Académique Documents
Professionnel Documents
Culture Documents
Unidad I
Transféré par
jarkan881500Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Unidad I
Transféré par
jarkan881500Droits d'auteur :
Formats disponibles
UNIDAD I 1
UNIDAD I
INTRODUCCION A LOS SISTEMAS DE CONTROL
1.1 INTRODUCCION
El control automático es esencial en el control numérico de las máquinas – herramientas de las
industrias de manufactura, en el diseño de sistemas de pilotos automáticos en la industria aeroespacial, y
en el diseño de automóviles y camiones en la industria automotriz. También es esencial en las
operaciones industriales como el control de presión, temperatura, humedad, viscosidad y flujo en las
industrias de proceso.
El control automático consta de un proceso en el que se trata de ajustar un parámetro a una
referencia. Este dispositivo automático capaz de gobernar el funcionamiento de una máquina o un
proceso se denomina controlador o regulador.
El control automático ha sido fundamental para el desarrollo de la ingeniería y es de extrema
importancia en los siguientes temas:
¾ Tecnología espacial
¾ Sistemas robóticos
¾ Sistemas bélicos Control de temperatura
¾ Procesos industriales Control de presión
¾ Diseño automotriz Control de flujo
¾ Sistemas económicos Control de nivel
En la práctica el control automático aporta medios para optimizar los sistemas dinámicos,
mejorar la productividad y encargarse de operaciones repetitivas y rutinarias.
PANORAMA HISTORICO
JAMES WATT: regulador de velocidad centrífuga, para el control de velocidad de una
máquina de vapor, en el siglo XVIII.
1922, MINORSKY trabajó en los controladores para dirigir embarcaciones.
1932, NYQUIST diseño un procedimiento relativamente simple para determinar la
estabilidad de los sistemas en lazo cerrado.
1934, HAZEN quién introdujo el término servomecanismo para los sistemas de control de
posición.
DECADA DE LOS 40, método de la respuesta en frecuencia.
A FINES DE LOS 40 Y COMIENZO DE LOS 50, se desarrolla por completo el método
del lugar de las raíces.
DESDE 1960, con la disponibilidad de las computadoras digitales se hizo posible el
análisis en el dominio del tiempo de sistemas complejos.
ENTRE 1960 y 1980, se investigaron a fondo los sistemas tanto determinísticos como
estocásticos.
Las aplicaciones recientes de la teoría de control moderna incluyen sistemas ajenos a la
Ingeniería, como los Biológicos, Económicos y Socioeconómicos.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 2
DEFINICIONES: antes de analizar los sistemas de control, deben definirse ciertos términos
básicos.
¾ VARIABLE CONTROLADA Y VARIABLE MANIPULADA: la variable controlada es la
cantidad o condición que se mide y controla (salida). La variable manipulada es la
cantidad o condición que el controlador modifica para afectar el valor de la variable
controlada.
¾ PLANTAS: cualquier objeto físico que se va a controlar (tal como un dispositivo
mecánico, un horno de calefacción, un reactor químico o una nave espacial).
¾ PROCESOS: cualquier operación que se va a controlar, como los procesos químicos,
económicos y biológicos.
¾ SISTEMAS: combinación de componentes que actúan juntos y realizan un objetivo
determinado. Un sistema no necesariamente es físico.
¾ PERTURBACIONES: una perturbación es una señal que tiende a afectar negativamente
el valor de la salida de un sistema. Si la perturbación se genera dentro del sistema se
denomina interna, en tanto que una perturbación externa se produce fuera del sistema y
es una entrada.
¾ CONTROL REALIMENTADO: se refiere a una operación que en presencia de
perturbaciones, tiende a reducir la diferencia entre la salida de un sistema y alguna
entrada de referencia y lo continúa haciendo con base en esta diferencia.
1.2 EJEMPLO DE UN SISTEMA DE CONTROL:
CONVERTIDOR INTERFASE
A/D
HORNO
ELECTRICO
ENTRADA
RELEVADOR AMPLIFICADOR PROGRAMADA
INTERFASE
FIGURA Nº 1.1 SISTEMA DE CONTROL DE TEMPERATURA
SISTEMA DE CONTROL DE TEMPERATURA
La figura muestra un diagrama esquemático del control de temperatura de un horno eléctrico.
