Vous aimerez peut-être aussi
- 03 Chapitre 1Document5 pages03 Chapitre 1Firas FirasPas encore d'évaluation
- Grafcet 5Document2 pagesGrafcet 5Tarek MehdidPas encore d'évaluation
- TD3 - Automatisme IndustrielDocument7 pagesTD3 - Automatisme IndustrielFifi La MarionnettePas encore d'évaluation
- td1 AutomatismeDocument6 pagestd1 AutomatismeDhoha GasmiaPas encore d'évaluation
- ChariotsDocument2 pagesChariotskhalid elmarzakPas encore d'évaluation
- Série de TD N-1Document2 pagesSérie de TD N-1khaled kamel BouabdallahPas encore d'évaluation
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 pagesCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliPas encore d'évaluation
- DC Automatisme 2020 Et CorrigéDocument5 pagesDC Automatisme 2020 Et CorrigéIslemePas encore d'évaluation
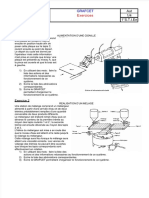
- Automatisation D'une Cisaille Systeme Etudie Alimentation D'Une CisailleDocument10 pagesAutomatisation D'une Cisaille Systeme Etudie Alimentation D'Une CisailleMăř ØűãPas encore d'évaluation
- Exercice Corrigé Du Grafcet LinéaireDocument4 pagesExercice Corrigé Du Grafcet LinéaireZOUHAIR EL-KHAIRANI100% (1)
- Grafcet 2as-2021Document66 pagesGrafcet 2as-2021Mustafa SemmaaPas encore d'évaluation
- ANALYSE DESCENDANT (Ex)Document4 pagesANALYSE DESCENDANT (Ex)Med FilaliPas encore d'évaluation
- Fiche TD 2 - 3 - 4 - Avec Solution-ConvertiDocument11 pagesFiche TD 2 - 3 - 4 - Avec Solution-ConvertiDINE HABIBEPas encore d'évaluation
- ESA - TP FFs - Juin'10Document122 pagesESA - TP FFs - Juin'10mustapha bougharioun100% (1)
- TD1 API Electromecanique4Document3 pagesTD1 API Electromecanique4Ahmed Ben MustaphaPas encore d'évaluation
- TD Grafcet PDFDocument10 pagesTD Grafcet PDFlahssane hmidatPas encore d'évaluation
- Exam API Seer-Gecsi 2020-2021Document4 pagesExam API Seer-Gecsi 2020-2021Safae AbdelmounimPas encore d'évaluation
- 05exercices GrafcetDocument4 pages05exercices Grafcetnajlae alfathiPas encore d'évaluation
- TD Grafcet EmiDocument26 pagesTD Grafcet EmibrahimPas encore d'évaluation
- td3 APIDocument2 pagestd3 APIعثمان عثمانPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFDocument4 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFAkram Ben Khemis50% (2)
- Grafcet Synchronisé: I - Description Du SystèmeDocument4 pagesGrafcet Synchronisé: I - Description Du SystèmeNou Ha BenabdallahPas encore d'évaluation
- Devoir de Controle N1-2as-2022Document4 pagesDevoir de Controle N1-2as-2022GR GARMANI100% (2)
- TD 2 Automates Programmables Industriels 2020 - 2021Document2 pagesTD 2 Automates Programmables Industriels 2020 - 2021adamPas encore d'évaluation
- Cours 12 Exemples Grafcet Et GEMMADocument7 pagesCours 12 Exemples Grafcet Et GEMMAimen mehri100% (3)
- Exercices Grafcet 2 STSDocument7 pagesExercices Grafcet 2 STSsaulnierPas encore d'évaluation
- Exercises Grafcet CorrigesDocument4 pagesExercises Grafcet CorrigesLuk Grijan100% (1)
- Énoncés Des SujetsDocument17 pagesÉnoncés Des SujetsTarek Mehdid100% (2)
- Présentation Du SujetDocument2 pagesPrésentation Du SujetMohsen Saidi100% (1)
- Automatisme - L3-Eai-Elm - Exercices D'introduction Au GrafcetDocument4 pagesAutomatisme - L3-Eai-Elm - Exercices D'introduction Au GrafcetKing CyrusPas encore d'évaluation
- TD Api05022019Document10 pagesTD Api05022019Mohamed FathallahPas encore d'évaluation
- Exercice Chariots PDFDocument2 pagesExercice Chariots PDFAhmed Bnzi100% (1)
- Examen-Corr GrafcetDocument4 pagesExamen-Corr GrafcetFatimazahrae AB100% (1)
