Vous aimerez peut-être aussi
- Etude D'un Bâtiment R+9 À Usage Multiple Contreventé Par Un Système Mixte Voiles-PortiquesDocument210 pagesEtude D'un Bâtiment R+9 À Usage Multiple Contreventé Par Un Système Mixte Voiles-PortiquesChristian ZoundjiPas encore d'évaluation
- Application Aux Calculs de La Charge de Ruine de StructureDocument21 pagesApplication Aux Calculs de La Charge de Ruine de Structurelolitta nora50% (2)
- Methode PushoverDocument2 pagesMethode PushoverKuchina SamaPas encore d'évaluation
- Projet EtabsDocument67 pagesProjet Etabsjazmine genie74100% (9)
- Chapitre 12 Dimensionnement Des Poutres-Voiles PDFDocument26 pagesChapitre 12 Dimensionnement Des Poutres-Voiles PDFJennifer F. Matta100% (1)
- Chapitre II - Poteaux en TreillisDocument7 pagesChapitre II - Poteaux en Treillisnobbly 09100% (2)
- Calcul Voiles (BA M1)Document21 pagesCalcul Voiles (BA M1)wansa.ben.mahmoud100% (1)
- Chapitre 02Document48 pagesChapitre 02Sergio RodríguezPas encore d'évaluation
- Chapitre III: L'analyse Push OverDocument20 pagesChapitre III: L'analyse Push OverskylarshinePas encore d'évaluation
- 4 Chapitre 4 Methode Statique EquivalenteDocument9 pages4 Chapitre 4 Methode Statique EquivalenteMan SalahPas encore d'évaluation
- Voilement Par Cisaillement Des Âmes Des Poutres FléchiesDocument9 pagesVoilement Par Cisaillement Des Âmes Des Poutres FléchiesBoubekr Achi100% (1)
- Chapitre 5. Re Méthode Statique Équivalente - CopieDocument13 pagesChapitre 5. Re Méthode Statique Équivalente - CopieWišşãl Benz100% (9)
- Suite en BaDocument18 pagesSuite en Baahmed hmed100% (2)
- Calcul de PORTIQUESDocument7 pagesCalcul de PORTIQUESCyrine Messai100% (1)
- 4 BalconsDocument5 pages4 BalconskaderPas encore d'évaluation
- Projet Charpente Métallique 1Document49 pagesProjet Charpente Métallique 1sabine nouiPas encore d'évaluation
- Exposé de Pushover 2Document5 pagesExposé de Pushover 2ourdia100% (3)
- 03-1 Plancher Mixte AcierDocument38 pages03-1 Plancher Mixte AciersaraPas encore d'évaluation
- Dt0044-Dalle Ba-Poinconnement Sur PoteauDocument28 pagesDt0044-Dalle Ba-Poinconnement Sur PoteauAndreas RagusPas encore d'évaluation
- Module 18 Calcul Des Contreventements PDFDocument3 pagesModule 18 Calcul Des Contreventements PDFZackaria El Idrissi100% (1)
- 11 L'acrotèreDocument5 pages11 L'acrotèremed_archimed100% (6)
- TALEB R CGS JPOGC 08 Calcul Des Structures Selon Le RPA 2003 PDFDocument31 pagesTALEB R CGS JPOGC 08 Calcul Des Structures Selon Le RPA 2003 PDFMohamed Seghir Benzemrane100% (1)
- Rattrapge Parasismique - MAT (2019-2020)Document2 pagesRattrapge Parasismique - MAT (2019-2020)Veronika PrymPas encore d'évaluation
- Etude Comparative Entre Les Deux Méthodes Sismiques Force Latérale Et Analyse ModaleDocument61 pagesEtude Comparative Entre Les Deux Méthodes Sismiques Force Latérale Et Analyse ModaleElias El HachemPas encore d'évaluation
- Etude D'un Batiment Industriel Avec Pont RoulantDocument42 pagesEtude D'un Batiment Industriel Avec Pont RoulantAssef Zraoura100% (1)
- Calcul VoileDocument5 pagesCalcul Voileabdo100% (2)
- Méthode Dynamique Modale SpectraleDocument5 pagesMéthode Dynamique Modale SpectraleOuarab WassimPas encore d'évaluation
- Calcul Des BalconsDocument5 pagesCalcul Des BalconsAkram dzPas encore d'évaluation
- 2 - Dalles MixteDocument74 pages2 - Dalles MixteDavi IsraelPas encore d'évaluation
