Vous aimerez peut-être aussi
- Exploitation Élastique Et Plastique Des SectionsDocument7 pagesExploitation Élastique Et Plastique Des SectionsChahrazed ZelloutaPas encore d'évaluation
- TRACTIONDocument8 pagesTRACTIONMohamedBenKacemPas encore d'évaluation
- Chapitre 6 Flexion SimpleDocument9 pagesChapitre 6 Flexion SimpleArsene KouamePas encore d'évaluation
- Chapitre8 TorsionDocument7 pagesChapitre8 TorsionPixel ShicPas encore d'évaluation
- Chap.6 - Flexion Des Poutres - Précontrainte TotaleDocument15 pagesChap.6 - Flexion Des Poutres - Précontrainte TotaleIhab BougheraraPas encore d'évaluation
- Poteau XDocument7 pagesPoteau XMohsin El YalaouiPas encore d'évaluation
- Corrigé de Interro No1 2023Document2 pagesCorrigé de Interro No1 2023Anis LatrechePas encore d'évaluation
- Chap2+td2 TitoumDocument12 pagesChap2+td2 TitoumZerguine MalakPas encore d'évaluation
- Cours MMC-CHAPITRE 5-Criteres de Limite ElastiqueDocument12 pagesCours MMC-CHAPITRE 5-Criteres de Limite ElastiqueAxel BekaertPas encore d'évaluation
- Chap 2 - Traction - Compression-1Document8 pagesChap 2 - Traction - Compression-1Medeho kodjo Simon henochPas encore d'évaluation
- EL AIDI - AbdollahDocument7 pagesEL AIDI - AbdollahHOUSSAME NAIMPas encore d'évaluation
- RDM 2Document17 pagesRDM 2Bendagheur AbdelkaderPas encore d'évaluation
- Correction Des ApplicationsDocument11 pagesCorrection Des ApplicationsYoussef Gharsallah100% (1)
- Chapitre 5 CisaillementDocument3 pagesChapitre 5 CisaillementSiwar AbbesPas encore d'évaluation
- Cour Chap 7Document4 pagesCour Chap 7Rachid GuessasPas encore d'évaluation
- MMC Composites 4Document6 pagesMMC Composites 4zeryouh oumaymaPas encore d'évaluation
- S118 FlexionDocument28 pagesS118 FlexionmahdiPas encore d'évaluation
- CHP 02 Spécificité Du Calcul Des Composites-ConvertiDocument9 pagesCHP 02 Spécificité Du Calcul Des Composites-ConvertiGhebouli SamirPas encore d'évaluation
- Cours Effort Tranchent (E)Document29 pagesCours Effort Tranchent (E)Fakhrou ZahoutPas encore d'évaluation
- III. Calcul Des RessortsDocument3 pagesIII. Calcul Des RessortsSamar ArbiPas encore d'évaluation
- Chapitre IV Calcul Des Sollicitations Dans Les VoilesDocument11 pagesChapitre IV Calcul Des Sollicitations Dans Les VoilesFarid Messaad100% (1)
- MateritractionDocument12 pagesMateritractionfathallah karimPas encore d'évaluation
- Application de Méthodes de LaGrangeDocument4 pagesApplication de Méthodes de LaGrangekhaouarizmi informatiquePas encore d'évaluation
- II Ii1Document15 pagesII Ii1Oloufadé hafizPas encore d'évaluation
- Fitia SIM M1 Résumé RhéologieDocument9 pagesFitia SIM M1 Résumé RhéologieFazio YveretPas encore d'évaluation
- CisaillementDocument8 pagesCisaillementtructructruc222222Pas encore d'évaluation
- Techniques de Haute Tension CorrectionDocument2 pagesTechniques de Haute Tension CorrectionHaitem KalkoulPas encore d'évaluation
- Rapport Final Cherrabi (À Imprimer)Document29 pagesRapport Final Cherrabi (À Imprimer)hasna zahriPas encore d'évaluation
- CoursDocument29 pagesCourswalid YayaPas encore d'évaluation