La temperatura del horno se mide mediante un termómetro, que es un dispositivo analógico. Esta se
convierte en una temperatura digital mediante un convertidor A/D. La temperatura digital se introduce a
un controlador mediante una interface. Esta temperatura digital se compara con una temperatura que se
ingresa mediante un programa y si hay una discrepancia (error), el controlador envía una señal al
calefactor, a través de una interface, un amplificador y un relevador, para hacer que la temperatura del
horno adquiera el valor deseado.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 3
1.3 CONTROL EN LAZO CERRADO EN COMPARACIÓN CON EL CONTROL EN LAZO
ABIERTO.
SISTEMAS DE CONTROL REALIMENTADOS.
Un sistema que mantiene la relación prescrita entre la salida y la entrada de referencia,
comparándolas y usando la diferencia como medio de control, se denomina sistema de control
realimentado.
SISTEMAS DE CONTROL EN LAZO CERRADO
Los sistemas de control realimentados se denominan también sistemas de control en lazo
cerrado. El termino control en lazo cerrado siempre implica el uso de una acción de control realimentado
para reducir el error del sistema.
SISTEMAS DE CONTROL EN LAZO ABIERTO
Los sistemas en los cuales la salida no afecta la acción de control se denominan sistemas de
control en lazo abierto en otras palabras en un sistema de control en lazo abierto no se mide la salida ni
se realimenta para comparar con la entrada.
VENTAJAS DE LOS SISTEMAS DE CONTROL EN LAZO ABIERTO
1. Una construcción sencilla y un mantenimiento fácil.
2. Son menos costosos que un sistema equivalente en lazo cerrado.
3. No existe el problema de estabilidad.
4. Son convenientes cuando es difícil medir la salida o no son factibles en el aspecto
económico.
DESVENTAJAS DE LOS SISTEMAS DE CONTROL EN LAZO ABIERTO
1. Las perturbaciones y los cambios en la calibración provocan errores y la salida puede ser
diferente de lo que se busca.
2. Para conservar la calidad requerida en la salida, es necesaria una recalibración de vez en
cuando.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 4
1.4 REPASO NUMEROS COMPLEJOS
Ö X2+1 = 0, no tiene solución en ℜ
Ö X2 = − 1 /
Ö X= (− 1)
Ö X = i, unidad imaginaria [j en ingeniería]
1.4.1 POTENCIAS
Ö j= (− 1)
2 En general tenemos:
Ö j = -1
Ö j3 = -j j 4× k + n = j n
Ö j4 = 1
1.4.2 DESCRIPCIÓN GRAFICA
Z = a+jb
ℑ
Ö Z = Magnitud ∠ fase
(a )
Z(a,b)
b
Ö Z = 2
+ b2
Ö ( )
φ = tg −1 b a
Ö Z = Z cos φ + j Z senφ
a ℜ
1.4.3 PROPIEDADES
Ö Z = a − jb , conjugado Ejemplo: sea Z1 = 3+4j y Z2=2 - j
Ö Z −1 = Z Z 1 = 3 - 4j
Z Z1 ± Z2 = 5+3j
Ö Si Z1 = a+jb, y Z2 = c+jd Z1 × Z2 = 10 + 5j
Z1
Ö Z1 ± Z2 = (a ± c)+j(b ± d) = Z1 × Z 2−1 = Z1 × Z 2 = 0.4+2.2j
Z2 Z2
Ö Z1 × Z2 = (ac - bd)+j(ad + bc) Z1 = 5
φ = 53.1°
Z1
Ö = Z1 × Z 2−1 gráfico plano z
Z2
1.5 INTRODUCCIÓN A LA TRANSFORMADA DE LAPLACE
1.5.1 VARIABLE COMPLEJA
s= σ + jω
Variable Compleja Parte real Parte Imaginaria
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 5
1.5.2 FUNCIÓN COMPLEJA
F (s) = (F
2
X + FY2 )
φ = tg −1 ⎛⎜ FY F ⎞⎟
F(s) = FX + j FY
⎝ X ⎠
Las funciones complejas generalmente se encuentran en el análisis de sistemas de control
lineales. [Una función compleja G(s) es analítica en el plano “s”, si G(s) y todas sus derivadas existen en
tal región]
1.5.3 TEOREMA DE EULER
Expansión de series de potencia de cos ϑ y sen ϑ :
ϑ2 ϑ4 ϑ6
Ö cos ϑ = 1− + − +K
2! 4! 6!
