaluation
- The DSE Radio Direction Finder PDFDocument4 pagesThe DSE Radio Direction Finder PDFlazarosPas encore d'évaluation
- CMPE 30094 - BSCPE 3-1: Logic Circuits and Design (Laboratory)Document7 pagesCMPE 30094 - BSCPE 3-1: Logic Circuits and Design (Laboratory)AngelicaPas encore d'évaluation
- Add-On Stereo Channel Selector: Circuit IdeasDocument18 pagesAdd-On Stereo Channel Selector: Circuit IdeasNastasoiu NeluPas encore d'évaluation
- 25638-Acquire Images With A Sensor and A Micro Controller PDFDocument5 pages25638-Acquire Images With A Sensor and A Micro Controller PDFSzilagyi SebaPas encore d'évaluation
- AssignmentDocument11 pagesAssignmentfalab toheebPas encore d'évaluation
- SeniorDocument10 pagesSeniorMazen El-KikPas encore d'évaluation
- Design and Construction of A Remote Controlled Power Supply UnitDocument10 pagesDesign and Construction of A Remote Controlled Power Supply Unitzungeru01Pas encore d'évaluation
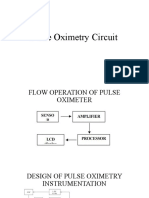
- Pulse Oximetry CircuitDocument19 pagesPulse Oximetry Circuitنواف الجهنيPas encore d'évaluation
- DR-130 Service ManualDocument38 pagesDR-130 Service ManualRobert/YG2AKR100% (1)
- A Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaiDocument7 pagesA Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaitoloicePas encore d'évaluation
- Audio-Video Systems: AIM: - To Study About Tuner SectionDocument5 pagesAudio-Video Systems: AIM: - To Study About Tuner SectionAtit PatelPas encore d'évaluation
- Micro Controller Based Home SecurityDocument41 pagesMicro Controller Based Home SecurityPramod PrajapatiPas encore d'évaluation
- MInitransceiver SSB 80mDocument8 pagesMInitransceiver SSB 80mag1tatorPas encore d'évaluation
- Repairing Switching Power SupplyDocument16 pagesRepairing Switching Power SupplyAnonymous ulmnz5yT67% (3)
- LAb 1Document8 pagesLAb 1nazmyPas encore d'évaluation
- Fig. 1: Clap Switch Block DiagramDocument26 pagesFig. 1: Clap Switch Block DiagramDiljot Singh 236Pas encore d'évaluation
- Implementation of Frequency Demodulator Using The PLL Demodulation MethodDocument4 pagesImplementation of Frequency Demodulator Using The PLL Demodulation MethodasmonovPas encore d'évaluation
- Ec 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsDocument68 pagesEc 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsArchit SrivastavaPas encore d'évaluation
- Rangkaian Saklar Sensor UltrasonikDocument2 pagesRangkaian Saklar Sensor Ultrasoniksidodoy100% (1)
- 3172V21 - Synthesised WBFM TransmitterDocument6 pages3172V21 - Synthesised WBFM Transmitterjoniez14Pas encore d'évaluation
- SonarDocument14 pagesSonarUros SmiljanicPas encore d'évaluation
- Biomedical Instrumentation Lab 1Document95 pagesBiomedical Instrumentation Lab 1EmirDefa50% (2)
- Crystal Oscillator Time BaseDocument4 pagesCrystal Oscillator Time BaseOliverQueen773sPas encore d'évaluation
- Tcl2027u m28 - 0Document56 pagesTcl2027u m28 - 0Enrile Labiano BaduaPas encore d'évaluation
- Ultra-Low Power Phase-Locked LoopDocument4 pagesUltra-Low Power Phase-Locked Loophawking1122Pas encore d'évaluation
- Chapter 5Document22 pagesChapter 5Tarek BouallegPas encore d'évaluation
- Wireless Stepper Motor ControllersDocument2 pagesWireless Stepper Motor ControllersNitheesh RajPas encore d'évaluation
- Automatic Guitar Tuner: Project OverviewDocument9 pagesAutomatic Guitar Tuner: Project OverviewGustavo Pinares MamaniPas encore d'évaluation
- CKT DSRPTNDocument10 pagesCKT DSRPTNMadhusudan MunegalPas encore d'évaluation
- AN1303 A Simple 4-20 Ma Pressure Transducer Evaluation BoardDocument8 pagesAN1303 A Simple 4-20 Ma Pressure Transducer Evaluation BoardFadilla El HuSnaPas encore d'évaluation
- That You Read All The Background Information of This Laboratory BEFORE Proceding With The ExperimentDocument14 pagesThat You Read All The Background Information of This Laboratory BEFORE Proceding With The ExperimentRajith MohananPas encore d'évaluation
- Laser Based Communication System PDFDocument3 pagesLaser Based Communication System PDFPawan Kumar100% (1)
- Commn Systems Lab ManualDocument37 pagesCommn Systems Lab Manualnidheeshlal10Pas encore d'évaluation
- Objective/ AimDocument8 pagesObjective/ AimNitin RoyPas encore d'évaluation
- Reception of Amplitude Modulated Signals AM DemodulationDocument9 pagesReception of Amplitude Modulated Signals AM DemodulationKenburPas encore d'évaluation
- Lecture 8-RLC CircuitsDocument17 pagesLecture 8-RLC CircuitsMAENYA BRUCE OYONDIPas encore d'évaluation
- Keywords Earthing Designs Substation Earthing Resistance Grid Potential Rise Mesh Voltage Step Voltage and Matlab Figures - CompressDocument6 pagesKeywords Earthing Designs Substation Earthing Resistance Grid Potential Rise Mesh Voltage Step Voltage and Matlab Figures - CompressDebasish RahaPas encore d'évaluation
- PDF Mobieye 700 Service Manual v10 en 1632361886 CompressDocument20 pagesPDF Mobieye 700 Service Manual v10 en 1632361886 CompressDONOVAN FELIPE CORDOBA MARTINEZ100% (1)
- Dow-UCarsol Physical Solvent PDFDocument3 pagesDow-UCarsol Physical Solvent PDFJenn BellPas encore d'évaluation