- Cours de Mecanique Resistance Des MateriauxDocument46 pagesCours de Mecanique Resistance Des MateriauxDavid parolePas encore d'évaluation
- 3 Travail Et Énergie CinétiqueDocument9 pages3 Travail Et Énergie CinétiqueJihad ELPas encore d'évaluation
- EDM2Document12 pagesEDM2mezyan reggaiPas encore d'évaluation
- TD-2 - Déversement Des PoutresfdDocument3 pagesTD-2 - Déversement Des Poutresfdرشاد صيفان100% (1)
- Chapitre IV - Calcul de Résistance PDFDocument55 pagesChapitre IV - Calcul de Résistance PDFsaada faroukPas encore d'évaluation
- CHP 04 Critères de Rupture ClassiqueDocument6 pagesCHP 04 Critères de Rupture ClassiqueGhebouli SamirPas encore d'évaluation
- Traction 021021Document2 pagesTraction 021021achraf benfateh أشرف بن فاتحPas encore d'évaluation
- Corrigé TPDocument6 pagesCorrigé TPOmar Rodriguez del VillarrealPas encore d'évaluation
- Gazo - Series3 ManualSlns2023Document5 pagesGazo - Series3 ManualSlns2023Ikram KouidriPas encore d'évaluation
- Examen - Endommagement Par Fatigue 2021Document1 pageExamen - Endommagement Par Fatigue 2021abdo tmPas encore d'évaluation
- B Ton Arm 2Document22 pagesB Ton Arm 2Omar OubahaPas encore d'évaluation
- Corrigés TD Essai MécaniqueDocument10 pagesCorrigés TD Essai Mécaniqueanimgharbi890Pas encore d'évaluation
- Resume VFDocument13 pagesResume VFAziz AMAKRANEPas encore d'évaluation
- AfifDocument9 pagesAfifJihene Ben KacemPas encore d'évaluation
- TD: Calcul Non Linéaire Des Structures, Ing2 GCDocument7 pagesTD: Calcul Non Linéaire Des Structures, Ing2 GCMohamed Thiam HD100% (1)
- Solution TD 4Document3 pagesSolution TD 4Hocine HohoPas encore d'évaluation
- Résumé ElasticitéDocument4 pagesRésumé Elasticitémohammed belhadj kelkalPas encore d'évaluation
- MMC Chapitre 2 Contrainte - Tanseur de ContrainteDocument11 pagesMMC Chapitre 2 Contrainte - Tanseur de Contraintekassaui mohamedPas encore d'évaluation
- Appareil D'appuiDocument25 pagesAppareil D'appuisaad chaymaPas encore d'évaluation
- Chapitre 2 Flexion ComposéeDocument20 pagesChapitre 2 Flexion ComposéeLiliPas encore d'évaluation
- CMM TD2 Exercices Et Corrigã© - MoodDocument6 pagesCMM TD2 Exercices Et Corrigã© - MoodMohamed GrinePas encore d'évaluation
- Cours (Conception Des Machine I)Document260 pagesCours (Conception Des Machine I)KHALIL IDRISSIPas encore d'évaluation
- Les Contraintes Et Déformation Engendrées Dans Les Poutres Par Les Éléments de RéductionDocument10 pagesLes Contraintes Et Déformation Engendrées Dans Les Poutres Par Les Éléments de RéductionRose EvaPas encore d'évaluation
- Energie CinetiqueDocument9 pagesEnergie CinetiqueAHMEDPas encore d'évaluation
- Travail Et Energie Cinetique Cours 2Document9 pagesTravail Et Energie Cinetique Cours 2Smove Oner100% (1)
- Examen RDM 2019s2Document4 pagesExamen RDM 2019s2lamiabejaouiPas encore d'évaluation
- TRACTIONDocument6 pagesTRACTIONAbi ClémentPas encore d'évaluation
- CH VII. DéversementDocument7 pagesCH VII. DéversementAli EmbarecPas encore d'évaluation
- Chapitre 2 Resistance Elements MachineDocument4 pagesChapitre 2 Resistance Elements MachineImad BouhafsPas encore d'évaluation
- Charpente MétalliqueDocument10 pagesCharpente MétalliqueIng Nour-Eddine100% (9)
