Vous aimerez peut-être aussi
- Electronique AutoDocument13 pagesElectronique Autoaymendab100% (2)
- Formulaire ECSDocument40 pagesFormulaire ECSErromayssae Majda100% (1)
- Cours & TP & TD Et Site Génie EléctriqueDocument15 pagesCours & TP & TD Et Site Génie Eléctriquejob100% (4)
- MaçonnerieDocument52 pagesMaçonnerieMohandRahim100% (2)
- Le Dictionnaire Visuel Définitions - Être HumainDocument178 pagesLe Dictionnaire Visuel Définitions - Être HumainMoncef PechaPas encore d'évaluation
- 3 1 4 Schema CinematiqueDocument1 page3 1 4 Schema Cinematiquehitachi hadiPas encore d'évaluation
- Cours Meca PDFDocument218 pagesCours Meca PDFMouadBtkPas encore d'évaluation
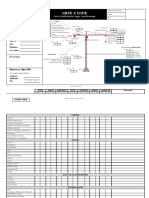
- 13 Insp Grue A Tour FRDocument3 pages13 Insp Grue A Tour FRabdellahPas encore d'évaluation
- TECHNIQUE Tarauder Et FoleterDocument3 pagesTECHNIQUE Tarauder Et Foleterhitachi hadiPas encore d'évaluation
- 150 Ton Crane Load Chart LTM1150-5.1 - Volledige BrochureDocument24 pages150 Ton Crane Load Chart LTM1150-5.1 - Volledige BrochureSai Prasath100% (3)
- Peddinghaus 210 Super 13gDocument25 pagesPeddinghaus 210 Super 13gwwonggPas encore d'évaluation
- Staub GM 428Document15 pagesStaub GM 428giampieroPas encore d'évaluation
- Hisgeo 4am14 2trimDocument1 pageHisgeo 4am14 2trimhitachi hadiPas encore d'évaluation
- Hisgeo 4am16 1trim2Document2 pagesHisgeo 4am16 1trim2hitachi hadiPas encore d'évaluation
- Resume AtomeDocument3 pagesResume Atomehitachi hadiPas encore d'évaluation
- WWW - Cours Gratuit - Com Id 11120Document14 pagesWWW - Cours Gratuit - Com Id 11120ismailPas encore d'évaluation
- Chapitre 2Document54 pagesChapitre 2Fouad DimanePas encore d'évaluation
- 9 Outils MathematiquesDocument2 pages9 Outils Mathematiqueshitachi hadiPas encore d'évaluation
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- 2 Moteur CC Fiche SynteseDocument1 page2 Moteur CC Fiche Syntesehitachi hadiPas encore d'évaluation
- 2nde CoursDocument89 pages2nde CoursfayePas encore d'évaluation
- Formules D'lectrotechniquesDocument2 pagesFormules D'lectrotechniquesHicham CherrabiPas encore d'évaluation
- Electronique Alarme Voiture Avec RadiocommandeDocument1 pageElectronique Alarme Voiture Avec Radiocommandehitachi hadiPas encore d'évaluation
- Exercices MecaniqueDocument9 pagesExercices Mecaniquehitachi hadiPas encore d'évaluation
- Percer Le VerreDocument1 pagePercer Le Verrehitachi hadiPas encore d'évaluation
- Choisir Les AbrasifsDocument1 pageChoisir Les Abrasifshitachi hadiPas encore d'évaluation
- Chap1 LesLoisFondamentalesDuCourantContinuDocument9 pagesChap1 LesLoisFondamentalesDuCourantContinuKouchad FouadPas encore d'évaluation
- Toutes Les Formules 3 - Perimetres Aires Et VolumesDocument1 pageToutes Les Formules 3 - Perimetres Aires Et Volumeshitachi hadiPas encore d'évaluation
- 2 Loi de Coulomb 2020Document43 pages2 Loi de Coulomb 2020hitachi hadi100% (2)
- Sol ChimieDocument10 pagesSol Chimiehitachi hadiPas encore d'évaluation
- DEM - ألعاب الكلمات الفرنسية للإبتدائي و المتوسطDocument23 pagesDEM - ألعاب الكلمات الفرنسية للإبتدائي و المتوسطhitachi hadiPas encore d'évaluation