- GRAFCET D'un Point de Vue PCDocument3 pagesGRAFCET D'un Point de Vue PCkhocine50% (2)
- Grafcet TDDocument5 pagesGrafcet TDWided MaghraouiPas encore d'évaluation
- TD GRAFCET 3ème ST 2010Document4 pagesTD GRAFCET 3ème ST 2010Charaf LeoPas encore d'évaluation
- TD2 Sur Chapitre 2. Le GrafcetDocument7 pagesTD2 Sur Chapitre 2. Le GrafcetMa Jhoul0% (1)
- TD PneumatiqueDocument12 pagesTD PneumatiqueOussama EljaafariPas encore d'évaluation
- TP 01-API .L3 AutomatiqueDocument19 pagesTP 01-API .L3 Automatiqueothmane ABDELADIMPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiDocument6 pagesDevoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiamaniPas encore d'évaluation
- Ars2 TD12Document2 pagesArs2 TD12mauricetappa100% (2)
- Exercices GrafcetDocument5 pagesExercices GrafcetHamza AbourifaaPas encore d'évaluation
- 1-Principe de Programmation LadderDocument14 pages1-Principe de Programmation LadderkAMELPas encore d'évaluation
- Upload - Série D'exercices N°3-4tech-GRAFCET-2014-2015-CorrectionDocument2 pagesUpload - Série D'exercices N°3-4tech-GRAFCET-2014-2015-CorrectionRania Ben HassinePas encore d'évaluation
- TP2 automatismeLAIIDocument6 pagesTP2 automatismeLAIIfakhri menjliPas encore d'évaluation
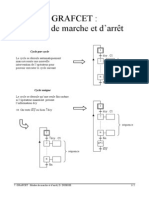
- Mode de Marche D'arrêtDocument2 pagesMode de Marche D'arrêtGasmi Mostapha El HadiPas encore d'évaluation
- Feuille n7 Grafcet PDFDocument4 pagesFeuille n7 Grafcet PDFntabPas encore d'évaluation
- Fascicule TP SEDDocument35 pagesFascicule TP SEDAkram Del Rio100% (1)
- GE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Document2 pagesGE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Rabah Amidi100% (1)
- Cours Grafcet Tscira 2016Document33 pagesCours Grafcet Tscira 2016El Hasnaoui YsfPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI RaoufDocument4 pagesDevoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI Raoufchaouachi alarbiPas encore d'évaluation
- TD2 Sciage ProfilesDocument2 pagesTD2 Sciage ProfilesDlasri Jamal50% (4)
- tp1 Elc de PuissanceDocument14 pagestp1 Elc de PuissanceYahiyaoui Sofyane100% (1)
- CC N1 Automatisme 2 Roi 4 2021 PDFDocument3 pagesCC N1 Automatisme 2 Roi 4 2021 PDFHarry Tl100% (3)
- 06 GrafcetDocument28 pages06 Grafcetamine milanoPas encore d'évaluation
- Grafcet Transfert de PiecesDocument2 pagesGrafcet Transfert de PiecesBrahim Achayfad83% (6)
- Travaux DirigesDocument19 pagesTravaux DirigesHyacinthe KossiPas encore d'évaluation
- Cours1 GrafCetDocument11 pagesCours1 GrafCetautoman_dzPas encore d'évaluation
- Grafcet1 Notions Base-ConvertiDocument8 pagesGrafcet1 Notions Base-ConvertiÁł ÃăPas encore d'évaluation
- ZC6 Labo 1 2017Document2 pagesZC6 Labo 1 2017JasminPas encore d'évaluation
- Labo 2Document9 pagesLabo 2JasminPas encore d'évaluation
- Terminologie Associee Aux GRAFCETsDocument9 pagesTerminologie Associee Aux GRAFCETsJasminPas encore d'évaluation
- Labo 2Document9 pagesLabo 2JasminPas encore d'évaluation
- Introduction Au GrafcetDocument19 pagesIntroduction Au GrafcetJasminPas encore d'évaluation
- ZC6 Labo 5 2021Document5 pagesZC6 Labo 5 2021JasminPas encore d'évaluation
- ZC6 Labo 4 2021Document4 pagesZC6 Labo 4 2021JasminPas encore d'évaluation
- ZC6 Labo 5 2019 Rev1Document4 pagesZC6 Labo 5 2019 Rev1JasminPas encore d'évaluation
- ZC6 Labo 6 2017Document4 pagesZC6 Labo 6 2017JasminPas encore d'évaluation