ϑ3 ϑ5 ϑ7
Ö sen ϑ = ϑ− + − +K
3! 5! 7!
ϑ2 ϑ3 ϑ4 ϑ5
Entonces cos ϑ +j sen ϑ = 1 + jϑ − −j +K + +j
2! 4! 5! 3!
= 1 + jϑ +
( jϑ )2 + ( jϑ )3 + ( jϑ )4 + K
2! 3! 4!
Por otro lado:
e X
= 1+ X +
( X ) (X ) (X )
2
+
3
+
4
+K
2! 3! 4!
TEOREMA DE EULER:
ej ϑ = cos ϑ +j sen ϑ
Ö e-j θ = cos ϑ - j sen ϑ , complejo conjugado de ej ϑ
Se deduce del teorema de Euler:
Ö cos ϑ =
1 Jϑ
2
(
e + e − Jϑ )
Ö sen ϑ =
1 Jϑ
2j
(
e − e − Jϑ )
1.5.4 LA TRANSFORMADA DE LAPLACE
f(t) = función en dominio del tiempo t tal que f(t) =0 ∀ t<0
s = Variable compleja
ℒ = Operador lineal que indica que la cantidad que la antecede se va a transformar
mediante la integral de laplace
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 6
F(s) = Transformada de laplace de f(t)
DEFINICION DE LA TRANSFORMADA DE LAPLACE
∞
∫ f (t ) × e
− st
ℒ [ f(t) ] = F(s) = dt
0
DEFINICION DE LA TRANSFORMADA INVERSA DE LAPLACE
∞
1
2πj −∫∞
ℒ-1 [ F(s) ] = f(t) = F ( s ) × e st dt
PROPIEDADES
ℒ [ A × f(t) ] = A × ℒ [ f(t) ]
ℒ [ f1(t) + f2(t)] = ℒ [f1(t)]+ ℒ [f2(t)]
TEOREMA DE DIFERENCIACIÓN
d
ℒ[ f(t)] = s F(s) – f(0), donde f(0) es el valor inicial de f(t) evaluado en t = 0
dt
d2
ℒ[ 2
f(t)] = s2 F(s) – s f(0) – f’ (0)
dt
Generalizando:
dn
ℒ[ f(t)] = sn F(s) – sn-1 f(0) – sn-2 f’(0) – K – s f(n-2) (0) – f(n-1) (0)
dt n
1.5.4.1 FUNCION ESCALÓN
0 ∀t < 0
f(t)
A ∀ t > 0, A = Cte., no está definida en t = 0
1
∞
A
∫ A× e
− st
ℒ [ f(t) ] = dt =
0
s t
1
Ö A = 1, función escalón unitario ℒ [ µ(t) ] =
s
1.5.4.2 FUNCION RAMPA
0 ∀t < 0
r(t)
At ∀t ≥ 0 m=A
∞
A
∫ At × e
− st
ℒ [ r(t) ] = dt =
0 s2 t
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 7
1.5.4.3 FUNCION SENO y COSENO
Aω As
ℒ [ A sen (wt)] = , ℒ [ A cos (wt)] =
s +ω2
2
s +ω22
1.5.4.4 FUNCION PULSO
A 0 < t < t0 A
f(t) t0
0 t < 0, t > t0
ℒ [ f(t) ] =
A
t0 s
(1 − e − st0 ) t0 t
1.5.4.5 FUNCION IMPULSO UNITARIO
1 0 t < ∆t
δ (t )
∆t
f(t)
∆t − ∆t + t
0 ∀t ≠ 0
La altura del impulso (magnitud) es A/ ∆ t, donde ∆ t es la duración del impulso
El área del impulso es 1. Si ∆ t Æ 0 => la altura A / ∆ tÆ ∞ , pero el área sigue siendo 1
ℒ [ δ (t) ] = 1
1.5.4.6 FUNCION DESPLAZAMIENTO
ℒ[ f (t − α ) ] = e −αs F (s )
∞
ℒ[ e
−αt
f (t ) ] = ∫ e −αt f (t )e − st dt = F ( s + α )
0
EJEMPLO:
−αt ω
ℒ[ e sen(ωt ) ] =
(s + α )2 + ω 2
1.5.5 LA TRANSFORMADA INVERSA DE LAPLACE
No se recomienda el uso de la integral de inversión para determinar transformadas inversas de
Laplace de funciones que generalmente se encuentran en ingeniería de control.
