Vous aimerez peut-être aussi
- Bien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLD'EverandBien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLPas encore d'évaluation
- Chapitre 1 - Introduction Aux Réseaux - NSDocument38 pagesChapitre 1 - Introduction Aux Réseaux - NSAyoub MabroukPas encore d'évaluation
- Schemindus 1Document101 pagesSchemindus 1iliasbahloul100% (4)
- Moteurs SiemensDocument181 pagesMoteurs Siemensعبد الكريم ملوحPas encore d'évaluation
- Automates Et Réseaux Locaux IndustrielsDocument88 pagesAutomates Et Réseaux Locaux IndustrielsAnas HEDDOUNPas encore d'évaluation
- 1 - Cours Réseaux PDFDocument11 pages1 - Cours Réseaux PDFMiguel Clovis KamPas encore d'évaluation
- Résumé Cours Réseaux Et Bus IndustrielsDocument15 pagesRésumé Cours Réseaux Et Bus IndustrielsRayan AtmaniPas encore d'évaluation
- Ccna1 Corrige TD 02Document8 pagesCcna1 Corrige TD 02Jocelyn Sim100% (1)
- TSEI 2 Reseau LocauxDocument37 pagesTSEI 2 Reseau Locauxmomo chardinPas encore d'évaluation
- Control 1 CCNA3 (1) WordDocument2 pagesControl 1 CCNA3 (1) WordsoumaPas encore d'évaluation
- Hapitre Nitiation Aux Réseaux CommutésDocument96 pagesHapitre Nitiation Aux Réseaux CommutésgtariiinesPas encore d'évaluation
- Chapitre IhDocument14 pagesChapitre IhSel MaPas encore d'évaluation
- Cours Res Prot Partie1éDocument112 pagesCours Res Prot Partie1éMourad BelkassemiPas encore d'évaluation
- Généralités Sur Les Réseaux Locaux IndustrielsDocument44 pagesGénéralités Sur Les Réseaux Locaux IndustrielsOmar Erraji100% (3)
- Les Avantages Et Les Contraintes Des Différents Types de RéseauxDocument33 pagesLes Avantages Et Les Contraintes Des Différents Types de RéseauxScribdTranslationsPas encore d'évaluation
- Rapportdestageswitching Nat-1Document42 pagesRapportdestageswitching Nat-1Mahmoud CherifPas encore d'évaluation
- RésuméChapitre 3 Protocoles Et Communication ResesauxDocument9 pagesRésuméChapitre 3 Protocoles Et Communication ResesauxBuzz SN221Pas encore d'évaluation
- Examen Final Version 5Document23 pagesExamen Final Version 5smail lahmidiPas encore d'évaluation
- Chapiter 3Document7 pagesChapiter 3Areh yare abwan somaliyedPas encore d'évaluation
- Couche OsiDocument21 pagesCouche Osiahmedjebali0011Pas encore d'évaluation
- Architecture RéseauDocument17 pagesArchitecture RéseauSmart Boun'sPas encore d'évaluation
- Le Modéle OSIDocument5 pagesLe Modéle OSIdesignsyoussef89Pas encore d'évaluation
- Cours Fondements Réseaux 2Document136 pagesCours Fondements Réseaux 2Malek LouihguiPas encore d'évaluation
- Chapitre1 Introduction Protocoles RéseauxDocument34 pagesChapitre1 Introduction Protocoles RéseauxSahar NefziPas encore d'évaluation
- Chapitre 2 OSI TCPIPDocument13 pagesChapitre 2 OSI TCPIPOmar DrissiPas encore d'évaluation
- CH1-partie1-Conception D'un RéseauDocument62 pagesCH1-partie1-Conception D'un RéseauMorad KechPas encore d'évaluation
- 1 - Réseaux Industriels-IntoductionDocument27 pages1 - Réseaux Industriels-Intoductionabdelali saadPas encore d'évaluation
- Services Réseaux Ch1Document19 pagesServices Réseaux Ch1Asma HammamiPas encore d'évaluation
- Chapitre 1 - Introduction Aux RéseauxDocument37 pagesChapitre 1 - Introduction Aux RéseauxasmaPas encore d'évaluation
- 1.intro OSIDocument7 pages1.intro OSIColmain NassiriPas encore d'évaluation