- Les Produits SidérurgiquesDocument23 pagesLes Produits Sidérurgiquessami hayatPas encore d'évaluation
- La Resistance Des Materiaux-Extrait PDFDocument21 pagesLa Resistance Des Materiaux-Extrait PDFNaoufel Akr100% (1)
- TP3 - Essai Los EngelesDocument2 pagesTP3 - Essai Los Engelessami hayatPas encore d'évaluation
- Article 8Document3 pagesArticle 8sami hayatPas encore d'évaluation
- Technique Et Regles de Construction (Chap1 Et 2)Document8 pagesTechnique Et Regles de Construction (Chap1 Et 2)sami hayat100% (1)
- BC22Document0 pageBC22Khaled LobanzPas encore d'évaluation
- TP NDTDocument7 pagesTP NDTSalima Mima100% (1)
- MDS TP4Document5 pagesMDS TP4sami hayatPas encore d'évaluation
- TP MDCDocument13 pagesTP MDCsami hayatPas encore d'évaluation
- Article 8Document3 pagesArticle 8sami hayatPas encore d'évaluation
- Resultats Des Tests CSTBDocument56 pagesResultats Des Tests CSTBsami hayatPas encore d'évaluation
- MDS TP3Document6 pagesMDS TP3sami hayatPas encore d'évaluation
- TP 2 - Analyse Granulométrique Dun SableDocument5 pagesTP 2 - Analyse Granulométrique Dun Sablesami hayatPas encore d'évaluation
- TP TopoDocument7 pagesTP Toposami hayatPas encore d'évaluation
- TP3 - Essai Los EngelesDocument2 pagesTP3 - Essai Los Engelessami hayatPas encore d'évaluation
- TP TopoDocument7 pagesTP Toposami hayatPas encore d'évaluation
- Resultats Des Tests CSTBDocument56 pagesResultats Des Tests CSTBsami hayatPas encore d'évaluation
- Essai D'affaissement PDFDocument6 pagesEssai D'affaissement PDFAbdoulaye100% (1)
- Essai D'écrasement Du BétonDocument8 pagesEssai D'écrasement Du BétonRose Rose91% (22)
- MDS TP2Document5 pagesMDS TP2sami hayatPas encore d'évaluation
- 109690-Article Text-301262-1-10-20141112Document12 pages109690-Article Text-301262-1-10-20141112ZZZPas encore d'évaluation
- TP 2 - Analyse Granulométrique Dun SableDocument5 pagesTP 2 - Analyse Granulométrique Dun Sablesami hayatPas encore d'évaluation
- Mesure de La Résistance A La CompressionDocument10 pagesMesure de La Résistance A La Compressionzakaria50% (2)
- Methode de Dreux GorisseDocument13 pagesMethode de Dreux GorisseAimad Goumi89% (57)
- TP MDCDocument13 pagesTP MDCsami hayatPas encore d'évaluation
- MDS TP3Document6 pagesMDS TP3sami hayatPas encore d'évaluation
- MDS TP4Document5 pagesMDS TP4sami hayatPas encore d'évaluation
- Exposé TopographieDocument20 pagesExposé Topographiesami hayatPas encore d'évaluation
- Devis Mur de Cloture en ZemermaneDocument17 pagesDevis Mur de Cloture en ZemermaneBouzana FouadPas encore d'évaluation
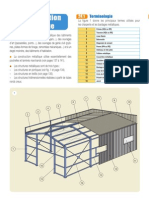
- La Terminologie en Construction MétalliqueDocument10 pagesLa Terminologie en Construction MétalliqueOmar OmarPas encore d'évaluation
- CCTP DindeDocument190 pagesCCTP DindeJean Emmanuel DjomoPas encore d'évaluation
- Mur de SoutenementDocument78 pagesMur de SoutenementAnonymous DaXNRmzvb9Pas encore d'évaluation
- SANDVIKDocument515 pagesSANDVIKmarhiPas encore d'évaluation
- Descente de Charges - PrincipeDocument14 pagesDescente de Charges - PrincipeGuillaume HOUNAKE100% (1)
