Vous aimerez peut-être aussi
- Méthode Num SuiteDocument85 pagesMéthode Num Suiteoteme Mbella King Duclair100% (1)
- Théorie de Mécanisme 2Document10 pagesThéorie de Mécanisme 2hamza100% (1)
- Exercices Mecanique GeneraleDocument295 pagesExercices Mecanique GeneraleSalah-eddine ZitiPas encore d'évaluation
- Mecanismes Plans A Quatre Barres Articulees 4Document30 pagesMecanismes Plans A Quatre Barres Articulees 4zouhour brahmiPas encore d'évaluation
- DTL1 05 - 06Document2 pagesDTL1 05 - 06Sellé GueyePas encore d'évaluation
- Agrégation Des Sciences Mathématiques (Session de 1927) - Mathematiques SpécialesDocument17 pagesAgrégation Des Sciences Mathématiques (Session de 1927) - Mathematiques SpécialesAlex DumortierPas encore d'évaluation
- 3 0 Systèmes Mécaniques Articulés Et RobotiqueDocument100 pages3 0 Systèmes Mécaniques Articulés Et RobotiqueredaPas encore d'évaluation
- Chap02 - Modèle Géométrique Direct PDFDocument19 pagesChap02 - Modèle Géométrique Direct PDFBadr Kaakoua100% (2)
- 111 1 9 Cinematique GraphiqueDocument10 pages111 1 9 Cinematique GraphiqueCherki ONkPas encore d'évaluation
- Exercices Mécanique GénéraleDocument295 pagesExercices Mécanique GénéraleAmira Zarglayoun100% (6)
- Exercices Nombres ComplexesDocument17 pagesExercices Nombres ComplexesA.Benhari100% (1)
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Document19 pagesRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CasePas encore d'évaluation
- Mécanique Du Solide 1 PDFDocument60 pagesMécanique Du Solide 1 PDFIrma NazaPas encore d'évaluation
- Mouvement MetronomeDocument13 pagesMouvement MetronomeIrfan AzizPas encore d'évaluation
- TD Merd Ges4 2023-2024Document2 pagesTD Merd Ges4 2023-2024Lachance Awounang12Pas encore d'évaluation
- Phy 121 Examen Mai 2010 CorrigeDocument8 pagesPhy 121 Examen Mai 2010 Corrigetotoche1234Pas encore d'évaluation
- DSN 108Document3 pagesDSN 108aydi abdelhediPas encore d'évaluation
- Ch02 Methode PiDocument26 pagesCh02 Methode PiMohamed HouhouPas encore d'évaluation
- Klubprepa Extrait 6962Document7 pagesKlubprepa Extrait 6962bhsbhs190% (1)
- Dynamique Des Structures II-Cours N 4 - 2Document18 pagesDynamique Des Structures II-Cours N 4 - 2Abderrahim Boulanouar100% (1)
- Théorie de Mécanisme 7Document16 pagesThéorie de Mécanisme 7hamzaPas encore d'évaluation
- 1 Sujet VirageDocument4 pages1 Sujet VirageNadia DridiPas encore d'évaluation
- Calcul Pratique Des FlèchesDocument8 pagesCalcul Pratique Des FlèchesAhmed SamirPas encore d'évaluation
- IntegraleDocument28 pagesIntegraleSphynx SphynxPas encore d'évaluation
- 10 TrigonométrieDocument21 pages10 Trigonométrienicobar14Pas encore d'évaluation
- Devoir de Mecanique Du Point Parcours Srit 14-15Document6 pagesDevoir de Mecanique Du Point Parcours Srit 14-15PLK 225Pas encore d'évaluation
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaPas encore d'évaluation
- Série D'exercices - Sciences Physiques - Oscillations Mécaniques Libres - Bac Sciences Exp (2018-2019) MR Guesmi JamelDocument6 pagesSérie D'exercices - Sciences Physiques - Oscillations Mécaniques Libres - Bac Sciences Exp (2018-2019) MR Guesmi Jamelmaram lassouedPas encore d'évaluation