- Projet Réseau de Kherfallah - Ipm - 2010 - 2011Document17 pagesProjet Réseau de Kherfallah - Ipm - 2010 - 2011Boubaker KherfallahPas encore d'évaluation
- Cours Introduction Aux Réseaux: Niveau: RIOT2Document75 pagesCours Introduction Aux Réseaux: Niveau: RIOT2mehdiPas encore d'évaluation
- Chapitre4couche RéseauxDocument10 pagesChapitre4couche RéseauxEmyy JookPas encore d'évaluation
- Cours Reseau STI 2D ProfesseurDocument12 pagesCours Reseau STI 2D ProfesseurMAHAMANE KANOPas encore d'évaluation
- Dokumen - Tips - Generalites Sur Les Reseaux 1 Les Reseaux InformatiquesDocument54 pagesDokumen - Tips - Generalites Sur Les Reseaux 1 Les Reseaux InformatiquesJacques ZINSePas encore d'évaluation
- Chapitre 1 - Cisco 3Document15 pagesChapitre 1 - Cisco 3louismichel2Pas encore d'évaluation
- Chapitre 1 Osi TcpipDocument31 pagesChapitre 1 Osi TcpipFrancky Manfus LeGoogle100% (1)
- Khouloud Hwes Sujet01 Orchestration SD WANDocument60 pagesKhouloud Hwes Sujet01 Orchestration SD WANkholoud hwasPas encore d'évaluation
- Partie 1 Les Réseaux Locaux IndustrielsDocument3 pagesPartie 1 Les Réseaux Locaux IndustrielsimenenouvellePas encore d'évaluation
- Partie 1 Les Réseaux Locaux IndustrielsDocument3 pagesPartie 1 Les Réseaux Locaux IndustrielsimenenouvellePas encore d'évaluation
- Chap 1Document59 pagesChap 1nizar bendjaballahPas encore d'évaluation
- RX 70Document30 pagesRX 70Bonaventure KounouhoPas encore d'évaluation
- Chapitre 1-2 - Communiquer Sur Le RéseauDocument32 pagesChapitre 1-2 - Communiquer Sur Le RéseauAbdou CissePas encore d'évaluation
- Chapitre 2 - Réseaux Locaux InformatiquesDocument54 pagesChapitre 2 - Réseaux Locaux InformatiquesMohamed DjezzarPas encore d'évaluation
- ResouDocument11 pagesResouRachid BenharkatPas encore d'évaluation
- Guide SwitchingDocument22 pagesGuide SwitchingALI JedidiPas encore d'évaluation
- Les Reseaux IndustrielsDocument4 pagesLes Reseaux Industrielsmobio jeanPas encore d'évaluation
- Chapitre VI: Le Modèle de Référence OSIDocument20 pagesChapitre VI: Le Modèle de Référence OSIessiben nganguePas encore d'évaluation
- Cours_N02_le_modele_OSI_partie1Document31 pagesCours_N02_le_modele_OSI_partie1moumeneaouali18Pas encore d'évaluation
- Chapitre 2 Le Modèle en Couches OSI Le Modèle en Couches OSIDocument33 pagesChapitre 2 Le Modèle en Couches OSI Le Modèle en Couches OSIMohamed TraorePas encore d'évaluation
- PROFIBUSDocument5 pagesPROFIBUSbassel boudoukhaPas encore d'évaluation
- CH2-partie1-Conception D'un RéseauDocument41 pagesCH2-partie1-Conception D'un RéseauMorad KechPas encore d'évaluation
- Chapitre II Normes & ProtocolesDocument28 pagesChapitre II Normes & ProtocolesAchrafPas encore d'évaluation
- TD Réseau 2 SUITE CORRIGEDocument10 pagesTD Réseau 2 SUITE CORRIGEIsmaila CoulibalyPas encore d'évaluation
- INGE5-2023-Communication Industrielle-Chapitre 1Document24 pagesINGE5-2023-Communication Industrielle-Chapitre 1Paul NkomboPas encore d'évaluation
- ExamDocument91 pagesExamMohammed BelmouddnePas encore d'évaluation
- RX Info chp3 1ADocument6 pagesRX Info chp3 1ALouis KouassiPas encore d'évaluation
- Cours Techniques D'administration RéseauxDocument29 pagesCours Techniques D'administration RéseauxArmosPas encore d'évaluation
