Vous aimerez peut-être aussi
- Plans Dans L'espaceDocument3 pagesPlans Dans L'espacetkdgeoPas encore d'évaluation
- Groupe 1 Juin 1970Document2 pagesGroupe 1 Juin 1970djamilPas encore d'évaluation
- Géom 3 Cours ELEVESDocument5 pagesGéom 3 Cours ELEVESdana.ngaleuPas encore d'évaluation
- La Droite Dans Le Plan: Prince Moulay AbdellahDocument7 pagesLa Droite Dans Le Plan: Prince Moulay AbdellahNechal RihPas encore d'évaluation
- Venezuela Nov - 1965Document2 pagesVenezuela Nov - 1965PRESTY FRANSTHENE KoumbaPas encore d'évaluation
- Cours - de - Mécanique - Appliquée - 1 - SJP-1 - 2016-2017Document47 pagesCours - de - Mécanique - Appliquée - 1 - SJP-1 - 2016-2017Astrid Jizreel100% (1)
- 12 - Géométrie SMDocument10 pages12 - Géométrie SMaziz assiouiPas encore d'évaluation
- Géometrie AnalytiqueDocument9 pagesGéometrie AnalytiqueSoufiane HamidaPas encore d'évaluation
- Chap. III - Calcul Vectoriel Et GeometrieDocument25 pagesChap. III - Calcul Vectoriel Et Geometrietamba vieux tolnoPas encore d'évaluation
- AA1sCh03 Vecteurs-ColineariteDocument11 pagesAA1sCh03 Vecteurs-ColineariteKhalil cheick SavadogoPas encore d'évaluation
- 9.g.ex CH3Document2 pages9.g.ex CH3benjedidiachokri100% (2)
- Infographie Cours 1.psDocument10 pagesInfographie Cours 1.psAbazigalexPas encore d'évaluation
- FRESNELDocument6 pagesFRESNELAbdesslam GuennouniPas encore d'évaluation
- Cours Angles Orientes 1Document5 pagesCours Angles Orientes 1zlimitounePas encore d'évaluation
- Amphi 4 MQDocument43 pagesAmphi 4 MQStéphane WilliamPas encore d'évaluation
- GÉOMÉTRIE ANALYTIQUE PREPARATION DE L'INTERROGATIONDocument5 pagesGÉOMÉTRIE ANALYTIQUE PREPARATION DE L'INTERROGATIONgloirelemba22Pas encore d'évaluation
- Examen Et Bareme GS Math Session Ordinaire FR 2023 Final 1Document9 pagesExamen Et Bareme GS Math Session Ordinaire FR 2023 Final 1Anthony GiragossianPas encore d'évaluation
- Autour Des Équations Du PlanDocument2 pagesAutour Des Équations Du PlanTarik ZiadPas encore d'évaluation
- MCC-TD1 2020Document2 pagesMCC-TD1 2020skipperPas encore d'évaluation
- CCConiquesISA2 12-13Document6 pagesCCConiquesISA2 12-13mohamed ismael toure mohamed ismaelPas encore d'évaluation
- TD 2 FinalDocument4 pagesTD 2 FinalWiem SmidaPas encore d'évaluation
- GeomeuclDocument26 pagesGeomeuclflowerPas encore d'évaluation
- Cours de Mecanique Generale Premiere AnnDocument57 pagesCours de Mecanique Generale Premiere Annmarwen12345Pas encore d'évaluation
- DL 04Document4 pagesDL 04mmPas encore d'évaluation
- S4 - TD4 - Surfaces de R3Document2 pagesS4 - TD4 - Surfaces de R3ilanbruskiPas encore d'évaluation
- Vecteurs de L'espace Cours TS 2020Document7 pagesVecteurs de L'espace Cours TS 2020bouloutouPas encore d'évaluation
- Ch09 - Produit ScalaireDocument2 pagesCh09 - Produit ScalaireManseriPas encore d'évaluation
- Analytique Du Produit ScalaireDocument8 pagesAnalytique Du Produit Scalairetaha INFOPas encore d'évaluation
