Vous aimerez peut-être aussi
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianD'EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianÉvaluation : 5 sur 5 étoiles5/5 (1)
- Leibniz Integral Rule - WikipediaDocument70 pagesLeibniz Integral Rule - WikipediaMannu Bhattacharya100% (1)
- Vector Field: Vector Fields On Subsets of Euclidean SpaceDocument8 pagesVector Field: Vector Fields On Subsets of Euclidean SpaceDiego VillalobosPas encore d'évaluation
- Line and SurfaceDocument40 pagesLine and SurfacesamiPas encore d'évaluation
- 3.3. Functions of Several VariablesDocument9 pages3.3. Functions of Several VariablesLopezinPas encore d'évaluation
- Worksheet On Vector Valued FunctionsDocument6 pagesWorksheet On Vector Valued FunctionsvietboiiPas encore d'évaluation
- Lecture 24: Divergence Theorem: RRR RR RR R RDocument3 pagesLecture 24: Divergence Theorem: RRR RR RR R RKen LimoPas encore d'évaluation
- Solutions of Complex VariableDocument85 pagesSolutions of Complex VariableDongala SwamyPas encore d'évaluation
- Application of Derivatives Maths Theory NotesDocument37 pagesApplication of Derivatives Maths Theory NotesHimanshu GuptaPas encore d'évaluation
- L1 Functions and Its NotationDocument16 pagesL1 Functions and Its NotationMiko2014Pas encore d'évaluation
- Unit Pfaffian Differential Equations: StructureDocument30 pagesUnit Pfaffian Differential Equations: StructureIrene WambuiPas encore d'évaluation
- Riccati EquationDocument4 pagesRiccati Equationletter_ashish4444Pas encore d'évaluation
- Partial DifferentiationDocument11 pagesPartial DifferentiationwewillburythemtooPas encore d'évaluation
- FALLSEM2019-20 MAT1011 ETH VL2019201005249 Reference Material II 19-Sep-2019 Solved-Problems Double-and-Triple-Integrals-2 PDFDocument18 pagesFALLSEM2019-20 MAT1011 ETH VL2019201005249 Reference Material II 19-Sep-2019 Solved-Problems Double-and-Triple-Integrals-2 PDFabhist chuhan100% (1)
- HL1Document74 pagesHL1Ahmad100% (1)
- Basel Problem ProofDocument7 pagesBasel Problem ProofCody JohnsonPas encore d'évaluation
- Classical Mechanics - Prof. Dipan Kumar GhoshDocument183 pagesClassical Mechanics - Prof. Dipan Kumar GhoshTushar GoyalPas encore d'évaluation
- Integration 110304071651 Phpapp01Document19 pagesIntegration 110304071651 Phpapp01Maan UsmanPas encore d'évaluation
- Introduction To The Notion of LimitDocument5 pagesIntroduction To The Notion of LimitYves SimonPas encore d'évaluation
- 1 SCHR Odinger's Equation: One-Dimensional, Time-Dependent VersionDocument9 pages1 SCHR Odinger's Equation: One-Dimensional, Time-Dependent VersionArpita AwasthiPas encore d'évaluation
- MAT101-Engineering Mathematics-I Differential Calculus-4: Rolle's Theorem StatementDocument11 pagesMAT101-Engineering Mathematics-I Differential Calculus-4: Rolle's Theorem StatementTorcoxk Namgay100% (1)
- Chapter 12 SolutionsDocument6 pagesChapter 12 SolutionsAli IPas encore d'évaluation
- 2 Vector AlgebraDocument30 pages2 Vector Algebrashaannivas100% (1)
- HW10 SolDocument7 pagesHW10 SolVictor Valdebenito100% (1)
- Emg 211 Module 1 Fut MinnaDocument13 pagesEmg 211 Module 1 Fut MinnaAbdlHameed FareedahPas encore d'évaluation
- On A General Form of Rk4 MethodDocument10 pagesOn A General Form of Rk4 MethodIgnacioF.FernandezPabaPas encore d'évaluation
- Topological Property - Wikipedia PDFDocument27 pagesTopological Property - Wikipedia PDFBxjdduPas encore d'évaluation
