Vous aimerez peut-être aussi
- Projets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadD'EverandProjets Arduino avec Tinkercad | Partie 2: Concevoir des projets électroniques avancés basés sur Arduino avec TinkercadPas encore d'évaluation
- 16FXXXDocument86 pages16FXXXkhmPas encore d'évaluation
- Exercice 6 - Alimentation D'une Cisaille - Cours TechniqueDocument1 pageExercice 6 - Alimentation D'une Cisaille - Cours Techniquejames morganPas encore d'évaluation
- TP N°1 M1 Embarqué MicrocontrôleurDocument2 pagesTP N°1 M1 Embarqué Microcontrôleurعمر الفاروقPas encore d'évaluation
- (DIY) Arduino Voiture Télécommandée Par Bluetooth + Code, Câblage PDFDocument1 page(DIY) Arduino Voiture Télécommandée Par Bluetooth + Code, Câblage PDFAidoudi Mohamed NidhalPas encore d'évaluation
- Rapport Des Trois Projets-1-ConvertiDocument16 pagesRapport Des Trois Projets-1-ConvertiAnonymous oNUTOePwPas encore d'évaluation
- Notes de Cours VLSIDocument198 pagesNotes de Cours VLSIMahmoud Doughan50% (2)
- Introduction Circuits Logiques Programmables - Presentation 2010Document38 pagesIntroduction Circuits Logiques Programmables - Presentation 2010fieea100% (2)
- Micro ControleurDocument9 pagesMicro ControleurAdel JamilaPas encore d'évaluation
- LabVIEW - TP A1 - 2007Document55 pagesLabVIEW - TP A1 - 2007thientuyettinhPas encore d'évaluation
- Conception Des Circuits Intégrés Prédiffusés Précaractérisés Et Sur Mesure v2010Document79 pagesConception Des Circuits Intégrés Prédiffusés Précaractérisés Et Sur Mesure v2010Kaled Habib100% (1)
- 06 PIC Les InterruptionsDocument12 pages06 PIC Les Interruptionsfatima khdidrPas encore d'évaluation
- Chapitre 10 Interruptions en MikrocDocument6 pagesChapitre 10 Interruptions en MikrocMedPas encore d'évaluation
- Micro-Controleur C51 Support Complet Et TPDocument78 pagesMicro-Controleur C51 Support Complet Et TPSeddik MaarfiPas encore d'évaluation
- Ele119 CompletDocument276 pagesEle119 CompletayoubPas encore d'évaluation
- Arduino Et Afficheur LCDDocument4 pagesArduino Et Afficheur LCDHichem Hamdi100% (1)
- Rapport PFEDocument88 pagesRapport PFEtarekgara100% (1)
- 2 Auto Automatique Et SystèmeDocument56 pages2 Auto Automatique Et SystèmeHmz OussamaPas encore d'évaluation
- Gestion Clavier Matriciel 16 TouchesDocument6 pagesGestion Clavier Matriciel 16 TouchesAntoine SaroufimePas encore d'évaluation
- TDDocument10 pagesTDredPas encore d'évaluation
- TD 2Document5 pagesTD 2adda chariPas encore d'évaluation
- Cours LST PIC 16F84 2019-2020Document116 pagesCours LST PIC 16F84 2019-2020Mouad Thf0% (1)
- Corrigé Type Examen Final Microprocesseurs Et API Master ELMDocument4 pagesCorrigé Type Examen Final Microprocesseurs Et API Master ELMMohammed ALMUSHIAAPas encore d'évaluation
- 2015 09 04 Cours ET 1A ImpDocument63 pages2015 09 04 Cours ET 1A ImpFarhat ThamerPas encore d'évaluation
- Cours8Microprocesseurs ARM PDFDocument48 pagesCours8Microprocesseurs ARM PDFZied HouanebPas encore d'évaluation
- Chapitre 9 Les Timers en MikrocDocument14 pagesChapitre 9 Les Timers en MikrocRadwane LourhmatiPas encore d'évaluation
- Projet Électronique - Serrure Codée À Base Du Microcontrôleur PIC16F877Document14 pagesProjet Électronique - Serrure Codée À Base Du Microcontrôleur PIC16F877abdouPas encore d'évaluation