- Exercices ChimieDocument10 pagesExercices Chimiehitachi hadiPas encore d'évaluation
- EngrDocument3 pagesEngrKawtar BenPas encore d'évaluation
- For Mules EquationsDocument2 pagesFor Mules Equationshitachi hadiPas encore d'évaluation
- Gamme de Porte OutilDocument6 pagesGamme de Porte Outilanime tvPas encore d'évaluation
- Catalogue Humbert 2020Document355 pagesCatalogue Humbert 2020remi GALEA100% (1)
- Poulie Et Courroie1Document8 pagesPoulie Et Courroie1Boris Cathérin Vidjannagni DOHOUPas encore d'évaluation
- Compte Rendus: Préparé Par: Groupe A Encadre ParDocument5 pagesCompte Rendus: Préparé Par: Groupe A Encadre Parmed idrissiPas encore d'évaluation
- Symboles Usinage Apef VDocument3 pagesSymboles Usinage Apef Vp bwPas encore d'évaluation
- Catalogue Fevrier 2015Document67 pagesCatalogue Fevrier 2015PATFPas encore d'évaluation
- INTERCALAIRE N°1 - Liste Des Documents de Référence Du Resp Chantier Génie Climatique 12.03.2019Document1 pageINTERCALAIRE N°1 - Liste Des Documents de Référence Du Resp Chantier Génie Climatique 12.03.2019Matheus Oliveira de FreitasPas encore d'évaluation
- 00-Petit Lexique A ConnaitreDocument13 pages00-Petit Lexique A ConnaitreGaëtan BaudryPas encore d'évaluation
- MR 32679 FRDocument158 pagesMR 32679 FRmebarki aberraoufPas encore d'évaluation
- Chapitre I: Généralité Sur Le ForageDocument8 pagesChapitre I: Généralité Sur Le Foragekoki041996Pas encore d'évaluation
- Fiche TechniqueDocument1 pageFiche TechniqueStyves HarisonPas encore d'évaluation
- Classeur Formation HTB 061026-1Document93 pagesClasseur Formation HTB 061026-1Mahaman kabirouPas encore d'évaluation
- Vue Eclatee RC320TSAWDDocument40 pagesVue Eclatee RC320TSAWDJeremy BaptistePas encore d'évaluation
- PR STAR6P STAR13P E07.10 Intranet PDFDocument116 pagesPR STAR6P STAR13P E07.10 Intranet PDFwalmadasanPas encore d'évaluation
- Devis ChauffageDocument5 pagesDevis Chauffagearezki outaharPas encore d'évaluation
- Rot DDocument336 pagesRot DwalidPas encore d'évaluation
- STRONG-LP 10 SILVER - STRONG - Do You Want To Be Best With Silver - BrochureDocument6 pagesSTRONG-LP 10 SILVER - STRONG - Do You Want To Be Best With Silver - Brochureapi-3695814100% (1)
- P A - Colt-1911Document31 pagesP A - Colt-1911jaiicodnznwPas encore d'évaluation
- NP Bibliographie-ArcherieDocument4 pagesNP Bibliographie-Archeriejean-pierre BuchonPas encore d'évaluation
- Tablas de Recarga .308 Winch-7.62x51NATODocument18 pagesTablas de Recarga .308 Winch-7.62x51NATOStarkenbergPas encore d'évaluation
- TPE Arbres de TransmissionDocument4 pagesTPE Arbres de TransmissionÉliePas encore d'évaluation
- Fiche I Serrage Des Boulons Non - Précontraints SBDocument7 pagesFiche I Serrage Des Boulons Non - Précontraints SBOUSSAMA taibiPas encore d'évaluation
- Catalogue BonnelDocument58 pagesCatalogue BonnelIoan CapraruPas encore d'évaluation
- Liste Nettoyage CuisineDocument4 pagesListe Nettoyage CuisineLaurence DEBERGHPas encore d'évaluation
- 2022 - Doc Type - Fiche Visite TechniqueDocument6 pages2022 - Doc Type - Fiche Visite Techniquelemaire.david54Pas encore d'évaluation