- Géométrie CHP 2Document6 pagesGéométrie CHP 2Souso El MlihPas encore d'évaluation
- 0 TD Bac - Sujets de Mathematiques, Term SDocument198 pages0 TD Bac - Sujets de Mathematiques, Term S6pzwstc8vfPas encore d'évaluation
- Cours Écrit Algèbre Et Géométrie 2016-2017Document311 pagesCours Écrit Algèbre Et Géométrie 2016-2017Hicham YangPas encore d'évaluation
- Calcul VectorielDocument3 pagesCalcul VectorielKamel HamdiPas encore d'évaluation
- Chap 28 Analyse Vectorielle PDFDocument17 pagesChap 28 Analyse Vectorielle PDFMouhamed SallPas encore d'évaluation
- Angles Orientes Reperage PolaireDocument6 pagesAngles Orientes Reperage Polaireluxiole100% (2)
- Cours Complexes GeometrieDocument9 pagesCours Complexes GeometrieOthniel MeignanPas encore d'évaluation
- Série ComplexeDocument5 pagesSérie ComplexeIyed GhabriPas encore d'évaluation
- Angles Oriente Et TrigonometrieDocument5 pagesAngles Oriente Et TrigonometriememtolombernaPas encore d'évaluation
- 12c 12geometrie AnalytiqueDocument23 pages12c 12geometrie AnalytiqueBenouis YasminePas encore d'évaluation
- TS Droites Et PlansDocument3 pagesTS Droites Et PlansJV DDPas encore d'évaluation
- produit-scalaireDocument12 pagesproduit-scalairekoffi.lael5Pas encore d'évaluation
- Semaine11 MaDocument13 pagesSemaine11 MaKamel OPas encore d'évaluation
- Espace TS3Document10 pagesEspace TS3Naoufel RmiliPas encore d'évaluation
- Cours - DeterminantsDocument17 pagesCours - Determinants6666666666666-545255Pas encore d'évaluation
- Coniques, Quadriques ProjectivesDocument16 pagesConiques, Quadriques ProjectivesdocteurgeroPas encore d'évaluation
- Angles Orientes - Trigonometrie - Old1Document7 pagesAngles Orientes - Trigonometrie - Old1Yannick RoswiloPas encore d'évaluation
- 1999 - 06 - La RéunionDocument3 pages1999 - 06 - La RéunionJérôme EscurePas encore d'évaluation
- Tds Chap1 Meca1 StudentsDocument2 pagesTds Chap1 Meca1 Studentsnelsonfosso910Pas encore d'évaluation
- F8 Equa DiracDocument11 pagesF8 Equa DiracHalima SaouiPas encore d'évaluation
- TS FicheBacS11b Geom-Espace2Document8 pagesTS FicheBacS11b Geom-Espace2Glenn OleguePas encore d'évaluation
- EXERCICE 30.3-: Optique OndulatoireDocument3 pagesEXERCICE 30.3-: Optique OndulatoireChaima HamidiPas encore d'évaluation
- Cours-2-Caractéristiques Géométriques Des Sections PlanesDocument6 pagesCours-2-Caractéristiques Géométriques Des Sections Planesfz bfsPas encore d'évaluation
- Geometrie Espace TDDocument7 pagesGeometrie Espace TDfa0rtjljPas encore d'évaluation
- Sujet de Révision n2_4TechDocument3 pagesSujet de Révision n2_4TechzouzoumotazPas encore d'évaluation
- 11 Geometrie Dans L'espaceDocument9 pages11 Geometrie Dans L'espacebaissane101Pas encore d'évaluation
- Produit Scalaire Dans LespaceDocument3 pagesProduit Scalaire Dans Lespaceapi-302372012Pas encore d'évaluation
- Electromag Partie-02Document20 pagesElectromag Partie-02samiasomatipro23Pas encore d'évaluation
- Chapitre 22 21 02 MDPMDocument47 pagesChapitre 22 21 02 MDPMCrazy ytPas encore d'évaluation