- TD - mecanique-MPCI 1 - 23-24 - DR NEBIEDocument4 pagesTD - mecanique-MPCI 1 - 23-24 - DR NEBIESinaly ZerboPas encore d'évaluation
- Sujet Et Corrigé Type Cocours D'entrée À l'INSPEI 2017 MathématiquesDocument13 pagesSujet Et Corrigé Type Cocours D'entrée À l'INSPEI 2017 MathématiquesDavid BAWAPas encore d'évaluation
- Théorie de Mécanisme 4Document6 pagesThéorie de Mécanisme 4hamza100% (1)
- MecaniqueDocument18 pagesMecaniqueStephane Durel MbidaPas encore d'évaluation
- Chapitre II TM 2020Document7 pagesChapitre II TM 2020Ammar Athmania100% (1)
- BH 3Document6 pagesBH 3pilaf62Pas encore d'évaluation
- Elast SYNT 2003 PDFDocument2 pagesElast SYNT 2003 PDFHamza BarkallahPas encore d'évaluation
- TD CinematiqueDocument3 pagesTD CinematiqueLantrier KacouPas encore d'évaluation
- Serie 1 - BCG - S1Document2 pagesSerie 1 - BCG - S1esmorad53Pas encore d'évaluation
- Les SynchromachinesDocument11 pagesLes Synchromachinesredouane lotfiPas encore d'évaluation
- Système LineaireDocument13 pagesSystème LineaireIlyassBahaaPas encore d'évaluation
- Corrigé - Porte Auto de TGVDocument4 pagesCorrigé - Porte Auto de TGVlouis.hen62790Pas encore d'évaluation
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- Labo-2_E2020Document8 pagesLabo-2_E2020aminevirtualPas encore d'évaluation
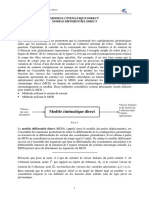
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamPas encore d'évaluation
- Série N° 2 MSI - Cinématique I: Exercice 2Document3 pagesSérie N° 2 MSI - Cinématique I: Exercice 2mezziPas encore d'évaluation
- TDN1 2 3 23Document13 pagesTDN1 2 3 23lahloulamia2020Pas encore d'évaluation
- 4-Chapitre 4Document29 pages4-Chapitre 4star1coachPas encore d'évaluation
- TD Cinematique 9Document5 pagesTD Cinematique 9Jed MansouriPas encore d'évaluation
- Exercices CorrigésDocument14 pagesExercices CorrigésbonbeurPas encore d'évaluation
- Papiers Millimetres 2Document4 pagesPapiers Millimetres 2KarimBenA100% (1)
- Mecanisme ElevateurDocument8 pagesMecanisme ElevateurSimoMonkadPas encore d'évaluation
- Coordonnées Polaires - WikipédiaDocument43 pagesCoordonnées Polaires - WikipédiaKem VicPas encore d'évaluation
- Porte de TGV CorrigeDocument2 pagesPorte de TGV Corrigecezede101214Pas encore d'évaluation
- Chapitre 4Document35 pagesChapitre 4CHiZORI 19Pas encore d'évaluation
- Chapitre 2modãlisation de MAS Et MSDocument14 pagesChapitre 2modãlisation de MAS Et MSMaram MërïemPas encore d'évaluation
- Devoir Maison 7CDocument2 pagesDevoir Maison 7CAhmed HamidPas encore d'évaluation
- Exercices: Rotation D'un Solide Autour D'un Axe Fixe Porf:BouasriaDocument2 pagesExercices: Rotation D'un Solide Autour D'un Axe Fixe Porf:Bouasriaqualitywood.akPas encore d'évaluation
- Correction CircuitDocument5 pagesCorrection CircuitAbdelhak FadiliPas encore d'évaluation
- Mécanique TD1Document2 pagesMécanique TD1MajdolinePas encore d'évaluation
- TD Méthod NumDocument40 pagesTD Méthod NumAiglecity OukassouPas encore d'évaluation