Se recomienda el uso de tablas ó expandir la función F(s) en fracciones parciales y escribir en
términos de funciones simples de s para las cuales ya se conocen las trasformadas inversas de laplace.
Num( s) B ( s )
Se tiene F(s) = =
Den( s) A( s )
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 8
Donde Num (s) y Den (s) son polinomios en función de la variable s. La potencia más alta de s
Den(s) debe ser mayor que la potencia más alta de s en Num(s), de lo contrario se debe dividir para
producir un polinomio de s más un residuo.
Num( s) k ( s + z1 )( s + z 2 ) K ( s + z m )
F(s) = = , m<n
Den( s) ( s + p1 )( s + p 2 ) K ( s + p n )
C1 C2 Cn
F(s)= + +K+ ,
s + p1 s + p 2 s + pn
⎡ B (s )⎤
Donde C k = ⎢(s + p k ) ⎥
A (s )⎦
s = − pk
⎣
Ck
ℒ-1 [ ] = C k e − pk t
s + pk
EJEMPLO
s+3
1. F(s) = , determinar f(t)
(s + 1)(s + 2)
La expansión en fracciones parciales de F(s) es:
s+3 C1 C2
F ( s) = = +
(s + 1)(s + 2) (s + 1) (s + 2)
⎡ s+3 ⎤ ⎡ s + 3⎤
C1 = ⎢(s + 1) =⎢ =2
⎣ (s + 1) (s + 2)⎥⎦ s = −1
⎣s + 2⎦
⎥ s = −1
⎡ s+3 ⎤ ⎡ s + 3⎤
C 2 = ⎢ (s + 2 ) =⎢ = −1
⎣ (s + 1) (s + 2)⎥⎦ s = −2
⎣ s +1⎦
⎥ s = −2
Luego: f (t) =ℒ-1 [F(s)] =
⎡ 2 ⎤ -1 ⎡ 1 ⎤
= ℒ-1 ⎢ (s +1)⎥ - ℒ ⎢ (s + 2) ⎥
⎣ ⎦ ⎣ ⎦
Finalmente: = 2 • e − t − e −2t
Nota: raíces complejas conjugadas no se recomienda expandir en fracciones parciales. Se
recomienda expandirla en la suma de una función seno y coseno amortiguada.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 9
Tabla Nº 1.1: Pares de Transformadas de Laplace
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
UNIDAD I 10
Tabla Nº 1.2: Propiedades de la Transformada de Laplace
BIBLIOGRAFÍA
9 Ogata, Katsuhiko, Ingeniería de Control Moderna.
9 Apuntes Personales U. A.
9 www.control-automatico.net.
INTRODUCCION A LOS SISTEMAS DE CONTROL JCML
Vous aimerez peut-être aussi
- Tabla de Fracciones Pulgada, Decimales de Pulgada, MilímetrosDocument1 pageTabla de Fracciones Pulgada, Decimales de Pulgada, MilímetrosAngelloPas encore d'évaluation
- Despiece MP1000Document200 pagesDespiece MP1000Angello100% (3)
- Sikagard - 720 EpocemDocument5 pagesSikagard - 720 EpocemAngelloPas encore d'évaluation
- Lab. N°4 Diagrama de Bode (Magnitud y Fase)Document25 pagesLab. N°4 Diagrama de Bode (Magnitud y Fase)AngelloPas encore d'évaluation
- EnerpacDocument232 pagesEnerpacMarco Abarca100% (1)
- Manual PowerStar W7 - ESDocument7 pagesManual PowerStar W7 - ESAngello67% (6)
- Teja Proteja PVC Perfil 100Document6 pagesTeja Proteja PVC Perfil 100Yerson OrtizPas encore d'évaluation
- Tanques HidrostaticosDocument7 pagesTanques HidrostaticosKevinEloyPTPas encore d'évaluation
- Resumen Cortante BasalDocument7 pagesResumen Cortante Basaltopu2345Pas encore d'évaluation
- Coeficiente de Convección o PelicularDocument5 pagesCoeficiente de Convección o PelicularAdoBrodPas encore d'évaluation
- UTP Guia de Laboratorio 1 HITDDocument5 pagesUTP Guia de Laboratorio 1 HITDRenzo CcopaPas encore d'évaluation
- Perforadora Cop 1838 C VersionDocument28 pagesPerforadora Cop 1838 C Versionsandropema100% (1)