- Maroc Cjuin 1970Document2 pagesMaroc Cjuin 1970djamilPas encore d'évaluation
- La Droite Dans Le Plan Exercices Non Corriges 3 1Document2 pagesLa Droite Dans Le Plan Exercices Non Corriges 3 1Moulay Amine El HadoumiPas encore d'évaluation
- Cours BA ST2 Chap 2Document13 pagesCours BA ST2 Chap 2kimotosPas encore d'évaluation
- Chap 1 Generalites Sur Les Ponts PDFDocument6 pagesChap 1 Generalites Sur Les Ponts PDFLotfiALNemamcha100% (10)
- Etude Du Prix PDFDocument14 pagesEtude Du Prix PDFHanane Deathsoul Hurrican's100% (2)
- Partie 2-2 PDFDocument26 pagesPartie 2-2 PDFBenharzallah KrobbaPas encore d'évaluation
- Méthodes de Dimensionnement Pratiques de Fosses Septiques PDFDocument4 pagesMéthodes de Dimensionnement Pratiques de Fosses Septiques PDFbarouniaminePas encore d'évaluation
- MECANIQUE 2nde F4Document13 pagesMECANIQUE 2nde F4N'ganma0% (1)
- Recrutement APC-ProDocument2 pagesRecrutement APC-ProN'ganmaPas encore d'évaluation
- E-Canevas Pour Contenu Ie GCDocument2 pagesE-Canevas Pour Contenu Ie GCN'ganmaPas encore d'évaluation
- Forces1 PDFDocument12 pagesForces1 PDFAli FousshiPas encore d'évaluation
- Ch12 - Sous ProgrammesDocument9 pagesCh12 - Sous Programmesbenzaied100% (1)
- Le Bac STI Genie CivilDocument8 pagesLe Bac STI Genie Civila.ghani BaRaCuDaPas encore d'évaluation
- Exercices Calcul 3eme 1 CorrigeDocument4 pagesExercices Calcul 3eme 1 CorrigeN'ganmaPas encore d'évaluation
- Les CoffragesDocument6 pagesLes CoffragesN'ganmaPas encore d'évaluation
- Le Dessin TechniqueDocument9 pagesLe Dessin TechniqueN'ganma100% (2)
- 5 Les Dipoles ResistifsDocument6 pages5 Les Dipoles ResistifsN'ganma100% (1)
- Station TotaleDocument3 pagesStation TotaleN'ganmaPas encore d'évaluation
- 03 Notion de Moment TDDocument3 pages03 Notion de Moment TDN'ganmaPas encore d'évaluation
- Beton Arme - Guide de CalculDocument2 pagesBeton Arme - Guide de CalculN'ganmaPas encore d'évaluation
- Les Pont - TexteDocument1 pageLes Pont - TexteN'ganmaPas encore d'évaluation
- 8avril2010 Probleme - Compactage Corrige PDFDocument9 pages8avril2010 Probleme - Compactage Corrige PDFYoussef BouhiaPas encore d'évaluation
- Nouveu Projet 1-TOPO PDFDocument1 pageNouveu Projet 1-TOPO PDFN'ganmaPas encore d'évaluation
- 1 FSpres Gen 9Document4 pages1 FSpres Gen 9N'ganmaPas encore d'évaluation
- Cours Travaux de TerrassementDocument24 pagesCours Travaux de TerrassementElodie Dépré94% (33)
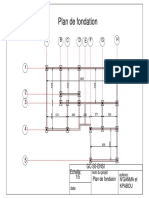
- Dessin1!04!02 20 Présentation1 Fondation PlanDocument1 pageDessin1!04!02 20 Présentation1 Fondation PlanN'ganmaPas encore d'évaluation
- Exercices Calcul 3eme 1Document1 pageExercices Calcul 3eme 1N'ganmaPas encore d'évaluation
- Chap 1 - Ex 2a - Réciproque de Thalès (Progression) - CORRIGEDocument2 pagesChap 1 - Ex 2a - Réciproque de Thalès (Progression) - CORRIGEN'ganmaPas encore d'évaluation
- Chap 1 - Ex 1c - Propriété de Thalès (Problèmes) - CORRIGEDocument2 pagesChap 1 - Ex 1c - Propriété de Thalès (Problèmes) - CORRIGEN'ganmaPas encore d'évaluation