- Chap.2 PROCEDURES ET PROTOCOLESDocument11 pagesChap.2 PROCEDURES ET PROTOCOLESDaniel ATCHADEPas encore d'évaluation
- Cours RéseauxDocument246 pagesCours RéseauxbelfathiPas encore d'évaluation
- RéseauDocument6 pagesRéseauBenhar ImadPas encore d'évaluation
- Reseau Damm PDFDocument206 pagesReseau Damm PDFBLEL ILHEMPas encore d'évaluation
- Maîtriser PowerShell: Guide Complet: La collection informatiqueD'EverandMaîtriser PowerShell: Guide Complet: La collection informatiquePas encore d'évaluation
- Chapitre A3Document7 pagesChapitre A3عبد الكريم ملوحPas encore d'évaluation
- QCM Chapitre 11: MR MalfoyDocument18 pagesQCM Chapitre 11: MR Malfoyعبد الكريم ملوحPas encore d'évaluation
- Electrotechnique CM: 10h TD: 20h TP: 30hDocument69 pagesElectrotechnique CM: 10h TD: 20h TP: 30hعبد الكريم ملوحPas encore d'évaluation
- Parcours OPC UA Smart IndustriesDocument16 pagesParcours OPC UA Smart Industriesعبد الكريم ملوحPas encore d'évaluation
- Structure D'Une Installation ElectriqueDocument7 pagesStructure D'Une Installation Electriqueعبد الكريم ملوحPas encore d'évaluation
- Talentum User Manual FrenchDocument6 pagesTalentum User Manual Frenchعبد الكريم ملوحPas encore d'évaluation
- LagabSofiane MezianiKDocument100 pagesLagabSofiane MezianiKعبد الكريم ملوحPas encore d'évaluation
- 11477262Document5 pages11477262عبد الكريم ملوحPas encore d'évaluation
- GIL Detecteur Flamme V1Document13 pagesGIL Detecteur Flamme V1BarbaraPas encore d'évaluation
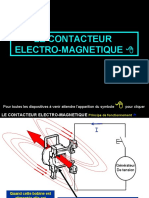
- Le Contacteur Electro-Magnetique: Pour Toutes Les Diapositives À Venir Attendre L'apparition Du Symbole Pour CliquerDocument15 pagesLe Contacteur Electro-Magnetique: Pour Toutes Les Diapositives À Venir Attendre L'apparition Du Symbole Pour Cliquerعبد الكريم ملوحPas encore d'évaluation
- DSH Detecteur de FlammeDocument3 pagesDSH Detecteur de FlammeHedi Ben MohamedPas encore d'évaluation
- FD8040 Brochure FRDocument2 pagesFD8040 Brochure FRعبد الكريم ملوحPas encore d'évaluation
- كتاب السنة أولى هندسة الطرائقDocument31 pagesكتاب السنة أولى هندسة الطرائقعبد الكريم ملوحPas encore d'évaluation
- Rectifieurs 6150320Document28 pagesRectifieurs 6150320عبد الكريم ملوحPas encore d'évaluation
- Anuel: Systèmes D'entraînement Décentralisés Interfaces Et Modules Répartiteur de Bus ProfibusDocument152 pagesAnuel: Systèmes D'entraînement Décentralisés Interfaces Et Modules Répartiteur de Bus Profibusعبد الكريم ملوحPas encore d'évaluation
- 2456 KSI Technical Manual FRADocument19 pages2456 KSI Technical Manual FRAHåmēd Bën MåkhtārįPas encore d'évaluation
- Formation SEWDocument28 pagesFormation SEWعبد الكريم ملوحPas encore d'évaluation
- SEW-USOCOME TUTO Module Parametres LT BP-CDocument1 pageSEW-USOCOME TUTO Module Parametres LT BP-Cعبد الكريم ملوحPas encore d'évaluation
- 069RB - Centrale HydrauliqueDocument23 pages069RB - Centrale Hydrauliqueعبد الكريم ملوحPas encore d'évaluation
- Machines FrigorifiqueDocument5 pagesMachines Frigorifiqueعبد الكريم ملوحPas encore d'évaluation
- Chapitre IDocument19 pagesChapitre IBA HIPas encore d'évaluation
- PLCSEWDocument92 pagesPLCSEWعبد الكريم ملوحPas encore d'évaluation
- Numi 2Document14 pagesNumi 2Benz ZizoPas encore d'évaluation
- Chapitre 6Document14 pagesChapitre 6Mina KhanPas encore d'évaluation
- Pile CombustibleDocument10 pagesPile Combustibleعبد الكريم ملوحPas encore d'évaluation
