Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- NumaticsFRLFlexiblokR072010 EsDocument40 pagesNumaticsFRLFlexiblokR072010 EsGabriel San Martin RifoPas encore d'évaluation
- Introduction To PIC and Embedded SystemsDocument12 pagesIntroduction To PIC and Embedded Systemsheno ahPas encore d'évaluation
- GB-T 5137.1-2002 Test Methods of Safety Glazing Materials Used On Road Vehicles Part1 Mechanical Properties TestsDocument14 pagesGB-T 5137.1-2002 Test Methods of Safety Glazing Materials Used On Road Vehicles Part1 Mechanical Properties TestsRandyzhuPas encore d'évaluation
- Comparative Study of Steel Structure With and Without Floating Columns in EtabsDocument13 pagesComparative Study of Steel Structure With and Without Floating Columns in EtabsBehroz BehzadPas encore d'évaluation
- Ruby On Rails 3 Cheat SheetDocument7 pagesRuby On Rails 3 Cheat SheetJarosław MedwidPas encore d'évaluation
- GTP For 1CX300sqmmDocument4 pagesGTP For 1CX300sqmmpriyanka236Pas encore d'évaluation
- Evaluating of Rutting in Highways & Providing Its Solution in Terms of Stone Matrix Asphalt.Document7 pagesEvaluating of Rutting in Highways & Providing Its Solution in Terms of Stone Matrix Asphalt.IJRASETPublications100% (1)
- PTP Symmetric Om FNLDocument8 pagesPTP Symmetric Om FNLn888nPas encore d'évaluation
- Mathematical TricksDocument4 pagesMathematical Tricksapi-440622270Pas encore d'évaluation
- Sti260N6F6 Stp260N6F6: N-Channel 60 V, 0.0024 Ω, 120 A Stripfet™ Vi Deepgate™ Power Mosfet In To-220 And I²Pak PackagesDocument14 pagesSti260N6F6 Stp260N6F6: N-Channel 60 V, 0.0024 Ω, 120 A Stripfet™ Vi Deepgate™ Power Mosfet In To-220 And I²Pak PackagesRyn YahuFPas encore d'évaluation
- RWC 123 Manoj Prabhakar KaiwartDocument13 pagesRWC 123 Manoj Prabhakar KaiwartManoj Prabhakar KaiwartPas encore d'évaluation
- Design Principles of Rigid and Flexible PavementsDocument66 pagesDesign Principles of Rigid and Flexible PavementsWycliffe otienoPas encore d'évaluation
- Magnetic Field of A SolenoidDocument5 pagesMagnetic Field of A SolenoidKang Yuan ShingPas encore d'évaluation
- Robot Sensors and TransducersDocument176 pagesRobot Sensors and TransducerssakthivelPas encore d'évaluation
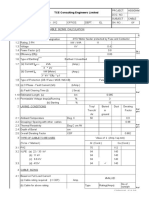
- Cable Sizing CalculationDocument72 pagesCable Sizing CalculationHARI my songs100% (1)
- Review Paper - Evolution of CMOS Ring OscillatorDocument10 pagesReview Paper - Evolution of CMOS Ring OscillatorNor Samida YaacobPas encore d'évaluation
- Fluid Mech. 2Document32 pagesFluid Mech. 2Leslie Owusu MensahPas encore d'évaluation
- Assigment Comouter Science BSCDocument3 pagesAssigment Comouter Science BSCutkarsh9978100% (1)
- Integrals - Integral Calculus - Math - Khan Academy PDFDocument7 pagesIntegrals - Integral Calculus - Math - Khan Academy PDFroberteleeroyPas encore d'évaluation
- TR 94 13Document25 pagesTR 94 13Christian Norambuena VallejosPas encore d'évaluation
- Ant CabDocument93 pagesAnt CabZubair MinhasPas encore d'évaluation
- Iec 60243-1-2013Document58 pagesIec 60243-1-2013FernandoCrespoMon100% (1)
- Plate - 3 (FLOT)Document2 pagesPlate - 3 (FLOT)patrick dgPas encore d'évaluation
- Executive Incentives and The Horizon Problem An - 1991 - Journal of AccountingDocument39 pagesExecutive Incentives and The Horizon Problem An - 1991 - Journal of AccountingYuhan JiPas encore d'évaluation
- S406 Specifications For The Supply of Stone PDFDocument6 pagesS406 Specifications For The Supply of Stone PDFMfanelo MbanjwaPas encore d'évaluation
- Lec1 PDFDocument12 pagesLec1 PDFtogarsPas encore d'évaluation
- Applications of Modern RF PhotonicsDocument213 pagesApplications of Modern RF PhotonicsrmcmillanPas encore d'évaluation
- LETRIST Locally Encoded Transform Feature HistograDocument16 pagesLETRIST Locally Encoded Transform Feature HistograHARE KRISHNAPas encore d'évaluation
- Mackie USB Driver InstructionsDocument4 pagesMackie USB Driver InstructionsSamuel CotoPas encore d'évaluation