- Cauchy's TheoremDocument20 pagesCauchy's TheoremCyber_king123Pas encore d'évaluation
- M53 Lec1.4 ContinuityDocument49 pagesM53 Lec1.4 Continuitykennethleo69Pas encore d'évaluation
- 3c3-TrigonometSubstitu Stu PDFDocument12 pages3c3-TrigonometSubstitu Stu PDFMahmoud Abdel-SalamPas encore d'évaluation
- Lagrange's Equations: I BackgroundDocument16 pagesLagrange's Equations: I BackgroundTanNguyễnPas encore d'évaluation
- Algebra of Vector FieldsDocument4 pagesAlgebra of Vector FieldsVladimir LubyshevPas encore d'évaluation
- Metric Spaces PDFDocument33 pagesMetric Spaces PDFmatty20113Pas encore d'évaluation
- HW5 Solutions PDFDocument29 pagesHW5 Solutions PDFFunmath100% (1)
- Relativistic Electromagnetism: 6.1 Four-VectorsDocument15 pagesRelativistic Electromagnetism: 6.1 Four-VectorsRyan TraversPas encore d'évaluation
- M07 Handout - Functions of Several VariablesDocument7 pagesM07 Handout - Functions of Several VariablesKatherine SauerPas encore d'évaluation
- 2 6 Concave Upward and DownwardDocument5 pages2 6 Concave Upward and Downwardapi-299265916Pas encore d'évaluation
- Metric SpacesDocument42 pagesMetric SpacesAmol MittalPas encore d'évaluation
- BINOMIAL SeriesDocument25 pagesBINOMIAL SeriesBench AminPas encore d'évaluation
- Proof of The Riemann HypothesisDocument9 pagesProof of The Riemann HypothesisDavor ProfesorPas encore d'évaluation
- Application of CalculusDocument36 pagesApplication of CalculusTAPAS KUMAR JANAPas encore d'évaluation
- MATH2045: Vector Calculus & Complex Variable TheoryDocument50 pagesMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- Numerical Analysis Module 2 Fundamentals of Vector SpacesDocument33 pagesNumerical Analysis Module 2 Fundamentals of Vector Spacespartha4uPas encore d'évaluation
- Differential Geometry 2009-2010Document45 pagesDifferential Geometry 2009-2010Eric ParkerPas encore d'évaluation
- Hamiltonian Mechanics: 4.1 Hamilton's EquationsDocument9 pagesHamiltonian Mechanics: 4.1 Hamilton's EquationsRyan TraversPas encore d'évaluation
- Algebraic Topology Solutions 3Document7 pagesAlgebraic Topology Solutions 3Chris WalshPas encore d'évaluation
- Functions of Several VariablesDocument4 pagesFunctions of Several VariablesKonal ShahPas encore d'évaluation
- HW6 Solutions PDFDocument34 pagesHW6 Solutions PDFFunmathPas encore d'évaluation
- IdealDocument8 pagesIdealAzza Sundus AntartikaPas encore d'évaluation
- Dynamical Systems: 5.1 Phase PortraitsDocument36 pagesDynamical Systems: 5.1 Phase PortraitsRyan TraversPas encore d'évaluation
- Tutorial 5 - Derivative of Multivariable FunctionsDocument2 pagesTutorial 5 - Derivative of Multivariable FunctionsИбрагим Ибрагимов0% (1)
- Module 9: Numerical DifferentiationDocument4 pagesModule 9: Numerical DifferentiationBry RamosPas encore d'évaluation
- 116 hw1Document5 pages116 hw1thermopolis3012Pas encore d'évaluation
- Difference Calculus: N K 1 3 M X 1 N y 1 2 N K 0 KDocument9 pagesDifference Calculus: N K 1 3 M X 1 N y 1 2 N K 0 KAline GuedesPas encore d'évaluation
- Alder - Multivariate CalculusDocument198 pagesAlder - Multivariate Calculuscantor2000Pas encore d'évaluation
- The Differences Between Affine Space and Vector SpaceDocument9 pagesThe Differences Between Affine Space and Vector Spaceconmec.crplPas encore d'évaluation
- CompactnessDocument7 pagesCompactnessvamgaduPas encore d'évaluation
- Time Dependent Perturbation TheoryDocument39 pagesTime Dependent Perturbation TheoryGuna ShanthamurthyPas encore d'évaluation