- Exercice Dreux Gorisse PDFDocument13 pagesExercice Dreux Gorisse PDFstoufa73100% (3)
- 1 FSpres Gen 9Document4 pages1 FSpres Gen 9N'ganmaPas encore d'évaluation
- Série Ec PDFDocument2 pagesSérie Ec PDFYassir RochdPas encore d'évaluation
- Moment CinétiqueDocument9 pagesMoment CinétiqueJean AbelaPas encore d'évaluation
- Phys 1 Chap 2 Cinematique ResumeDocument24 pagesPhys 1 Chap 2 Cinematique ResumeHIBAT ERRAHMANE SADOUD100% (1)
- Ref Non GalileenDocument2 pagesRef Non GalileenAlpha KayembePas encore d'évaluation
- 2004 09 Antilles Correction Exo1 Chute 5 5ptsDocument3 pages2004 09 Antilles Correction Exo1 Chute 5 5ptsالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- GMCS073D PDFDocument57 pagesGMCS073D PDFAbdel DaaPas encore d'évaluation
- Torseur Cinematique CorrigeDocument2 pagesTorseur Cinematique CorrigeAmal Fatouh100% (1)
- Fiche Cinematique Du PointDocument2 pagesFiche Cinematique Du PointGuy Ygal100% (5)
- p4 - Correction Des ExercicesDocument7 pagesp4 - Correction Des ExercicesBenjamin JavaudinPas encore d'évaluation
- Série Cinématique 2023Document7 pagesSérie Cinématique 2023nourelhoudajemai961100% (1)
- Série 2 - BDocument14 pagesSérie 2 - Bessadikine anassPas encore d'évaluation
- PHQ114 A4 0Document237 pagesPHQ114 A4 0travail comptePas encore d'évaluation
- Jules VerneDocument20 pagesJules VerneTekitoPas encore d'évaluation
- 95 Resume Meca 2019Document6 pages95 Resume Meca 2019Hicham ZghariPas encore d'évaluation
- Série D'exercices N°7 Lycée Pilote - Physique MOUVEMENT RECTILIGNE - 3ème Sciences Exp (2015-2016) MR MABROUKI SALAH PDFDocument7 pagesSérie D'exercices N°7 Lycée Pilote - Physique MOUVEMENT RECTILIGNE - 3ème Sciences Exp (2015-2016) MR MABROUKI SALAH PDFsendibedPas encore d'évaluation
- Cinematique 1Document4 pagesCinematique 1imaha92Pas encore d'évaluation
- Mpmac Exer Resolu PDFDocument70 pagesMpmac Exer Resolu PDFOumarou Konta100% (1)
- Série Dexercices Corrigés 2Document15 pagesSérie Dexercices Corrigés 2loic100% (1)
- TD m3 PolairesDocument8 pagesTD m3 PolairesredaPas encore d'évaluation
- Rebonds D'une Goutte D'eauDocument8 pagesRebonds D'une Goutte D'eauBacem KakaPas encore d'évaluation
- 1-Etude de Mouvements RectilignesDocument4 pages1-Etude de Mouvements RectilignesboustakatbPas encore d'évaluation
- Partie 2Document5 pagesPartie 2Hamza BoutlihPas encore d'évaluation
- Cinématique 1èreDocument7 pagesCinématique 1èretikongangbazoPas encore d'évaluation
- Cours Geometrie Analytique ModifieeDocument7 pagesCours Geometrie Analytique ModifieeElyes Hajali50% (2)
- Mobile Sur Un Plateau TournantDocument3 pagesMobile Sur Un Plateau TournantIngenieur EnsaPas encore d'évaluation
- Cours MecaniqueDocument43 pagesCours Mecaniqueerrairachid100% (2)
- 2009 09 Polynesie Exo1 Correction Moto 6ptsDocument3 pages2009 09 Polynesie Exo1 Correction Moto 6ptshichammouffakPas encore d'évaluation