Vous aimerez peut-être aussi
- Material Damage and Failure in AbaqusDocument19 pagesMaterial Damage and Failure in AbaqusVenu KishorePas encore d'évaluation
- ABAQUS Element Selection CriteriaDocument45 pagesABAQUS Element Selection Criteriacoteesh100% (1)
- l3 MaterialsDocument32 pagesl3 MaterialsZaouiPas encore d'évaluation
- Adaptive MeshDocument38 pagesAdaptive Meshbooks_ukPas encore d'évaluation
- Failure Theories..Document93 pagesFailure Theories..adnanmominPas encore d'évaluation
- Characterisation of Damage in Hyperelastic Materials Using AbaqusDocument15 pagesCharacterisation of Damage in Hyperelastic Materials Using AbaqusVenu KishorePas encore d'évaluation
- CodesDocument2 pagesCodeshardikgoyani111100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Cecilia-Puff-Tee-Final-OUSM-Designs-12 MESES A TALLA 8Document19 pagesCecilia-Puff-Tee-Final-OUSM-Designs-12 MESES A TALLA 8Jose SanchezPas encore d'évaluation
- RACI Matrix Design For Managing Stakeholders in PRDocument12 pagesRACI Matrix Design For Managing Stakeholders in PRRheza Nugraha Prabareswara100% (1)
- GP1 Q1 Week-1Document18 pagesGP1 Q1 Week-1kickyknacksPas encore d'évaluation
- Combined Shear and TensionDocument16 pagesCombined Shear and TensionDAN MARK OPONDAPas encore d'évaluation
- Sony Cdm82a 82b Cmt-hpx11d Hcd-hpx11d Mechanical OperationDocument12 pagesSony Cdm82a 82b Cmt-hpx11d Hcd-hpx11d Mechanical OperationDanPas encore d'évaluation
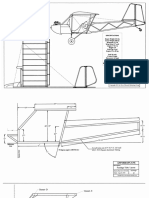
- Plans PDFDocument49 pagesPlans PDFEstevam Gomes de Azevedo85% (34)
- Amnaya Sutra (English)Document458 pagesAmnaya Sutra (English)Assam Bhakti SagarPas encore d'évaluation
- Recipes From The Perfect Scoop by David LebovitzDocument10 pagesRecipes From The Perfect Scoop by David LebovitzThe Recipe Club100% (7)
- Middle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryDocument22 pagesMiddle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryMerlinPas encore d'évaluation
- 3-History Rock Cut MonumentDocument136 pages3-History Rock Cut MonumentkrishnaPas encore d'évaluation
- JC Series Jaw Crusher PDFDocument8 pagesJC Series Jaw Crusher PDFgarrybieber100% (1)
- Mean Variance Portfolio TheoryDocument85 pagesMean Variance Portfolio TheoryEbenezerPas encore d'évaluation
- Nivel VV-VW Board User Guide enDocument5 pagesNivel VV-VW Board User Guide enHarveyWishtartPas encore d'évaluation
- Nissan Copper LTDDocument11 pagesNissan Copper LTDankit_shahPas encore d'évaluation
- Table Equivalent Schedule 40 Steel PipeDocument1 pageTable Equivalent Schedule 40 Steel PipeorisPas encore d'évaluation
- Presentation On 4G TechnologyDocument23 pagesPresentation On 4G TechnologyFresh EpicPas encore d'évaluation
- Nasopharyngeal Angiofibroma - PPTX Essam SrourDocument10 pagesNasopharyngeal Angiofibroma - PPTX Essam SrourSimina ÎntunericPas encore d'évaluation
- LG250CDocument2 pagesLG250CCarlosPas encore d'évaluation
- NCP Orif Right Femur Post OpDocument2 pagesNCP Orif Right Femur Post OpCen Janber CabrillosPas encore d'évaluation
- Board Replacement CasesDocument41 pagesBoard Replacement CasesNadeeshPas encore d'évaluation
- Rail Vehicle DynamicsDocument55 pagesRail Vehicle DynamicsdfPas encore d'évaluation
- Stalthon Rib and InfillDocument2 pagesStalthon Rib and InfillAndrea GibsonPas encore d'évaluation
- Napoleonic WargamingDocument13 pagesNapoleonic WargamingandyPas encore d'évaluation
- Tesla Coil ProjectDocument8 pagesTesla Coil ProjectShivam singhPas encore d'évaluation
- Halfen Cast-In Channels: HTA-CE 50/30P HTA-CE 40/22PDocument92 pagesHalfen Cast-In Channels: HTA-CE 50/30P HTA-CE 40/22PTulusPas encore d'évaluation
- Toshiba: ® A20SeriesDocument12 pagesToshiba: ® A20SeriesYangPas encore d'évaluation
- MTH100Document3 pagesMTH100Syed Abdul Mussaver ShahPas encore d'évaluation
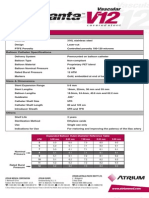
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiPas encore d'évaluation
- De Vault 1996Document22 pagesDe Vault 1996Harumi OOPas encore d'évaluation
- Why Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmDocument6 pagesWhy Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmIsaac FernándezPas encore d'évaluation