- Part - I: Subjective Questions: Section (A) : General Term & Coefficient of X in (Ax +B)Document19 pagesPart - I: Subjective Questions: Section (A) : General Term & Coefficient of X in (Ax +B)wanderedPas encore d'évaluation
- Differentiable ManifoldsDocument5 pagesDifferentiable ManifoldsMohdPas encore d'évaluation
- SSBDocument39 pagesSSBErr33Pas encore d'évaluation
- Hexagonal Room-Model PDFDocument1 pageHexagonal Room-Model PDFsugamsehgalPas encore d'évaluation
- Som Final Course FileDocument24 pagesSom Final Course FilesugamsehgalPas encore d'évaluation
- Laser and Its ApplicationsDocument50 pagesLaser and Its ApplicationsmadangkPas encore d'évaluation
- Nanotechnology: by Rahul Singh B-Tech, Mba (Me)Document10 pagesNanotechnology: by Rahul Singh B-Tech, Mba (Me)sugamsehgalPas encore d'évaluation
- Class 12 Obs Booklet 2021-22Document59 pagesClass 12 Obs Booklet 2021-22nooraPas encore d'évaluation
- Chapter 6-Magnetic CeramicsDocument29 pagesChapter 6-Magnetic CeramicsVo Phong Phu0% (1)
- Celestial Sphere Star ChartsDocument3 pagesCelestial Sphere Star ChartsLonn ConleyPas encore d'évaluation
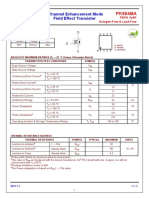
- Datasheet IntegradoDocument4 pagesDatasheet Integradoalan segundo garcia chotaPas encore d'évaluation
- A Comprehensive Approach To Integrity of Non-Piggable Pipelines Based On Combined DCVG/CIPS/MTM SurveyDocument15 pagesA Comprehensive Approach To Integrity of Non-Piggable Pipelines Based On Combined DCVG/CIPS/MTM SurveyDheeraj Chowdary DhanekulaPas encore d'évaluation
- Discrete Mathematics in The Real Life F 1Document13 pagesDiscrete Mathematics in The Real Life F 1api-535586809Pas encore d'évaluation
- Agitation MixingDocument58 pagesAgitation MixingHernanda Aldian SyahPas encore d'évaluation
- Soal Kindin LatihanDocument2 pagesSoal Kindin LatihanRudyPrawiraNegaraPas encore d'évaluation
- Mathematical Model of Systems:: Electro Mechanical System Transfer FunctionDocument17 pagesMathematical Model of Systems:: Electro Mechanical System Transfer Functionchardo santosPas encore d'évaluation
- Stabilization of Black Cotton Soil Using PDFDocument6 pagesStabilization of Black Cotton Soil Using PDFSushmit KatkalePas encore d'évaluation
- Safronov 2022 Ijg 2022092815151433 FullDocument98 pagesSafronov 2022 Ijg 2022092815151433 FullUivananPas encore d'évaluation
- Comparative Analysis of A Controller For A Magnetic Ball Levitation SystemDocument10 pagesComparative Analysis of A Controller For A Magnetic Ball Levitation SystemInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Answer - Solution - NEET-2023 (Code-E5) - Final PDFDocument73 pagesAnswer - Solution - NEET-2023 (Code-E5) - Final PDFRahul SainiPas encore d'évaluation
- Samuel AttoyeDocument129 pagesSamuel Attoyearun kumarPas encore d'évaluation
- Elementary Deferential Equation MTH232Document213 pagesElementary Deferential Equation MTH232Dejene GirmaPas encore d'évaluation
- Chapter 3 Problems: CW 3.4, 3.6, 3.7, 3.9, 3.24 HW 3.1, 3.3, 3.5 Now Let's Begins Solving Chapter 3 Classwork ProblemsDocument7 pagesChapter 3 Problems: CW 3.4, 3.6, 3.7, 3.9, 3.24 HW 3.1, 3.3, 3.5 Now Let's Begins Solving Chapter 3 Classwork ProblemsEbrahem ShaheinPas encore d'évaluation
- Impedance Analysis of Electrochemical Systems - VivierDocument38 pagesImpedance Analysis of Electrochemical Systems - VivierSureshBharadwajPas encore d'évaluation