- TD - Action Du Vent + Bât. Ind. (EX.1)Document14 pagesTD - Action Du Vent + Bât. Ind. (EX.1)lolitta nora100% (2)
- Methode Pour Le Calcul de Dalles ChampignonsDocument9 pagesMethode Pour Le Calcul de Dalles ChampignonsBAMOUROU SANOGO50% (2)
- Ferraillage Des Voiles Et LinteauxDocument9 pagesFerraillage Des Voiles Et Linteauxabdelhak AouadiPas encore d'évaluation
- CH 3 Plancher CollaborantDocument4 pagesCH 3 Plancher CollaborantSam SaaamPas encore d'évaluation
- Cours Beton Precontraint - BisDocument137 pagesCours Beton Precontraint - BisZ.Jocelyn somda100% (2)
- Exemple de Calcul de DimensionnementDocument12 pagesExemple de Calcul de DimensionnementIulia StoianPas encore d'évaluation
- Cours PFC Chapitre IDocument7 pagesCours PFC Chapitre IJasmine YasminePas encore d'évaluation
- Etude Des PortiquesDocument6 pagesEtude Des Portiquesmed jidouPas encore d'évaluation
- Section A Parois MincesDocument5 pagesSection A Parois MincesAbdelkrim JomaaPas encore d'évaluation
- Seance N 1 Exercice Pertes de Precontrainte TirantDocument14 pagesSeance N 1 Exercice Pertes de Precontrainte TirantHakimaNoussair100% (2)
- 15-CHAPITRE 05 Etude SismiqueDocument14 pages15-CHAPITRE 05 Etude SismiqueYoucef SI100% (1)
- Pathologie Des PoutresDocument23 pagesPathologie Des PoutresOmar Omar50% (2)
- Projet Construction Métallique MR NiaziDocument2 pagesProjet Construction Métallique MR NiaziKadiri El MoustaphaPas encore d'évaluation
- Séminaire CGS - RPA 99 Version 2003 - 10, 11 Et 12 Fev 2008Document31 pagesSéminaire CGS - RPA 99 Version 2003 - 10, 11 Et 12 Fev 2008Massi Nissa100% (3)
- Calcul Des VoilesDocument3 pagesCalcul Des Voileskriss100% (1)
- Calcul Des Poteaux Métalliques Selon Le Règlement Algérien C.C.M.97Document72 pagesCalcul Des Poteaux Métalliques Selon Le Règlement Algérien C.C.M.97Chamseddine MerdasPas encore d'évaluation
- Vérifications ELU Et ELS (Poutre 39)Document62 pagesVérifications ELU Et ELS (Poutre 39)Asting elboujidi abdessamadPas encore d'évaluation
- TD Construction Métallique - GC402-DKDocument11 pagesTD Construction Métallique - GC402-DKJunior Baga100% (2)
- Chapitre IV Calcul Des Sollicitations Dans Les VoilesDocument11 pagesChapitre IV Calcul Des Sollicitations Dans Les VoilesFarid Messaad100% (1)
- Calcul Des VoilesDocument27 pagesCalcul Des Voilesnajoua100% (1)
- Calcul Des GoussetsDocument2 pagesCalcul Des Goussetsbastophe100% (2)
- Chapitre 19 - BA Au FeuDocument39 pagesChapitre 19 - BA Au FeuAhmed SkendraouiPas encore d'évaluation
- Moment de Torsion Rectangle PleinDocument10 pagesMoment de Torsion Rectangle PleinphilPas encore d'évaluation
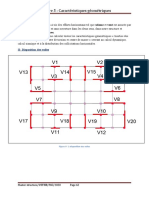
- Chapitre V Caractéristiques GéométriqueDocument9 pagesChapitre V Caractéristiques GéométriqueAmin ZawiPas encore d'évaluation
- Calcul Des StructuresDocument10 pagesCalcul Des Structureslahlou_d9216100% (2)
- Ensa Hociema - Poster - JR21Document4 pagesEnsa Hociema - Poster - JR21ElJanousSoumayaPas encore d'évaluation
- Cours de Cacul Des Structures - Lignes D'influences PDFDocument16 pagesCours de Cacul Des Structures - Lignes D'influences PDFGeotech Nical100% (4)
- Poly-Exam de MecaniqueDocument21 pagesPoly-Exam de MecaniqueLmi LouudPas encore d'évaluation
- 1cm469cd3 223181Document2 pages1cm469cd3 223181ibrahima ndiayePas encore d'évaluation
