Vous aimerez peut-être aussi
- Etude Du Microcontrleur Pic16f84 160919133655Document72 pagesEtude Du Microcontrleur Pic16f84 160919133655فدوى غانيPas encore d'évaluation
- Les Microcontrôleurs PICDocument16 pagesLes Microcontrôleurs PICdidi12Pas encore d'évaluation
- Cours Microcontroleur Pic 16f84Document15 pagesCours Microcontroleur Pic 16f84Khalifa BakkarPas encore d'évaluation
- MCIL3 - C - Chapitre 2 - IIDocument8 pagesMCIL3 - C - Chapitre 2 - IITurbo NSXPas encore d'évaluation
- Chapitre III Fonctionnement de PIC 16F84Document24 pagesChapitre III Fonctionnement de PIC 16F84Sanae BOUNOUAPas encore d'évaluation
- Compte Rendu Du TP PIC16F877 Par AIMANE BOURASSDocument13 pagesCompte Rendu Du TP PIC16F877 Par AIMANE BOURASSAyman Brs100% (1)
- 2 Introduction Sur Les MicrocontroleursDocument21 pages2 Introduction Sur Les Microcontroleursmiss théciPas encore d'évaluation
- Chapitre 4Document37 pagesChapitre 4Ahmed JguirimPas encore d'évaluation
- Compte Rendu Mooc Semaine 2Document4 pagesCompte Rendu Mooc Semaine 2TanankemPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 19Document15 pagesCours Microcontrôleur Microprocesseur 19Med EL JaouhariPas encore d'évaluation
- TP Initiation Langage C Avec PICDocument11 pagesTP Initiation Langage C Avec PICLam NovoxPas encore d'évaluation
- 1774853Document32 pages1774853meryemPas encore d'évaluation
- Mi 2Document18 pagesMi 2pedroPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 51Document18 pagesCours Microcontrôleur Microprocesseur 51NasriMohsenPas encore d'évaluation
- Chapitre 2 Introduction Sur Les MicrocontroleursDocument15 pagesChapitre 2 Introduction Sur Les MicrocontroleursMedPas encore d'évaluation
- MicroDocument4 pagesMicroKOUASSI INNOCENT YAOPas encore d'évaluation
- Chapitre 2 Microcontroleur Pic 16f877Document8 pagesChapitre 2 Microcontroleur Pic 16f877Redouane AmianPas encore d'évaluation
- Microcontrôleur Famille PIC 16oDocument10 pagesMicrocontrôleur Famille PIC 16oAbdellah Faqdani100% (1)
- Rapport ÉclairageDocument29 pagesRapport ÉclairageHamza EL HASSAKPas encore d'évaluation
- Programmation en C Du Microcontrôlleur PIC16F877Document41 pagesProgrammation en C Du Microcontrôlleur PIC16F877Hachemi Bhe88% (33)
- Microcontroleur CompressDocument78 pagesMicrocontroleur CompressFrank EffeuzePas encore d'évaluation
- Les Microcontrôleurs PIC de Microchip RéorganiséDocument27 pagesLes Microcontrôleurs PIC de Microchip Réorganisésamuel akaPas encore d'évaluation
- AhmedDocument15 pagesAhmedM1 ImiPas encore d'évaluation
- Chap7 PIC16F84Document12 pagesChap7 PIC16F84keylog100% (1)
- Pic16f877 150125131206 Conversion Gate01Document44 pagesPic16f877 150125131206 Conversion Gate01Harzly HajerPas encore d'évaluation
- TP Initiation Langage C Avec Un Microcontrôleur PICDocument11 pagesTP Initiation Langage C Avec Un Microcontrôleur PICAbdoulrazakPas encore d'évaluation
- chapitre 5 microcontroleursDocument28 pageschapitre 5 microcontroleursbenachour ismailPas encore d'évaluation
- Cours_Microcontroleurs_-_Chapitre_IIDocument43 pagesCours_Microcontroleurs_-_Chapitre_IIELIASPas encore d'évaluation
- Étude Et Réalisation D'un Dispositif D'ouverture Automatique D'un Garage Et D'éclairage Intelligent À Base D'un PICDocument32 pagesÉtude Et Réalisation D'un Dispositif D'ouverture Automatique D'un Garage Et D'éclairage Intelligent À Base D'un PICDina Tvadrovski75% (8)