- AD Machine ThermiqueDocument28 pagesAD Machine ThermiqueKhaled ChaibPas encore d'évaluation
- AH810F13Document14 pagesAH810F13عبد الكريم ملوحPas encore d'évaluation
- 04 Description Fonctionnement PacDocument7 pages04 Description Fonctionnement Pachana tliliPas encore d'évaluation
- Resume Theorique m103 v2 1201 620cd6559047bDocument374 pagesResume Theorique m103 v2 1201 620cd6559047bHoussam KhounaPas encore d'évaluation
- TP RoutageDocument10 pagesTP RoutageAhmed FayçalPas encore d'évaluation
- Cours ScapyDocument88 pagesCours Scapyvlsenghor97Pas encore d'évaluation
- Adresse Ip - Mon IP - Quel Est MonipDocument1 pageAdresse Ip - Mon IP - Quel Est Moniprqg7b22c67Pas encore d'évaluation
- Control 1 - IngSuppDocument3 pagesControl 1 - IngSuppFerdaous HdioudPas encore d'évaluation
- TP 02 2023Document2 pagesTP 02 2023KHELIF ADEM ABDELBASSETPas encore d'évaluation
- 1 DHCPDocument1 page1 DHCPHamzaIraquiHoussainiPas encore d'évaluation
- Sujet 3Document2 pagesSujet 3Karim Berkaine100% (1)
- Chapitre 1Document9 pagesChapitre 1Hmaoui HoudaPas encore d'évaluation
- 4.3.3.4 Lab 1 Configure HSRPDocument8 pages4.3.3.4 Lab 1 Configure HSRPDamak SanaPas encore d'évaluation
- Annuaire Statistique-Telecom Tic FrancaisDocument113 pagesAnnuaire Statistique-Telecom Tic FrancaisVanex DjachéPas encore d'évaluation
- 02 TCP IpDocument33 pages02 TCP Ipglo choPas encore d'évaluation
- Service ToIP Avec Asterisk Pour L'université de BéjaiaDocument99 pagesService ToIP Avec Asterisk Pour L'université de BéjaiaLandry AnongPas encore d'évaluation
- FTTN Architectures and PerformanceDocument6 pagesFTTN Architectures and Performancejean5no5l5kanga0% (1)
- Examen de Fin de Formation 2017 ThéoriqueDocument10 pagesExamen de Fin de Formation 2017 ThéoriqueMustapha AberkaouiPas encore d'évaluation
- Support de Cours Ccna1 Partie1Document12 pagesSupport de Cours Ccna1 Partie1Eddy TankouPas encore d'évaluation
- Simulation D'une Liaison WAN Entre Deux Routeurs: TP3 Réseau HDDocument4 pagesSimulation D'une Liaison WAN Entre Deux Routeurs: TP3 Réseau HDMe RePas encore d'évaluation
- M198a01 40Document2 pagesM198a01 40Pablo TeránPas encore d'évaluation
- Cours CCNADocument69 pagesCours CCNANael Le Bayon100% (1)
- TP - 04 Réseau WifiDocument2 pagesTP - 04 Réseau Wifikaka mimoPas encore d'évaluation
- Cours Securité Isiseiot s2Document5 pagesCours Securité Isiseiot s2Hedir Ben MoussaPas encore d'évaluation
- Norme Et Protocole - Chapitre4Document8 pagesNorme Et Protocole - Chapitre4Lilia MahdjoubPas encore d'évaluation
- Chapitre9-Segmentation en Sous-RéseauxDocument25 pagesChapitre9-Segmentation en Sous-RéseauxSoukaina HaddiPas encore d'évaluation
- TD3 Correction PDFDocument6 pagesTD3 Correction PDFLinda ZaafraniPas encore d'évaluation
- 3.réseaux WANDocument7 pages3.réseaux WANSofia BouchenakPas encore d'évaluation
- Intro Bis PDFDocument25 pagesIntro Bis PDFATTAH Régis Patrick AusséPas encore d'évaluation
- ITN Module 4Document39 pagesITN Module 4Al Djila SENEPas encore d'évaluation
- 0723 Les Reseaux Principes FondamentauxDocument13 pages0723 Les Reseaux Principes FondamentauxAbdelmadjid BouamamaPas encore d'évaluation
- 03 - Gérer La Couche Underlay de SDADocument4 pages03 - Gérer La Couche Underlay de SDAMangaka RenaissancePas encore d'évaluation