- 2010MULH3206 These YousefDocument147 pages2010MULH3206 These YousefkaderPas encore d'évaluation
- ch11 Generalites Sur Les Capteurs PDFDocument8 pagesch11 Generalites Sur Les Capteurs PDFbouchra100% (1)
- Controle Non Destructif (CND)Document69 pagesControle Non Destructif (CND)rcaone67% (3)
- Dzexams 2am Francais d2 20211 548740Document4 pagesDzexams 2am Francais d2 20211 548740kaderPas encore d'évaluation
- Dzexams 2am Francais d2 20211 548740Document4 pagesDzexams 2am Francais d2 20211 548740kaderPas encore d'évaluation
- Generalites de L'injection EssenceDocument53 pagesGeneralites de L'injection Essencenearl100% (1)
- HAMDAN 2013 ArchivageDocument152 pagesHAMDAN 2013 ArchivagebassbngPas encore d'évaluation
- Dzexams 2am Francais d2 20201 1978504Document5 pagesDzexams 2am Francais d2 20201 1978504kaderPas encore d'évaluation
- Développement Des Techniques de Contrôle Non Destructif Et Élaboration Des Procédures D'inspection Et D'entretienDocument111 pagesDéveloppement Des Techniques de Contrôle Non Destructif Et Élaboration Des Procédures D'inspection Et D'entretienkaderPas encore d'évaluation
- 2017-01 Gel-1001 CNDDocument66 pages2017-01 Gel-1001 CNDfouadPas encore d'évaluation
- AnnexDocument5 pagesAnnexkaderPas encore d'évaluation
- Dzexams 2am Francais d2 20211 333798Document4 pagesDzexams 2am Francais d2 20211 333798kaderPas encore d'évaluation
- Coursequence 4Document5 pagesCoursequence 4kaderPas encore d'évaluation
- Fiche TD1Document2 pagesFiche TD1kaderPas encore d'évaluation
- Dzexams 2am Francais d2 20201 1978504Document5 pagesDzexams 2am Francais d2 20201 1978504kaderPas encore d'évaluation
- Algebre 1Document65 pagesAlgebre 1rieaman_taylorPas encore d'évaluation
- Dzexams 2am Francais d2 20211 333798Document4 pagesDzexams 2am Francais d2 20211 333798kaderPas encore d'évaluation
- FsinusDocument2 pagesFsinusDaaray Cheikhoul XadimPas encore d'évaluation
- Analyse 2 - 3eme PartieDocument9 pagesAnalyse 2 - 3eme PartiekaderPas encore d'évaluation
- Espace Vectoriel BaseDocument5 pagesEspace Vectoriel Basecedric2014Pas encore d'évaluation
- Espace Vectoriel BaseDocument5 pagesEspace Vectoriel Basecedric2014Pas encore d'évaluation
- Ex Ensembles Et ApplicationsDocument1 pageEx Ensembles Et ApplicationskaderPas encore d'évaluation
- Ex Ensembles Et ApplicationsDocument1 pageEx Ensembles Et ApplicationskaderPas encore d'évaluation
- L1 Analyse2 00Document114 pagesL1 Analyse2 00Ihsan MokhlissePas encore d'évaluation
- Elements de Logique EnsemblesDocument9 pagesElements de Logique EnsembleskaderPas encore d'évaluation
- Matrices PDFDocument17 pagesMatrices PDFGabo Jean HypolitePas encore d'évaluation
- Mias1 PDFDocument79 pagesMias1 PDFYann FloxyPas encore d'évaluation
- Calcul IntegralDocument208 pagesCalcul Integralwwwkader78% (9)
- Cours D'algèbre 1 PDFDocument60 pagesCours D'algèbre 1 PDFNabik100% (1)
- Cours MatriceDocument23 pagesCours MatriceRabie DariiPas encore d'évaluation
- Ballon Tampon Deau Chaude de Chauffage Caleo Gamme Acier 200 A 10 000lDocument3 pagesBallon Tampon Deau Chaude de Chauffage Caleo Gamme Acier 200 A 10 000lAmir AmiroPas encore d'évaluation