- Chapitre 2Document52 pagesChapitre 2Yassin ZeghabiPas encore d'évaluation
- Fondation Supérficielle - Justification Portance Sismique - EC8Document8 pagesFondation Supérficielle - Justification Portance Sismique - EC8ABID MohamedPas encore d'évaluation
- Chap4 Decision EthiqueDocument23 pagesChap4 Decision EthiqueRayane RanaPas encore d'évaluation
- Correction Des Exercices de Révisions DDS 1Document8 pagesCorrection Des Exercices de Révisions DDS 1Rayane RanaPas encore d'évaluation
- Chap.2 Fond - ProfondesDocument23 pagesChap.2 Fond - ProfondesRayane RanaPas encore d'évaluation
- Mohamed SOLTANE Prof. Dr. - M1 - ETHIQUE ET DEONTOLOGIE PROP. INTELLECT. - S2 - 2020Document2 pagesMohamed SOLTANE Prof. Dr. - M1 - ETHIQUE ET DEONTOLOGIE PROP. INTELLECT. - S2 - 2020Rayane RanaPas encore d'évaluation
- ch2 Vibrations Forcées Des S.P.D.D. LDocument12 pagesch2 Vibrations Forcées Des S.P.D.D. LRayane RanaPas encore d'évaluation
- CHAPITRE1Document5 pagesCHAPITRE1SI DouPas encore d'évaluation
- Calcul 1Document2 pagesCalcul 1Rayane RanaPas encore d'évaluation
- Exposé M1OH+M1VOA Déontologie, Ethique Et Propriété IntectuelleDocument2 pagesExposé M1OH+M1VOA Déontologie, Ethique Et Propriété IntectuelleRayane RanaPas encore d'évaluation
- Calcul 1nDocument2 pagesCalcul 1nRayane RanaPas encore d'évaluation
- IntroDocument15 pagesIntroRayane RanaPas encore d'évaluation
- Chapitre6 - Escaliers1Document31 pagesChapitre6 - Escaliers1SI DouPas encore d'évaluation
- ch2 Vibrations Forcées Des S.P.D.D. LDocument12 pagesch2 Vibrations Forcées Des S.P.D.D. LRayane RanaPas encore d'évaluation
- Chapitre - PathologieDocument32 pagesChapitre - Pathologiebradbader100% (1)
- Chapitre1 PlanchersDocument26 pagesChapitre1 PlanchersSI Dou100% (1)
- TP FinalDocument3 pagesTP FinalRayane RanaPas encore d'évaluation
- TP 3Document3 pagesTP 3Rayane RanaPas encore d'évaluation
- Systeme D'informationDocument84 pagesSysteme D'informationdsn2008100% (1)
- Chapitre 1 (Suite)Document6 pagesChapitre 1 (Suite)Rayane RanaPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1Rayane Rana100% (1)
- Repères Pédagogiques en ArchitectureDocument45 pagesRepères Pédagogiques en ArchitectureRayane RanaPas encore d'évaluation
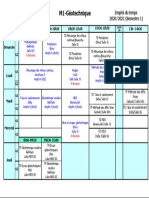
- Emploi Du Temps M1 Géotechnique S1 - 2020 2021Document1 pageEmploi Du Temps M1 Géotechnique S1 - 2020 2021Rayane RanaPas encore d'évaluation
- Chapitre 4 Réseaux Et FlotsDocument3 pagesChapitre 4 Réseaux Et FlotsRayane RanaPas encore d'évaluation
- Serie N°3 Programmation 2021Document2 pagesSerie N°3 Programmation 2021Rayane RanaPas encore d'évaluation
- Repères Pédagogiques en ArchitectureDocument45 pagesRepères Pédagogiques en ArchitectureRayane RanaPas encore d'évaluation
- Serie TD 3 2020 2021Document2 pagesSerie TD 3 2020 2021Rayane RanaPas encore d'évaluation
- Série TD 2 2020 2021Document2 pagesSérie TD 2 2020 2021Rayane RanaPas encore d'évaluation
- Serie TD 3 2020 2021Document2 pagesSerie TD 3 2020 2021Rayane RanaPas encore d'évaluation
- Série TD 1 2020 2021Document2 pagesSérie TD 1 2020 2021Rayane RanaPas encore d'évaluation
- Série TD 1 2020 2021Document2 pagesSérie TD 1 2020 2021Rayane RanaPas encore d'évaluation
- Principes de Base IrDocument40 pagesPrincipes de Base IrBellarguet Faouzi fawziPas encore d'évaluation