- TP MicrowindDocument12 pagesTP Microwindinfobadrino75% (4)
- Exercice 0:: Tp1: Architecture Des MicrocontroleursDocument3 pagesExercice 0:: Tp1: Architecture Des MicrocontroleursأمينPas encore d'évaluation
- TD1 Micro-1Document2 pagesTD1 Micro-1marwenPas encore d'évaluation
- Oscillateurs SinusoidauxDocument24 pagesOscillateurs SinusoidauxMohammad Hassoun100% (1)
- Les Pic 16F877Document14 pagesLes Pic 16F877Haythem FerjaniPas encore d'évaluation
- Livret de La formation-ENSA PDFDocument43 pagesLivret de La formation-ENSA PDFOtman Chakkor100% (1)
- TD 35 Corrigé - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - Compteur PDFDocument4 pagesTD 35 Corrigé - Systèmes Séquentiels - GRAFCET - Structure Particulière - Grafcet Partiel - Compteur PDFDivin MakitaPas encore d'évaluation
- Mise en Route Du Compilateur MPLAB XC8Document11 pagesMise en Route Du Compilateur MPLAB XC8nawzatPas encore d'évaluation
- Chapitre 6 Amplificateur de PuissanceDocument11 pagesChapitre 6 Amplificateur de PuissanceMc R-OnePas encore d'évaluation
- Architecture Des Systèmes À Microprocesseur TP N°2: Timer / Génération de Signal PWMDocument20 pagesArchitecture Des Systèmes À Microprocesseur TP N°2: Timer / Génération de Signal PWMAwatef MessaoudiPas encore d'évaluation
- MODULE Microcontroleur MMOAMPADocument131 pagesMODULE Microcontroleur MMOAMPAMycompte HukkersPas encore d'évaluation
- Pic 16 FDocument20 pagesPic 16 FMarie MimiiPas encore d'évaluation
- Initiation Aux Microcontrôleurs: Application Au 68HC11: Chapitre 3Document11 pagesInitiation Aux Microcontrôleurs: Application Au 68HC11: Chapitre 3Salma sahmadPas encore d'évaluation
- Chetti WalidDocument96 pagesChetti WalidDhaker LazregPas encore d'évaluation
- Interface Serie Programmable - ACIA 6850Document10 pagesInterface Serie Programmable - ACIA 6850Lynda Tli67% (3)
- TP 1, Initiation A La Programmation Du Pic 16F877A Premiere Approche Des Logiciels UtilisesDocument6 pagesTP 1, Initiation A La Programmation Du Pic 16F877A Premiere Approche Des Logiciels UtilisesNaima BajouPas encore d'évaluation
- TP Fpga Cyclone2Document3 pagesTP Fpga Cyclone2red-allPas encore d'évaluation
- TP Can CnaDocument8 pagesTP Can CnaJOSLINPas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Chapitre 6 Les TimersDocument4 pagesChapitre 6 Les TimersReda LhajPas encore d'évaluation
- Tp1 Arduino ProteusDocument6 pagesTp1 Arduino ProteusSaida HalouiPas encore d'évaluation
- TP01Document12 pagesTP01DixPas encore d'évaluation
- Compteur SYN A2-2 2020Document8 pagesCompteur SYN A2-2 2020basmaPas encore d'évaluation
- Tutoriel STM32Document11 pagesTutoriel STM32Dorsaf RhoumaPas encore d'évaluation
- Cours - Composants Logiques Programmables Et VHDLDocument141 pagesCours - Composants Logiques Programmables Et VHDLYoussef Elalaoui0% (1)
- 02 - Microcontroleur de La Famille PIC PDFDocument59 pages02 - Microcontroleur de La Famille PIC PDFFarid Afifi100% (1)
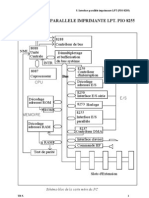
- Programmation de L'interface ParallèleDocument10 pagesProgrammation de L'interface ParallèleAbdeltif BelquorchiPas encore d'évaluation