- Pic 16f877 RapportDocument16 pagesPic 16f877 RapportOmar Medbouh100% (2)
- Base Des Microcontrôleur2021Document62 pagesBase Des Microcontrôleur2021Ayman LamzouriPas encore d'évaluation
- République Algérienne Démocratique Et Populaire: TP 2: Initialisation Au Développement Des Cartes Avec PIC 16F84ADocument10 pagesRépublique Algérienne Démocratique Et Populaire: TP 2: Initialisation Au Développement Des Cartes Avec PIC 16F84Aclouse12Pas encore d'évaluation
- Cours Projet Electronique 1Document40 pagesCours Projet Electronique 1Yàs SérPas encore d'évaluation
- Chapitre2 SE ARCHITECTURE DES MICROCONTROLLEURSDocument24 pagesChapitre2 SE ARCHITECTURE DES MICROCONTROLLEURSKarima ChakerPas encore d'évaluation
- Les Microcontroleur (Traduction)Document24 pagesLes Microcontroleur (Traduction)Abcp CorpPas encore d'évaluation
- Les Pic 16F877Document14 pagesLes Pic 16F877Haythem FerjaniPas encore d'évaluation
- 02 - Microcontroleur de La Famille PIC PDFDocument59 pages02 - Microcontroleur de La Famille PIC PDFFarid Afifi100% (1)
- Un Microcontrôleur Est Un Circuit Intégré Rassemblant Dans Un Même Boitier Un MicroprocesseurDocument9 pagesUn Microcontrôleur Est Un Circuit Intégré Rassemblant Dans Un Même Boitier Un MicroprocesseuromarPas encore d'évaluation
- Presentation Pic 16f84a - New1Document6 pagesPresentation Pic 16f84a - New1Davy Jean DrahaPas encore d'évaluation
- Le Microcontroleur PIC16F876Document13 pagesLe Microcontroleur PIC16F876hmema13Pas encore d'évaluation
- MicrocontroleurDocument12 pagesMicrocontroleurGaddour TriguiPas encore d'évaluation
- Travaux Pratiques - Microprocesseurs MicrocontrôleursDocument11 pagesTravaux Pratiques - Microprocesseurs MicrocontrôleursMila zPas encore d'évaluation
- C Avancé 2022Document178 pagesC Avancé 2022Hamza El mamounPas encore d'évaluation
- ProjetDocument50 pagesProjetKarim Baghdadi100% (1)
- Le PIC 16F628 Resume JCDocument5 pagesLe PIC 16F628 Resume JChassna ait aliPas encore d'évaluation
- Chapitre 4Document13 pagesChapitre 4bouchenebPas encore d'évaluation
- Pic 16F84 2Document40 pagesPic 16F84 2felkirPas encore d'évaluation
- Microcontroeluers AvancésDocument83 pagesMicrocontroeluers AvancésFeesher DragwelPas encore d'évaluation
- PIC16F84Document22 pagesPIC16F84Rida bellarranePas encore d'évaluation
- Cours LST PIC 16F84 2019-2020Document116 pagesCours LST PIC 16F84 2019-2020Mouad Thf0% (1)
- MicrocontroleurDocument6 pagesMicrocontroleurFadil TelejeuPas encore d'évaluation
- TD2 Corrigée PDocument5 pagesTD2 Corrigée Pfarid regraguiPas encore d'évaluation
- Chapitre II-nourDocument17 pagesChapitre II-nourbelazouguiPas encore d'évaluation
- Chapitre II (Microcontrolleurs)Document28 pagesChapitre II (Microcontrolleurs)Rayene RinaPas encore d'évaluation
- Contrats et marchés publics de défenseD'EverandContrats et marchés publics de défenseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Cryptographie Quantique: Les superpuissances mondiales sont engagées dans une course au développement d'armes quantiques, qui modifieraient fondamentalement la nature des conflitsD'EverandCryptographie Quantique: Les superpuissances mondiales sont engagées dans une course au développement d'armes quantiques, qui modifieraient fondamentalement la nature des conflitsPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Calcul À Usage Général Sur Les Unités De Traitement Graphique: Utilisation de l'unité de traitement graphique (GPU) pour effectuer des calculs qui sont normalement effectués par le CPUD'EverandCalcul À Usage Général Sur Les Unités De Traitement Graphique: Utilisation de l'unité de traitement graphique (GPU) pour effectuer des calculs qui sont normalement effectués par le CPUPas encore d'évaluation