- Gestion de La Production IndustrielleDocument80 pagesGestion de La Production Industrielleabdelillah870% (1)
- Correction Du Devoir de Niveau de Spé Maths Tle Du 09 Décembre 2023Document5 pagesCorrection Du Devoir de Niveau de Spé Maths Tle Du 09 Décembre 2023orianedatte28Pas encore d'évaluation
- 338 PDFDocument9 pages338 PDFMohammed BdrPas encore d'évaluation
- TP 3Document3 pagesTP 3majdoub manelPas encore d'évaluation
- Cours EnR - Réseaux Electriques Chap 2Document12 pagesCours EnR - Réseaux Electriques Chap 2Ali BoukhrissPas encore d'évaluation
- Windev 10 Guide Autoformation PDFDocument474 pagesWindev 10 Guide Autoformation PDFSantiago Marcelino Leon LuisPas encore d'évaluation
- Comment Dimensionner Le Vase D'expansionDocument5 pagesComment Dimensionner Le Vase D'expansionAbdelwaheb RjebPas encore d'évaluation
- Examen MasterTI 13-14-1Document2 pagesExamen MasterTI 13-14-1Safaa KahilPas encore d'évaluation
- Matériaux de ConstructionDocument218 pagesMatériaux de ConstructionMajda AmzirPas encore d'évaluation
- Réseau Neronnes Et Logique FloueDocument11 pagesRéseau Neronnes Et Logique FloueKHAOULA WISSALE HARIKIPas encore d'évaluation
- TH8953Document121 pagesTH8953Ouss AmaPas encore d'évaluation
- DST Final Chimie CorrectionDocument3 pagesDST Final Chimie CorrectionYoman Arthur verdier AssuiPas encore d'évaluation
- Systeme de Signalisation - 24 02 16Document219 pagesSysteme de Signalisation - 24 02 16Larba Sawadogo100% (1)
- Combiac 2Document77 pagesCombiac 2bista chaymaPas encore d'évaluation
- Cours MCCDocument12 pagesCours MCChouss11100% (4)
- Mécanisation PneumatiqueDocument146 pagesMécanisation PneumatiqueFabien Chésini100% (1)
- Cours UMLDocument33 pagesCours UMLdeogratias davoPas encore d'évaluation
- TD 1Document2 pagesTD 1خديجة خير اللهPas encore d'évaluation
- Route 2Document5 pagesRoute 2bisPas encore d'évaluation
- Gaston Bachelard - L'Épistémologie Non-CartésienneDocument14 pagesGaston Bachelard - L'Épistémologie Non-CartésienneAlexyu RasqualPas encore d'évaluation
- Caracteristiques Geometrique D'une Section PlaneDocument8 pagesCaracteristiques Geometrique D'une Section PlaneFaten Rhimi Ben MedPas encore d'évaluation
- Devoir 2scDocument3 pagesDevoir 2scLotfi KhemiliPas encore d'évaluation
- Cours Ingénierie Des TélécommunicationsDocument70 pagesCours Ingénierie Des TélécommunicationsDaniel Ella100% (1)
- Protocole de Chiffrement RSADocument39 pagesProtocole de Chiffrement RSAdjhziadPas encore d'évaluation
- Simplexe-2 2Document3 pagesSimplexe-2 2Asma AsmitaPas encore d'évaluation
- Corrigé CF Aut SMC 2020Document6 pagesCorrigé CF Aut SMC 2020mohamed HanouniPas encore d'évaluation
- Formation PhotoshopDocument28 pagesFormation PhotoshopMounir Eloualhani100% (1)
- Suites Numeriques Exercices Non Corriges 3 6Document6 pagesSuites Numeriques Exercices Non Corriges 3 6copie masterPas encore d'évaluation
- Ict204 TP Examen 2023Document1 pageIct204 TP Examen 2023Donald TientcheuPas encore d'évaluation