- Nez Électronique: Un appareil innovant fournit aux humains un odorat puissantD'EverandNez Électronique: Un appareil innovant fournit aux humains un odorat puissantPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Taouli Sidiahmed Polycopie TPDocument96 pagesTaouli Sidiahmed Polycopie TPabfstbmsod100% (1)
- LE 2012 Archivage PDFDocument199 pagesLE 2012 Archivage PDFHocine AbdelhakPas encore d'évaluation
- Banc Capteurs H 3840Document1 pageBanc Capteurs H 3840abfstbmsodPas encore d'évaluation
- Travaux Pratiques Les CapteursDocument44 pagesTravaux Pratiques Les CapteursabfstbmsodPas encore d'évaluation
- 9 Reseau PVDocument39 pages9 Reseau PVabfstbmsodPas encore d'évaluation
- Mémoire BAKO J M 2ie M2 GEERDocument56 pagesMémoire BAKO J M 2ie M2 GEERabfstbmsodPas encore d'évaluation
- Memoir FinaleDocument52 pagesMemoir FinaleabfstbmsodPas encore d'évaluation
- Bessour Saad PfeDocument136 pagesBessour Saad PfeabfstbmsodPas encore d'évaluation
- Systèmes PhotovoltaïquesDocument23 pagesSystèmes PhotovoltaïquesabfstbmsodPas encore d'évaluation
- Brahmi 8 Commandes OnduleurDocument97 pagesBrahmi 8 Commandes OnduleurabfstbmsodPas encore d'évaluation
- Exercices-Corr HacheurDocument11 pagesExercices-Corr HacheurNihad Aghbalou80% (5)
- 6 Reseau PVDocument54 pages6 Reseau PVabfstbmsodPas encore d'évaluation
- TDs Électricité2022-2023Document82 pagesTDs Électricité2022-2023abfstbmsodPas encore d'évaluation
- coursBOUYAKOUBIsmail PDFDocument70 pagescoursBOUYAKOUBIsmail PDFقيرع عمرPas encore d'évaluation
- TheseDocument109 pagesTheseabfstbmsodPas encore d'évaluation
- Onduleur MLI 3 PhaseDocument175 pagesOnduleur MLI 3 PhaseabfstbmsodPas encore d'évaluation
- Brahmi Template PHDocument52 pagesBrahmi Template PHabfstbmsodPas encore d'évaluation
- IF ENERGIE Mod7 Raccordement Reseau FRDocument12 pagesIF ENERGIE Mod7 Raccordement Reseau FRabfstbmsodPas encore d'évaluation
- Ms ELN Goual+AbbasDocument154 pagesMs ELN Goual+AbbasabfstbmsodPas encore d'évaluation
- rakotoarisoaArmandJC ESPA M2 06Document135 pagesrakotoarisoaArmandJC ESPA M2 06abfstbmsodPas encore d'évaluation
- M L LouazeneDocument5 pagesM L LouazeneAnonymous DjA2T2I2100% (1)
- 2 Reseau PV DetailsDocument186 pages2 Reseau PV DetailsabfstbmsodPas encore d'évaluation
- Fin Du Projet11Document75 pagesFin Du Projet11abfstbmsodPas encore d'évaluation
- Mem Final21Document104 pagesMem Final21abfstbmsodPas encore d'évaluation
- Brahmi 2Document76 pagesBrahmi 2abfstbmsodPas encore d'évaluation
- Brahmi88MLI Calculée OnduleurDocument104 pagesBrahmi88MLI Calculée OnduleurabfstbmsodPas encore d'évaluation
- Brahmi DcacDocument90 pagesBrahmi DcacabfstbmsodPas encore d'évaluation
- Moam - Info - I Onduleur A Commande Symetrique TP n14 Simulation - 59f3baa51723dd487d95b524Document2 pagesMoam - Info - I Onduleur A Commande Symetrique TP n14 Simulation - 59f3baa51723dd487d95b524abfstbmsodPas encore d'évaluation
- Moam - Info - tp10 Simulation Onduleur A 4 Interrupteurs - 59f3baa71723dd487d95b525Document3 pagesMoam - Info - tp10 Simulation Onduleur A 4 Interrupteurs - 59f3baa71723dd487d95b525abfstbmsodPas encore d'évaluation
- Mge 00022Document80 pagesMge 00022abfstbmsodPas encore d'évaluation
- Serie IP TD 2Document2 pagesSerie IP TD 2Nadjah NamanePas encore d'évaluation
- TD1 1Document6 pagesTD1 1Jihane ZrPas encore d'évaluation
- Application DistribuéDocument40 pagesApplication DistribuésamvipPas encore d'évaluation