- Corps NoirDocument21 pagesCorps NoirKhaoula LakhfifPas encore d'évaluation
- Géotechnique Pont PFEDocument72 pagesGéotechnique Pont PFEAhmed El EuchiPas encore d'évaluation
- Impact Des Murs de Remplissage en Maçonnerie Sur LeDocument243 pagesImpact Des Murs de Remplissage en Maçonnerie Sur LeMãrielle ĴøřgeñseñPas encore d'évaluation
- Cours SoudageDocument29 pagesCours Soudageibtihaj moulouad50% (2)
- Chapitre 2Document19 pagesChapitre 2islam oo100% (1)
- 109 Bael Faessel Mars09Document2 pages109 Bael Faessel Mars09vedranPas encore d'évaluation
- Diagramme de Lair Humide CosticDocument4 pagesDiagramme de Lair Humide Costicahmed chakrounPas encore d'évaluation
- Installations Fluidiques Et ThermiquesDocument8 pagesInstallations Fluidiques Et Thermiquessaif amriPas encore d'évaluation
- Corrigé Devoir de Contrôle N°1: ChimieDocument2 pagesCorrigé Devoir de Contrôle N°1: ChimieRiadh Marouani100% (1)
- Les Essais MécaniqueDocument95 pagesLes Essais Mécaniqueyoussef DhissiPas encore d'évaluation
- Traitement Thermique VF-CPR2-2017-2018Document55 pagesTraitement Thermique VF-CPR2-2017-2018HOUSSAME NAIMPas encore d'évaluation
- Partie II-Physique - Electricté - UPAB - 2022Document14 pagesPartie II-Physique - Electricté - UPAB - 2022alasanec392Pas encore d'évaluation
- Chapitre 3 Traction Et Compression PDFDocument7 pagesChapitre 3 Traction Et Compression PDFMaha KarrayPas encore d'évaluation
- TH4887Document158 pagesTH4887KEVIIN JOEL YONDJEU FEUBOPas encore d'évaluation
- Développement D'une Méthode de Simulation Du Comportement en Fatigue de Pièces Minces en Alliage D'aluminium Soumises À de La Corrosion Par PiqûresDocument229 pagesDéveloppement D'une Méthode de Simulation Du Comportement en Fatigue de Pièces Minces en Alliage D'aluminium Soumises À de La Corrosion Par Piqûres344dv998Pas encore d'évaluation
- Séance 10 - P3 - CH2Document18 pagesSéance 10 - P3 - CH2Mohsine DriowyaPas encore d'évaluation
- Charpente MétalliqueDocument1 pageCharpente MétalliqueAd EmPas encore d'évaluation
- TheseDocument161 pagesTheseZaki La ColombePas encore d'évaluation
- Physico Chimie Des Lubrifiants Amp Theorie de La Lubrification P 87 A 89Document6 pagesPhysico Chimie Des Lubrifiants Amp Theorie de La Lubrification P 87 A 89AdikoDenzeyAnonh100% (1)
- Projet DiagnosticDocument30 pagesProjet Diagnosticamrisalma72Pas encore d'évaluation
- rdm2 - Cours - 1-Sollicitations Composées (Simples)Document22 pagesrdm2 - Cours - 1-Sollicitations Composées (Simples)all of asPas encore d'évaluation
- Biophysique Solutions ÉlectrolytiquesDocument15 pagesBiophysique Solutions ÉlectrolytiquesNabil holmes100% (3)
- PC1ere CD - P6,5 Champ ElestrostatiqueDocument9 pagesPC1ere CD - P6,5 Champ ElestrostatiqueAdopo100% (1)
- Chap 02 - Le Champs Electrique DiaposDocument23 pagesChap 02 - Le Champs Electrique Diaposluffycapitaine0221Pas encore d'évaluation
- Chapitre 2: Les Séismes Et Leur Relation Avec La Tectonique Des PlaquesDocument46 pagesChapitre 2: Les Séismes Et Leur Relation Avec La Tectonique Des PlaquesHamid BerradiPas encore d'évaluation
- حسينDocument15 pagesحسينhoussam badriPas encore d'évaluation
- Cours MASDocument22 pagesCours MASFlame KaiserPas encore d'évaluation
- Meca Flu td2Document3 pagesMeca Flu td2ZXhPas encore d'évaluation
- TP Bois GC4Document9 pagesTP Bois GC4Nick Jordan KEMBOU WOUNTSAPas encore d'évaluation