Vous aimerez peut-être aussi
- OGUCDocument351 pagesOGUCnianmole50% (2)
- Mezclas Asfálticas en CalienteDocument29 pagesMezclas Asfálticas en CalienteLeonardo Gustavo Cadena MaciasPas encore d'évaluation
- Cuestionario Evaluacion Final de Grado Licencia Tipo e RegularDocument4 pagesCuestionario Evaluacion Final de Grado Licencia Tipo e RegularJavier Verdesoto GroupvsaPas encore d'évaluation
- Modernización Del Transporte Público - Dario HidalgoDocument33 pagesModernización Del Transporte Público - Dario HidalgoDaniel Pérez-Rodríguez100% (1)
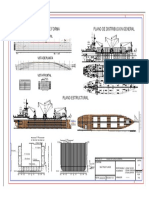
- Plano Estructuras II-ModelDocument1 pagePlano Estructuras II-ModelStalin ZapataPas encore d'évaluation
- Fisica y Quimica 03 Lucero Aquino SenatiDocument9 pagesFisica y Quimica 03 Lucero Aquino SenatiGheremy SilvaPas encore d'évaluation
- Global AirDocument22 pagesGlobal AirJosué SotoPas encore d'évaluation
- Anexo - APUDocument25 pagesAnexo - APUneilymar0% (1)
- Proyectos AnalogosDocument21 pagesProyectos AnalogosEder Galeana100% (1)
- Capitulo III. - Cubicacion de Movimiento de TierrasDocument14 pagesCapitulo III. - Cubicacion de Movimiento de TierrasIdelso Barrantes FzPas encore d'évaluation
- Ilovepdf MergedDocument25 pagesIlovepdf MergedRodrigo Alonso GalindoPas encore d'évaluation
- Movilidadelectrica Estudio ES Web LR PDFDocument60 pagesMovilidadelectrica Estudio ES Web LR PDFAixer Alexander PadronPas encore d'évaluation
- R.d.01.06.2021.tramo 2.Document1 pageR.d.01.06.2021.tramo 2.Vladimir cruz sosaPas encore d'évaluation
- Preguntas IPV Preguntas IPVDocument12 pagesPreguntas IPV Preguntas IPVNuria Castro100% (1)
- Evaluacion Del Aprendizaje Grado Undecimo 1PDocument5 pagesEvaluacion Del Aprendizaje Grado Undecimo 1PJësiik RiivëräPas encore d'évaluation
- Tarea 4.2 - Camiones Mineros ArticuladosDocument23 pagesTarea 4.2 - Camiones Mineros ArticuladosFelix Juan Valentin Paucar Mamani0% (1)
- Chenggong CG 956 CDocument2 pagesChenggong CG 956 CLechu SallesPas encore d'évaluation
- Guía CiclovíasDocument43 pagesGuía CiclovíasClaudia Garrido RivasPas encore d'évaluation
- Intervenciones Urbanas en CiudadesDocument88 pagesIntervenciones Urbanas en CiudadesEDITH ZULEMAPas encore d'évaluation
- Cuaderno 5 El Handling de Los Aviones-01Document146 pagesCuaderno 5 El Handling de Los Aviones-01Campos Lopez Sealtiel UrielPas encore d'évaluation
- Monografia TransferenciaDocument31 pagesMonografia TransferenciaJavier Vega BuenoPas encore d'évaluation
- Aeropuerto HuanucoDocument22 pagesAeropuerto HuanucoHuaquisto BrigPas encore d'évaluation
- Operaciones UnitariasDocument16 pagesOperaciones UnitariasJORGE PEÑAPas encore d'évaluation
- Brochure 600 - Uco 600 Carta de CreditoDocument48 pagesBrochure 600 - Uco 600 Carta de CreditoMarcelo Pumainca RozasPas encore d'évaluation
- Carretillas ElevadorasDocument3 pagesCarretillas ElevadorasByron NaranjoPas encore d'évaluation
- AUTOMOVILDocument2 pagesAUTOMOVILEmanuel CopiadoraPas encore d'évaluation
- Calificación de EquiposDocument12 pagesCalificación de Equiposrosebelle1906Pas encore d'évaluation
- Exxal 8 (Iso - Octanol)Document10 pagesExxal 8 (Iso - Octanol)mario.Pas encore d'évaluation
- Introducción A Las CimentacionesDocument3 pagesIntroducción A Las CimentacionesJhorman Calderin Llorente100% (2)
- Coeficientes y PrediseñoDocument17 pagesCoeficientes y PrediseñoRicardo ZamoranoPas encore d'évaluation