- Manuel de Procedure Screen Flanders 2020Document30 pagesManuel de Procedure Screen Flanders 2020IDEA SUARLPas encore d'évaluation
- FDP - ITN Security Expert PDFDocument2 pagesFDP - ITN Security Expert PDFBriand Eric DUALAPas encore d'évaluation
- Excel Ex1Document1 pageExcel Ex1BiroussPas encore d'évaluation
- TD 2: Architecture Des Ordinateurs: Exercice 1Document2 pagesTD 2: Architecture Des Ordinateurs: Exercice 1ahmed fathallahPas encore d'évaluation
- Cours Initiation Info L1 2015 Etudiant-1Document81 pagesCours Initiation Info L1 2015 Etudiant-1albertyeo6Pas encore d'évaluation
- ISO#IEC Guide 99 2007 (E#F) - Character PDF DocumentDocument7 pagesISO#IEC Guide 99 2007 (E#F) - Character PDF DocumentHalimPas encore d'évaluation
- 2021 - We Advocacy - Add-In v. Strandard - Procédure de Déploiement FRDocument33 pages2021 - We Advocacy - Add-In v. Strandard - Procédure de Déploiement FRChrisPas encore d'évaluation
- Chap - 04 - Correction des systèmes échantillonnés-١Document44 pagesChap - 04 - Correction des systèmes échantillonnés-١Toutou KHATRIPas encore d'évaluation
- TD1 Culture Et Compétences Numérique - 1SG - ABOUDI Med Ali - S2Document2 pagesTD1 Culture Et Compétences Numérique - 1SG - ABOUDI Med Ali - S2Idriss Mrayah0% (2)
- Diagramme Etat TransitionDocument14 pagesDiagramme Etat TransitionHajer ZitouniPas encore d'évaluation
- Outils de Base Expose 1Document15 pagesOutils de Base Expose 1FrisnellePas encore d'évaluation
- Rapport PFE - CopieDocument10 pagesRapport PFE - CopieWà LîdPas encore d'évaluation
- 7282 Repere Pour La Formation Bac Pro SNDocument77 pages7282 Repere Pour La Formation Bac Pro SNpierre dumarchandPas encore d'évaluation
- Chapitre 5Document37 pagesChapitre 5Lamia BrioualPas encore d'évaluation
- Tarifsept2022 Carte JetableRecharge ParisDocument1 pageTarifsept2022 Carte JetableRecharge ParisS DPas encore d'évaluation
- Zephyr - Communication MCU-MPUDocument11 pagesZephyr - Communication MCU-MPURomaysa jijiPas encore d'évaluation
- ITIL4 - Fundamentals - Questions Et RéponsesDocument17 pagesITIL4 - Fundamentals - Questions Et RéponsesScribdTranslationsPas encore d'évaluation
- Résumer Linux IdosrDocument9 pagesRésumer Linux IdosrfakhreddinePas encore d'évaluation
- Cours Système Commutation Intéressant NullDocument77 pagesCours Système Commutation Intéressant Nulltonye joelPas encore d'évaluation
- Cloud ComputingDocument9 pagesCloud Computingkameni olivierPas encore d'évaluation
- Sujet PFE PoitiersDocument2 pagesSujet PFE PoitiersOmar 95Pas encore d'évaluation
- Cours JavascriptDocument50 pagesCours JavascriptRap Hip hopPas encore d'évaluation
- RevisezDocument30 pagesRevisezGérald Akré AkéPas encore d'évaluation
- TP 3 Les MatricesDocument6 pagesTP 3 Les MatricesHAMZA TAHIRIPas encore d'évaluation
- Implémentation D'un Cyberattaque DoS Avec Le Framework MetasploitDocument19 pagesImplémentation D'un Cyberattaque DoS Avec Le Framework MetasploitDi Rosaire Magnificat DIABANGOUAYA YENGOZOPas encore d'évaluation
- Masterys GP 15 - Tender Document - 2012-05 - Ted - FRDocument14 pagesMasterys GP 15 - Tender Document - 2012-05 - Ted - FRkarim ghePas encore d'évaluation
- Alain Tanoh - CV - Version 3Document1 pageAlain Tanoh - CV - Version 3Jukolay 190Pas encore d'évaluation