- CAUE - Bibliographie Matériaux, Techniques Et Isolation Pour Maison ÉcologiqueDocument2 pagesCAUE - Bibliographie Matériaux, Techniques Et Isolation Pour Maison ÉcologiqueMichel WalkowiakPas encore d'évaluation
- Memoire FINAL PDFDocument131 pagesMemoire FINAL PDFKhelifi AyaPas encore d'évaluation
- SaidDocument19 pagesSaidMohamed KanzoutPas encore d'évaluation
- 02 Plaque Standard BA13 PDFDocument1 page02 Plaque Standard BA13 PDFSoufyane AbabouPas encore d'évaluation
- Contenu 760093Document7 pagesContenu 760093Walid TorkhaniPas encore d'évaluation
- Matériaux de Construction Et Architecture Durable Etude Cout Qualité DélaiDocument101 pagesMatériaux de Construction Et Architecture Durable Etude Cout Qualité Délaiiheb abdennaji100% (1)
- L'agrafage Des FissuresDocument3 pagesL'agrafage Des FissuresOuahidAbdouhPas encore d'évaluation
- Utilisation Et Modèle de Plaquette Suivant Usage PDFDocument56 pagesUtilisation Et Modèle de Plaquette Suivant Usage PDFEvTech PhilPas encore d'évaluation
- Étude Des Ouvrages en Maçonnerie Du Génie Civil: Aptitude Au Service, Sécurité Et Performances EnvironnementalesDocument147 pagesÉtude Des Ouvrages en Maçonnerie Du Génie Civil: Aptitude Au Service, Sécurité Et Performances EnvironnementalesSalah TellaiPas encore d'évaluation
- 04 MENUISERIES EXTERIEURES BERROUETA MAISONS Ind BDocument20 pages04 MENUISERIES EXTERIEURES BERROUETA MAISONS Ind BAbderrahmane BouslamaPas encore d'évaluation
- Avis Technique 3.1/16-906 - V1: Plancher Surélevé en Béton Reinforced Concrete Raised FloorDocument22 pagesAvis Technique 3.1/16-906 - V1: Plancher Surélevé en Béton Reinforced Concrete Raised FloorAnas Tijani ModarPas encore d'évaluation
- CPS Achèvement Des Travaux El+RF RP4115 (Actualisé FT)Document60 pagesCPS Achèvement Des Travaux El+RF RP4115 (Actualisé FT)Dounia ElkPas encore d'évaluation
- Béton Armé Généralités: Chapitre 2Document111 pagesBéton Armé Généralités: Chapitre 2SAYOURI MOHAMMEDPas encore d'évaluation
- A3 PDFDocument4 pagesA3 PDFHIND SANOGOPas encore d'évaluation
- Sujet 3 - Examen RDM Juillet 2016Document2 pagesSujet 3 - Examen RDM Juillet 2016Donatien FodjoPas encore d'évaluation
- 2t 2012Document9 pages2t 2012YoucefPas encore d'évaluation
- Le Gros OeuvreDocument112 pagesLe Gros OeuvreJimmy Rostant100% (1)
- Details Affiche IMMATDocument6 pagesDetails Affiche IMMATMounir FrijaPas encore d'évaluation
- Extrait 42223210Document50 pagesExtrait 42223210rockmanqh100% (1)
- Cours - Ossature Metallique - Procedes Generaux de ConstructionDocument4 pagesCours - Ossature Metallique - Procedes Generaux de ConstructionHACHEM-FATHIPas encore d'évaluation
- Toulait Tinhinane, Ailam SofaineDocument157 pagesToulait Tinhinane, Ailam SofaineAbdel Kader CheikhPas encore d'évaluation
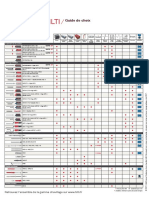
- Guide de Choix ChevillageDocument1 pageGuide de Choix ChevillagecamiliaPas encore d'évaluation
- Post Tension Flat Slab Design ExampleDocument2 pagesPost Tension Flat Slab Design ExampleAnonymous 0tT3SePas encore d'évaluation
- SodaPDF-converted-cv JLDocument2 pagesSodaPDF-converted-cv JLwadiixxPas encore d'évaluation