Vous aimerez peut-être aussi
- Devoir de Synthèse N°3 Avec Correction - Sciences Physiques - Bac Technique (2015-2016) MR Ridha SlimiDocument7 pagesDevoir de Synthèse N°3 Avec Correction - Sciences Physiques - Bac Technique (2015-2016) MR Ridha SlimiMeriam KooliPas encore d'évaluation
- Problèmes de Conduction Avec RégénérationDocument3 pagesProblèmes de Conduction Avec RégénérationMeriam KooliPas encore d'évaluation
- Les AilettesDocument4 pagesLes AilettesIsmail Mebarki80% (5)
- Olivier Martin-L'enquête Et Ses Méthodes. L'analyse de Données Quantitatives-A. Colin (2009) PDFDocument130 pagesOlivier Martin-L'enquête Et Ses Méthodes. L'analyse de Données Quantitatives-A. Colin (2009) PDFIsmaîl TemsamaniPas encore d'évaluation
- TD 05 Infographie IMAC1Document4 pagesTD 05 Infographie IMAC1Meriam KooliPas encore d'évaluation
- Notions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Document140 pagesNotions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Salma Brb83% (6)
- TD TNS v2Document15 pagesTD TNS v2Moussa Seck0% (1)
- Coorigé Examen Transfert Thermqique 2016-2017Document3 pagesCoorigé Examen Transfert Thermqique 2016-2017fyras telminiPas encore d'évaluation
- TF06 Conduction 02Document1 pageTF06 Conduction 02Meriam KooliPas encore d'évaluation
- Poly ADDocument119 pagesPoly ADقرة عينيPas encore d'évaluation
- Correction TD 1Document4 pagesCorrection TD 1SAFOPas encore d'évaluation
- Ti TD Ees4Document12 pagesTi TD Ees4Meriam KooliPas encore d'évaluation
- Livre MDF2005Document124 pagesLivre MDF2005Meriam KooliPas encore d'évaluation
- TD 1Document1 pageTD 1Anonymous Ps6TbYt2100% (1)
- Fourier 0001Document3 pagesFourier 0001Meriam KooliPas encore d'évaluation
- TP1Document3 pagesTP1Widad KarachiPas encore d'évaluation
- Résume Mécanique Des FluidesDocument9 pagesRésume Mécanique Des Fluidessimo100% (4)
- Ti Sujet tp1Document5 pagesTi Sujet tp1Meriam KooliPas encore d'évaluation
- Examen Traitement D'image, Univ M'SilaDocument2 pagesExamen Traitement D'image, Univ M'SilaMeriam Kooli100% (2)
- TD 2 Thermodynamique PDFDocument2 pagesTD 2 Thermodynamique PDFKhalid Zeg100% (2)
- TD 1 ThermodynamiqueDocument2 pagesTD 1 ThermodynamiqueamiramPas encore d'évaluation
- Mecanique Des Fluides 2016Document27 pagesMecanique Des Fluides 2016saif100% (1)
- TD 2 Thermodynamique Corrigé PDFDocument4 pagesTD 2 Thermodynamique Corrigé PDFamiramPas encore d'évaluation
- ThermodynamiqueDocument3 pagesThermodynamiqueossamaPas encore d'évaluation
- EX16Document1 pageEX16Meriam KooliPas encore d'évaluation
- 52.0.espace de Banach Et Convergence en Norme Des SeriesDocument2 pages52.0.espace de Banach Et Convergence en Norme Des SeriesMeriam KooliPas encore d'évaluation
- 41.0.theoremes de BanachDocument4 pages41.0.theoremes de BanachMeriam KooliPas encore d'évaluation
- 64.0.ouverts Et Fermes en Topologie GeneraleDocument4 pages64.0.ouverts Et Fermes en Topologie GeneraleMeriam KooliPas encore d'évaluation
- Programmation Orientée Objets: Exercice 1Document2 pagesProgrammation Orientée Objets: Exercice 1Meriam KooliPas encore d'évaluation
- Pulsation CardDocument5 pagesPulsation CardMeriam KooliPas encore d'évaluation
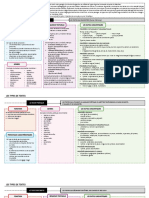
- Types TextesDocument8 pagesTypes TextesTheopatre MrPas encore d'évaluation
- Wang Yimiao 2012 ArchivageDocument312 pagesWang Yimiao 2012 ArchivagecenderillastoryPas encore d'évaluation
- P Oral 050413-ADocument19 pagesP Oral 050413-AFidele AGOHLIPas encore d'évaluation
- TP PliageDocument13 pagesTP Pliagechaudronnier100% (1)
- Série D'exercices Sur L'immunitéDocument6 pagesSérie D'exercices Sur L'immunitéSamira ElkamelPas encore d'évaluation
- Cinetique-chimique-Exercices 01 CompressedDocument4 pagesCinetique-chimique-Exercices 01 Compressedelmadani boutayebPas encore d'évaluation
- BalrogDocument3 pagesBalrogGERARD MANVUCAPas encore d'évaluation
- Cezanne, Sa Vie, Son OeuvreDocument55 pagesCezanne, Sa Vie, Son OeuvreOctavio CoxPas encore d'évaluation
- La Bible Du DiableDocument2 pagesLa Bible Du Diablepapitolove100% (4)
- Le Chapelet Secret Du Saint-Sacrement de La Mère Agnès ArnauldDocument11 pagesLe Chapelet Secret Du Saint-Sacrement de La Mère Agnès ArnauldspiennaPas encore d'évaluation
- FR ACI Fiches Outils 08Document2 pagesFR ACI Fiches Outils 08IBOUPas encore d'évaluation
- Devoir Francais - Exercices de Remédiation Grammaire - Juxt, Coord, Sub.Document2 pagesDevoir Francais - Exercices de Remédiation Grammaire - Juxt, Coord, Sub.Nutious NutiousPas encore d'évaluation
- MercatorDocument3 pagesMercatorMendouaPas encore d'évaluation
- PSI PHYSIQUE CCP 1 2002.extraitDocument4 pagesPSI PHYSIQUE CCP 1 2002.extraitLoundou ortegaPas encore d'évaluation
- La Force Du SilenceDocument10 pagesLa Force Du Silencegodwin lawadanPas encore d'évaluation
- Présentation HSE L'abecedaireDocument23 pagesPrésentation HSE L'abecedairekayitesikoumouPas encore d'évaluation
- Activité 4Document3 pagesActivité 4youness10100Pas encore d'évaluation
- 324 1 Traiter Incontinence Anale Des Exercices A FaireDocument3 pages324 1 Traiter Incontinence Anale Des Exercices A Fairerommyy mballaPas encore d'évaluation
- F2021065Document28 pagesF2021065Kada Ben youcefPas encore d'évaluation
- GEO6 Geo Analytique1 PDFDocument3 pagesGEO6 Geo Analytique1 PDFAhmed benabdelkaderPas encore d'évaluation
- ADIMAP 17h10 Lhoucine SabiriDocument22 pagesADIMAP 17h10 Lhoucine SabiriFatima Zohra BizbizPas encore d'évaluation