- Manual Quimica Analitica CuantitativaDocument104 pagesManual Quimica Analitica CuantitativaYahaira JarquínPas encore d'évaluation
- Problema Cadena BMW Motor N47, Qué Hacer y Soluciones RecomotorDocument1 pageProblema Cadena BMW Motor N47, Qué Hacer y Soluciones RecomotorJuan Antonio Jiménez PazosPas encore d'évaluation
- Tema 1 - Del 1.1 Al 1.2 (27 Puntos)Document7 pagesTema 1 - Del 1.1 Al 1.2 (27 Puntos)Janser Nicolas Estevez MorroberPas encore d'évaluation
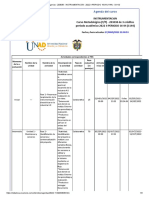
- Agenda - 203038 - Instrumentación - 2022 II Periodo 16-04 (1144) - Sii 4.0Document3 pagesAgenda - 203038 - Instrumentación - 2022 II Periodo 16-04 (1144) - Sii 4.0Jose Nestor cataño padillaPas encore d'évaluation
- Glosario de Terminos Relacionados Con La Pintura y Los RecubrimientosDocument41 pagesGlosario de Terminos Relacionados Con La Pintura y Los RecubrimientosJorge Sanchez100% (1)
- Silabos EstadisticaDocument7 pagesSilabos EstadisticafelixPas encore d'évaluation
- Laboratorio2 OPeradoresDocument46 pagesLaboratorio2 OPeradoresAmeth ArmasPas encore d'évaluation
- Materiales-Puzolanicos-Alternativos (Tarea 2)Document4 pagesMateriales-Puzolanicos-Alternativos (Tarea 2)Alex HernandezPas encore d'évaluation
- Circuitos DigitalesDocument40 pagesCircuitos Digitalesapi-3771560100% (1)
- Mascara MSA - ESDocument32 pagesMascara MSA - ESmarePas encore d'évaluation
- CalorLatente Javier Bravo AhujaDocument12 pagesCalorLatente Javier Bravo AhujaPROFABELGPPas encore d'évaluation
- Mapa Mental EEDocument1 pageMapa Mental EEVictor Hugo SillericoPas encore d'évaluation
- Complejo Arqueologico de KotoshDocument10 pagesComplejo Arqueologico de KotoshRaphael Campos100% (1)
- Informe Tecnico Caseta Monitoreo Ambiental Unam 2021Document19 pagesInforme Tecnico Caseta Monitoreo Ambiental Unam 2021comte6668991Pas encore d'évaluation
- LISTA DE PRECIOS LEDS 14 Febrero Al 15 Marzo PDFDocument12 pagesLISTA DE PRECIOS LEDS 14 Febrero Al 15 Marzo PDFAndres Fernando Gomez RodriguezPas encore d'évaluation
- Causas de Desbalanceo en Máquinas RotativasDocument8 pagesCausas de Desbalanceo en Máquinas RotativasGessica CañasPas encore d'évaluation
- Fabricacion de Un MotorDocument5 pagesFabricacion de Un MotorSergio PedrozoPas encore d'évaluation
- Talleres Cisco Unidad 3Document9 pagesTalleres Cisco Unidad 3Mauricio SalazarPas encore d'évaluation
- Informe de Laboratorio 2Document4 pagesInforme de Laboratorio 2David FarinangoPas encore d'évaluation
- Correlaciones PVTDocument30 pagesCorrelaciones PVTMario TrejoPas encore d'évaluation
- Analisis de Las Formas de Arranque Del Motor TrifásicoDocument13 pagesAnalisis de Las Formas de Arranque Del Motor TrifásicoAntonio EspinozaPas encore d'évaluation
- Funciones DaxDocument2 pagesFunciones Daxoscar_ordonez200% (1)
- Reporte de PrácticaDocument21 pagesReporte de PrácticaVitore MorleonePas encore d'évaluation
- Formulario - Solicitud - Elaboracion - de Planos PDFDocument1 pageFormulario - Solicitud - Elaboracion - de Planos PDFRafael SánchezPas encore d'évaluation