- Le Serveur D'impression Avec Windows Server 2019Document16 pagesLe Serveur D'impression Avec Windows Server 2019Mohamed MessbahPas encore d'évaluation
- Application Informatique Pour Le Calcul Du Temps Et Coût D'usinage Des Pièces en Fraisage Et en TournageDocument82 pagesApplication Informatique Pour Le Calcul Du Temps Et Coût D'usinage Des Pièces en Fraisage Et en TournageppePas encore d'évaluation
- ClimatisationDocument35 pagesClimatisationJo100% (1)
- compte rendu - نسخةDocument4 pagescompte rendu - نسخةyoucefPas encore d'évaluation
- FinalProblèmes À Satisfaction de ContraintesDocument238 pagesFinalProblèmes À Satisfaction de ContraintesAhlem Essefi100% (1)
- CV Auto EvaluationDocument11 pagesCV Auto EvaluationAlexandra Sascha Badila SterckPas encore d'évaluation
- Fiche Evaluation À ChaudDocument2 pagesFiche Evaluation À Chaudqualite consultingPas encore d'évaluation
- PLAN DE MAINTENANCE PREVENTIVE ModéleDocument8 pagesPLAN DE MAINTENANCE PREVENTIVE ModéleGhaith Soudani100% (3)
- Fiche D'Inscription Pedagogique 2022-2023: Identification FormationDocument2 pagesFiche D'Inscription Pedagogique 2022-2023: Identification FormationDokrissa KAMINAPas encore d'évaluation
- ATHEBA - 3f - Les Murs Dans Le Bâti AncienDocument4 pagesATHEBA - 3f - Les Murs Dans Le Bâti AncienMichel WalkowiakPas encore d'évaluation
- CV Gestionnaire PaieDocument1 pageCV Gestionnaire PaiesandycpassyPas encore d'évaluation
- PFE LoubnaDocument22 pagesPFE LoubnaJeliel AzuritePas encore d'évaluation
- Cours Architecture IOT 3Document17 pagesCours Architecture IOT 3Sourour JellaliPas encore d'évaluation
- Cours S5 Chap1Document88 pagesCours S5 Chap1Boutouil HassanPas encore d'évaluation
- Pr. Elhassani S6 Economie Gestion Support Cours SPSSDocument82 pagesPr. Elhassani S6 Economie Gestion Support Cours SPSSPenipu CeoPas encore d'évaluation
- Devoir Deux VersionsDocument8 pagesDevoir Deux VersionsTou MatwiPas encore d'évaluation
- Support Superviseur DTM - 2Document4 pagesSupport Superviseur DTM - 2Mahrouz MadoPas encore d'évaluation
- TP MbakidiDocument10 pagesTP Mbakidifrancis luminguPas encore d'évaluation
- BT SB 1 À 3 PROGRESSIONDocument19 pagesBT SB 1 À 3 PROGRESSIONbognonPas encore d'évaluation
- Qualité 4.0Document146 pagesQualité 4.0trabelsiPas encore d'évaluation
- Sbec22525210frr0 1Document25 pagesSbec22525210frr0 1BrotherPas encore d'évaluation
- 612ba5755f98btransmission Bts Blanc 2017 Filiere Reseau InformaDocument2 pages612ba5755f98btransmission Bts Blanc 2017 Filiere Reseau InformaUlrich JordanPas encore d'évaluation
- FR DBMOTEURS Volvo Penta PDFDocument102 pagesFR DBMOTEURS Volvo Penta PDFHøc ÎnęPas encore d'évaluation
- Devoir WordDocument10 pagesDevoir WordJonathan FrédéricPas encore d'évaluation
- TABE Minco Maquinarias ChileDocument13 pagesTABE Minco Maquinarias ChileNelson Andrade VelasquezPas encore d'évaluation
- Beep Error Code - LENOVO - Toutes Les Idea Pad LaptopsDocument3 pagesBeep Error Code - LENOVO - Toutes Les Idea Pad LaptopsRazafimamonjy Elie J HerminotPas encore d'évaluation
- C. Difficile Clostridium Difficile: Glossaire - Technique Radiologique AcronymesDocument3 pagesC. Difficile Clostridium Difficile: Glossaire - Technique Radiologique AcronymesSlim MâamerPas encore d'évaluation
- Résolution de TriangleDocument3 pagesRésolution de TriangleHaifaHaifaPas encore d'évaluation
- CAT Groupes Electrogenes FDocument20 pagesCAT Groupes Electrogenes Filham28683% (6)
- Notions D'oracleDocument53 pagesNotions D'oracleTIEHO LEOUAPas encore d'évaluation