- Dellemc Poweredge Raid Controller h745 DatasheetDocument2 pagesDellemc Poweredge Raid Controller h745 DatasheetAndres MartinezPas encore d'évaluation
- Redis ClusterDocument17 pagesRedis Cluster최현준50% (2)
- 9.1.13.5 Dry Type Transformer User ManualDocument6 pages9.1.13.5 Dry Type Transformer User ManualDindie GarvidaPas encore d'évaluation
- Treinamento KACE SMADocument183 pagesTreinamento KACE SMAValériaPas encore d'évaluation
- Virtualizing Rockwell Apps by Stratus TechnologiesDocument22 pagesVirtualizing Rockwell Apps by Stratus TechnologiesRachiahi TarikPas encore d'évaluation
- Band 5 EssaysDocument18 pagesBand 5 Essays曾迦圆Pas encore d'évaluation
- Balachandar Sridharan: Devops EngineerDocument3 pagesBalachandar Sridharan: Devops EngineerVishnu SelvamPas encore d'évaluation
- Model QAP For Plates1Document3 pagesModel QAP For Plates1tarun kaushalPas encore d'évaluation
- EEE UIET PdfblueDocument15 pagesEEE UIET PdfblueAnshul KashyapPas encore d'évaluation
- RDB ManualDocument160 pagesRDB ManualgamunozdPas encore d'évaluation
- SJ-20141127113509-001-ZXSDR R8872A (HV1.0) Product Description - 732736Document20 pagesSJ-20141127113509-001-ZXSDR R8872A (HV1.0) Product Description - 732736Rehan Haider JafferyPas encore d'évaluation
- Sony HBD-HZ970W - IZ1000W Ver. 1.0 2010.06 Blu-Ray Disc Player SMDocument138 pagesSony HBD-HZ970W - IZ1000W Ver. 1.0 2010.06 Blu-Ray Disc Player SMboroda2410Pas encore d'évaluation
- Question Bank Unit 2 SepmDocument2 pagesQuestion Bank Unit 2 SepmAKASH V (RA2111003040108)Pas encore d'évaluation
- Rectt PS Group B Notification 2023Document16 pagesRectt PS Group B Notification 2023MANOJ VIJAYANPas encore d'évaluation
- DG 03 001-E 04-03 ARGOSDocument35 pagesDG 03 001-E 04-03 ARGOSrickyPas encore d'évaluation
- Notes-Chapter 1Document5 pagesNotes-Chapter 1Echa LassimPas encore d'évaluation
- Alfasud 8v EngineDocument6 pagesAlfasud 8v EngineAlexandru IonescuPas encore d'évaluation
- Telenor Call, SMS & Internet Packages - Daily, Weekly & Monthly Bundles (June, 2022)Document16 pagesTelenor Call, SMS & Internet Packages - Daily, Weekly & Monthly Bundles (June, 2022)Yasir ButtPas encore d'évaluation
- AD353 131r2Document6 pagesAD353 131r2losmoscasbrPas encore d'évaluation
- Veri Log TutorialDocument10 pagesVeri Log TutorialMubashir AliPas encore d'évaluation
- EK 2109 Airframe Structures (General Concepts)Document30 pagesEK 2109 Airframe Structures (General Concepts)Menara TegasPas encore d'évaluation
- 01 A18 Electronic Control SystemDocument136 pages01 A18 Electronic Control Systemkibreaa100% (6)
- Case Study: Python: Functional ProgrammingDocument45 pagesCase Study: Python: Functional ProgrammingTân Như ĐinhPas encore d'évaluation
- Beer Filtration With Diatomite - Imerys PDFDocument4 pagesBeer Filtration With Diatomite - Imerys PDFLeandro ChSanzPas encore d'évaluation
- Chapter 07Document41 pagesChapter 07Prasanna Nivas ÄrrPas encore d'évaluation
- Paas JDDocument1 pagePaas JDNithesh RaoPas encore d'évaluation
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tD'EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tÉvaluation : 4.5 sur 5 étoiles4.5/5 (27)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosD'EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4.5 sur 5 étoiles4.5/5 (543)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersD'Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersÉvaluation : 5 sur 5 étoiles5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonD'EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonÉvaluation : 5 sur 5 étoiles5/5 (2)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsD'EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsPas encore d'évaluation
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeD'EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...D'EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Pas encore d'évaluation
- Electronics All-in-One For Dummies, 3rd EditionD'EverandElectronics All-in-One For Dummies, 3rd EditionÉvaluation : 5 sur 5 étoiles5/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesD'EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceD'EverandAnalog Design and Simulation Using OrCAD Capture and PSpicePas encore d'évaluation
- Current Interruption Transients CalculationD'EverandCurrent Interruption Transients CalculationÉvaluation : 4 sur 5 étoiles4/5 (1)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialD'EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Teach Yourself Electricity and Electronics, 6th EditionD'EverandTeach Yourself Electricity and Electronics, 6th EditionÉvaluation : 3.5 sur 5 étoiles3.5/5 (15)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignD'EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignPas encore d'évaluation
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsD'EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldD'EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldÉvaluation : 4 sur 5 étoiles4/5 (87)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsD'EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovPas encore d'évaluation