- TP - Conv (Finale)Document29 pagesTP - Conv (Finale)amaniPas encore d'évaluation
- Conversion TP3 Compte RenduDocument12 pagesConversion TP3 Compte RenduamaniPas encore d'évaluation
- Correction Exos Qté MVTDocument7 pagesCorrection Exos Qté MVTamaniPas encore d'évaluation
- SodaPDF-converted-Initiation - MATLAB - Comte Rendu - tp1Document5 pagesSodaPDF-converted-Initiation - MATLAB - Comte Rendu - tp1amaniPas encore d'évaluation
- Trait Num Du Sig (CMPT Rendue tp2) PDFDocument6 pagesTrait Num Du Sig (CMPT Rendue tp2) PDFamaniPas encore d'évaluation
- DocumentDocument19 pagesDocumentamaniPas encore d'évaluation
- Conversion TP1 Compte RenduDocument7 pagesConversion TP1 Compte RenduamaniPas encore d'évaluation
- Trait Num Du Sig (CMPT Rendue tp2) PDFDocument6 pagesTrait Num Du Sig (CMPT Rendue tp2) PDFamaniPas encore d'évaluation
- TD Transformée en ZDocument20 pagesTD Transformée en ZamaniPas encore d'évaluation
- Devoir Corrigé de Synthèse N°1 - Sciences Physiques - Bac Math (2015-2016) MR Benjeddou Rachid PDFDocument10 pagesDevoir Corrigé de Synthèse N°1 - Sciences Physiques - Bac Math (2015-2016) MR Benjeddou Rachid PDFMustapha ElhafiPas encore d'évaluation
- SodaPDF-converted-Trait Num Du Sig (CMPT Rendue tp2)Document6 pagesSodaPDF-converted-Trait Num Du Sig (CMPT Rendue tp2)amaniPas encore d'évaluation
- Dynamic ModelDocument54 pagesDynamic ModelamaniPas encore d'évaluation
- Correction ExamenTS20122013 enDocument8 pagesCorrection ExamenTS20122013 enamaniPas encore d'évaluation
- Initiation - MATLAB - Comte Rendu - tp1Document5 pagesInitiation - MATLAB - Comte Rendu - tp1amaniPas encore d'évaluation
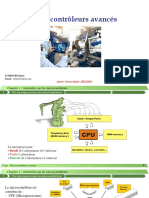
- Chapitre I STM32 Programmation GPIO ParDocument59 pagesChapitre I STM32 Programmation GPIO ParamaniPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiDocument6 pagesDevoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiamaniPas encore d'évaluation
- Langage C Embarque PDFDocument110 pagesLangage C Embarque PDFMajid MlaouhiaPas encore d'évaluation
- Exemples Transformée en ZDocument9 pagesExemples Transformée en ZamaniPas encore d'évaluation
- Remarques Et Astuces de Programmation en AssembleurDocument31 pagesRemarques Et Astuces de Programmation en AssembleuramaniPas encore d'évaluation
- Chap 2Document10 pagesChap 2amaniPas encore d'évaluation
- AilettersDocument51 pagesAilettersamaniPas encore d'évaluation
- Proba 1Document4 pagesProba 1amaniPas encore d'évaluation
- Proba Continue3Document3 pagesProba Continue3amaniPas encore d'évaluation
- Cours - Technologie L'Analyse Descendante (SADT) - 2ème Sciences (2014-2015) MR Rafik Ben AmorDocument8 pagesCours - Technologie L'Analyse Descendante (SADT) - 2ème Sciences (2014-2015) MR Rafik Ben AmorYoussef YouriPas encore d'évaluation
- Phrases Et Expressions Utiles Pour Un Exposé Oral RéussiDocument1 pagePhrases Et Expressions Utiles Pour Un Exposé Oral RéussiPFER100% (3)