- E 0083 ExtensometersDocument13 pagesE 0083 ExtensometersMohammed Abdul RasheedPas encore d'évaluation
- Mid-Wavelength Infrared InAsSb - InAs NBN PDFDocument5 pagesMid-Wavelength Infrared InAsSb - InAs NBN PDFaaaasassPas encore d'évaluation
- 5-Compressive Strength of Clay BricksDocument3 pages5-Compressive Strength of Clay BricksZhiwar oramari50% (2)
- Our Lesson: Self Learning Kit in Science Grade 3 First Quarter Week 3 States of MatterDocument4 pagesOur Lesson: Self Learning Kit in Science Grade 3 First Quarter Week 3 States of MatterPlay with NJ OfficialPas encore d'évaluation
- 23AhmedAl Hassani8-18Document209 pages23AhmedAl Hassani8-18abishek TaPas encore d'évaluation
- Root-Mean-Square Speed (RMS Speed)Document10 pagesRoot-Mean-Square Speed (RMS Speed)MD Al Fahad NirobPas encore d'évaluation
- Laboratory Equipment: Prepared By: Omeed S.Saadi Msc. Animal ProductionDocument23 pagesLaboratory Equipment: Prepared By: Omeed S.Saadi Msc. Animal ProductionShaker MahmoodPas encore d'évaluation
- Tet 213 Fibre Length - 112836Document3 pagesTet 213 Fibre Length - 112836maryamibrahimhassan437Pas encore d'évaluation
- Variable Star Classification and Light Curves Manual 2.1Document66 pagesVariable Star Classification and Light Curves Manual 2.1Ganesh ChandraPas encore d'évaluation
- EE3302Document2 pagesEE3302ashishPas encore d'évaluation
- Shock Pulse Monitoring: ApplicationsDocument18 pagesShock Pulse Monitoring: Applicationshari krishna100% (1)
- Revision: Previous Lecture Was About Variational Principle Euler-Lagrange Equation Hamilton's PrincipleDocument16 pagesRevision: Previous Lecture Was About Variational Principle Euler-Lagrange Equation Hamilton's PrincipleediealiPas encore d'évaluation
- Schwinger Action PrincipalDocument24 pagesSchwinger Action PrincipalLalit SinghPas encore d'évaluation
- Calculus Workbook For Dummies with Online PracticeD'EverandCalculus Workbook For Dummies with Online PracticeÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeD'EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeÉvaluation : 4 sur 5 étoiles4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsD'EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingD'EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)D'EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Pas encore d'évaluation
- Mental Math Secrets - How To Be a Human CalculatorD'EverandMental Math Secrets - How To Be a Human CalculatorÉvaluation : 5 sur 5 étoiles5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.D'EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Évaluation : 5 sur 5 étoiles5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsD'EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsÉvaluation : 3.5 sur 5 étoiles3.5/5 (9)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormD'EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormÉvaluation : 5 sur 5 étoiles5/5 (5)
- Transform Your 6-12 Math Class: Digital Age Tools to Spark LearningD'EverandTransform Your 6-12 Math Class: Digital Age Tools to Spark LearningPas encore d'évaluation
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathD'EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathÉvaluation : 5 sur 5 étoiles5/5 (1)
- Assessment Prep for Common Core Mathematics, Grade 6D'EverandAssessment Prep for Common Core Mathematics, Grade 6Évaluation : 5 sur 5 étoiles5/5 (1)