- Remarques Et Astuces de Programmation en AssembleurDocument31 pagesRemarques Et Astuces de Programmation en AssembleuramaniPas encore d'évaluation
- Phrases Et Expressions Utiles Pour Un Exposé Oral RéussiDocument1 pagePhrases Et Expressions Utiles Pour Un Exposé Oral RéussiPFER100% (3)
- 6 CristallographieDocument29 pages6 CristallographieamaniPas encore d'évaluation
- Proba Continue3Document3 pagesProba Continue3amaniPas encore d'évaluation
- Programmation Oriente-Objet-Java (1167)Document73 pagesProgrammation Oriente-Objet-Java (1167)pape saliou wadePas encore d'évaluation
- AP4.1 ElevesDocument20 pagesAP4.1 Elevessamsoum1Pas encore d'évaluation
- TP2 Virtualisation DockerDocument10 pagesTP2 Virtualisation DockerFarah Hkiri100% (1)
- MplsDocument100 pagesMplsFadhilaCelinePas encore d'évaluation
- INFO1Document6 pagesINFO1Zouhir KasmiPas encore d'évaluation
- TélégestionDocument3 pagesTélégestionSouley TANKOANOPas encore d'évaluation
- LivreBlanc SDWAN CiscoMeraki APIXIT-1Document19 pagesLivreBlanc SDWAN CiscoMeraki APIXIT-1Emeric KalkoumdoPas encore d'évaluation
- Plaquette Geobox 2022Document3 pagesPlaquette Geobox 2022Ricky SetiawanPas encore d'évaluation
- Rapport de PFEDocument25 pagesRapport de PFEHajer YousfiPas encore d'évaluation
- 335 QGIS Et Outils Generiques Baghdadi 1 TDMDocument6 pages335 QGIS Et Outils Generiques Baghdadi 1 TDMclaudioPas encore d'évaluation
- Examen Partiel 2019Document9 pagesExamen Partiel 2019Fatima EzzahraPas encore d'évaluation
- 5 qosRouteurCISCODocument5 pages5 qosRouteurCISCOSara JEBRIPas encore d'évaluation
- La Danse Des RobotsDocument10 pagesLa Danse Des RobotsArthur CHAPRONPas encore d'évaluation
- Cours - Architecture ch3Document60 pagesCours - Architecture ch3Hoody 05Pas encore d'évaluation
- Opens SLDocument10 pagesOpens SLfatma ajalaPas encore d'évaluation
- Fiche Questions-Réponses DTL Final CorrecDocument4 pagesFiche Questions-Réponses DTL Final CorrecNoa BPas encore d'évaluation
- TP Msdos AvancéDocument14 pagesTP Msdos Avancéa45Pas encore d'évaluation
- Compte Rendu ZimbraDocument50 pagesCompte Rendu ZimbraABBASSI RABAHPas encore d'évaluation
- Projet LabyrintheDocument7 pagesProjet LabyrintheEvan PaquePas encore d'évaluation
- TD Service RéseauxDocument8 pagesTD Service RéseauxViken BalianPas encore d'évaluation
- Acquisition LabviewDocument49 pagesAcquisition LabviewSarah ChahabPas encore d'évaluation
- Bonnes Pratiques de La Gestion Des Ressources Humaines - Guide MethodologiqueDocument119 pagesBonnes Pratiques de La Gestion Des Ressources Humaines - Guide MethodologiqueMoussa FofanaPas encore d'évaluation
- CHOUGDALI CoursAngularDocument154 pagesCHOUGDALI CoursAngularanas bougaiouarPas encore d'évaluation
- Chapitre 1 Introduction À La CybercriminalitéDocument62 pagesChapitre 1 Introduction À La CybercriminalitéDIPAMA MichelPas encore d'évaluation
- 25 Emploi de Temps Du 15 Au 20 Mai 2023Document9 pages25 Emploi de Temps Du 15 Au 20 Mai 2023Blaise KempesPas encore d'évaluation
- TD 1Document4 pagesTD 1arnaud olivierPas encore d'évaluation
- WINDEV Formation Windev PDFDocument3 pagesWINDEV Formation Windev PDFCertyouFormationPas encore d'évaluation
- Cours1 SEA2020Document5 pagesCours1 SEA2020Ahmed MedPas encore d'évaluation
- CV Younnes HassaniDocument1 pageCV Younnes HassaniAyoub OufadelPas encore d'évaluation
- CV Matthias Mercadal 2 1Document1 pageCV Matthias Mercadal 2 1api-541114452Pas encore d'évaluation